Vous aimerez peut-être aussi
- T.P 02 (V2) CorrigésDocument4 pagesT.P 02 (V2) CorrigésMrnadhir Mecanique100% (1)
- Act 1-3Document6 pagesAct 1-3becem50% (2)
- 02-Poupee Mobile CorrigeDocument5 pages02-Poupee Mobile CorrigeElmouden Mustapha75% (8)
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineDocument8 pagesDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- Corrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MDocument5 pagesCorrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MArfaoui Aymen100% (1)
- TD Sur Les Embrayage - FreinDocument5 pagesTD Sur Les Embrayage - Freingerard correa86% (7)
- Exercice Limiteur de CoupleDocument4 pagesExercice Limiteur de CoupleMortadha Rabah100% (1)
- Guidage en Translation PDFDocument141 pagesGuidage en Translation PDFkharrat samir100% (1)
- Devoir de Controle N°2Document8 pagesDevoir de Controle N°2yves100% (2)
- TD6 Schéma Ciné Touret À MeulerDocument2 pagesTD6 Schéma Ciné Touret À MeulerHamza Elallam100% (7)
- Fraiseuse AutomatiqueDocument6 pagesFraiseuse AutomatiqueJawher Salem100% (1)
- Evaluation - Ajustements - Vrin Bosch - LvesDocument6 pagesEvaluation - Ajustements - Vrin Bosch - Lveskililibenali100% (1)
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Unité de Bouchonnage de FlaconsDocument4 pagesUnité de Bouchonnage de FlaconsAbderrazak MiassarPas encore d'évaluation
- TD Palan Électrique À Chaine1Document2 pagesTD Palan Électrique À Chaine1Ncib_Mohsen_468383% (6)
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Document6 pagesDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad88% (8)
- Révision Engrenage 2020Document15 pagesRévision Engrenage 2020Yosr Ben SaidPas encore d'évaluation
- Schéma Cinématique - 2020Document4 pagesSchéma Cinématique - 2020Mohsen LaabidiPas encore d'évaluation
- 3 Exercice EngrenageDocument9 pages3 Exercice EngrenageDhibMohamed0% (2)
- TD Limiteur de CoupleDocument2 pagesTD Limiteur de CoupleHamami Aymen100% (2)
- TP Etau À Ventouse ProfDocument5 pagesTP Etau À Ventouse Profmidoun100% (2)
- Capteur PneumatiqueDocument6 pagesCapteur Pneumatiquemom bakkouch100% (1)
- CorrectionDocument5 pagesCorrectionAdil Hassani Idrissi100% (3)
- Stat Graph Porte Autobus1Document4 pagesStat Graph Porte Autobus1Antoine BrndPas encore d'évaluation
- Guidage en TranslationDocument11 pagesGuidage en TranslationMohamed Slim KHACHROUMI50% (2)
- Exercice - Dispositif de Levage Et Basculement - CorrigDocument6 pagesExercice - Dispositif de Levage Et Basculement - CorrigKarina Kapour80% (5)
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- 0 - Activité 3Document6 pages0 - Activité 3Kamel TayahiPas encore d'évaluation
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemPas encore d'évaluation
- 26 Liaison ComplèteDocument20 pages26 Liaison ComplèteFarouk Keniou100% (1)
- Epreuve 2e Seq Mecanique Appliquee TF3Document2 pagesEpreuve 2e Seq Mecanique Appliquee TF3kaka kaladzePas encore d'évaluation
- TP3 Borne Réglable sujet+MEP PDFDocument8 pagesTP3 Borne Réglable sujet+MEP PDFdiopPas encore d'évaluation
- TD ConstructionDocument6 pagesTD ConstructionYoussef TrimechPas encore d'évaluation
- Série Guidage en Rotation PDFDocument7 pagesSérie Guidage en Rotation PDFTaieb BentaherPas encore d'évaluation
- Correction (Chariot Longitudinal) (Act 2-3)Document1 pageCorrection (Chariot Longitudinal) (Act 2-3)MIMFS100% (1)
- Fonction AssemblageDocument32 pagesFonction AssemblageyahyaouiPas encore d'évaluation
- Meule À MainDocument2 pagesMeule À MainHamza 01100% (1)
- Roulement BCDocument6 pagesRoulement BCOtman OtoPas encore d'évaluation
- Fonction Guidage en Rotation Par RoulementDocument4 pagesFonction Guidage en Rotation Par RoulementMIMFS100% (7)
- Calcul Durée de Vie Des Roulements V2Document6 pagesCalcul Durée de Vie Des Roulements V2PLAKOST & CIEPas encore d'évaluation
- Perceuse Sensitive Oyaka Nyemb Nyobe EbolembabgDocument14 pagesPerceuse Sensitive Oyaka Nyemb Nyobe Ebolembabgngouo75% (4)
- DS1 Scie Sauteuse 2010Document4 pagesDS1 Scie Sauteuse 2010mecaniquesti100% (1)
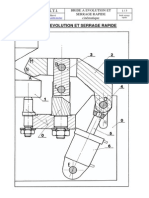
- Bride Serrage RapideDocument3 pagesBride Serrage RapideRedaAbdraouf0% (2)
- TD2 - Accouplement - Correction Inverseur de MarcheDocument6 pagesTD2 - Accouplement - Correction Inverseur de MarcheAbdelkhalek SaidiPas encore d'évaluation
- Chapitre 4 Les Contraintes DanterioriteDocument13 pagesChapitre 4 Les Contraintes DanterioriteTouhemi Ben Sadok100% (1)
- Exercice Limiteur de Couple Transmissible ÉèveDocument2 pagesExercice Limiteur de Couple Transmissible Éèvemohamed1101Pas encore d'évaluation
- TD Vérin Rotatif Amorti ÉlèveDocument5 pagesTD Vérin Rotatif Amorti ÉlèveZAEKHK ZEIGZA100% (2)
- AF2 ActivitésDocument24 pagesAF2 ActivitésArmand EssPas encore d'évaluation
- T.P 02 (V2) D RDocument5 pagesT.P 02 (V2) D RMrnadhir MecaniquePas encore d'évaluation
- System de Déplacement de Table de Machine À RainurerDocument63 pagesSystem de Déplacement de Table de Machine À RainurerSalma BouijiPas encore d'évaluation
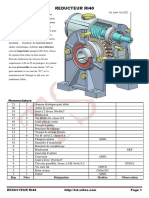
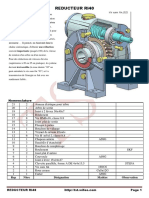
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDocument6 pagesREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- Reducteur RI40Document6 pagesReducteur RI40watsop75% (4)
- TP1-Correction TPDocument3 pagesTP1-Correction TPMzoughi HaythemPas encore d'évaluation
- Technique CDocument9 pagesTechnique Caziz hajriPas encore d'évaluation
- Analyse + Ensemble 2023Document7 pagesAnalyse + Ensemble 2023hamrouniPas encore d'évaluation
- Technique CDocument8 pagesTechnique CKarim FathiPas encore d'évaluation
- EPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeDocument6 pagesEPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeYounes El GhandouriPas encore d'évaluation
- TP4-2 GM WinchDocument5 pagesTP4-2 GM WinchDABAKH LDEEBOYPas encore d'évaluation
- DC3 4ScT (15-16) (1) Corr Cremaillère XDocument8 pagesDC3 4ScT (15-16) (1) Corr Cremaillère XWagih MrassiPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Exercice Sur La Programmation Iso G90-CorrigeDocument1 pageExercice Sur La Programmation Iso G90-CorrigekhocinePas encore d'évaluation
- QQDocument1 pageQQkhocinePas encore d'évaluation
- FLEXIONDocument6 pagesFLEXIONkhocinePas encore d'évaluation
- 06-Résumé-Engrenage Droit À Denture Droite PDFDocument1 page06-Résumé-Engrenage Droit À Denture Droite PDFkhocinePas encore d'évaluation
- Dessin EnsembleDocument1 pageDessin EnsemblekhocinePas encore d'évaluation
- Le Cycle Carre Avec Sequenc - Schéma 1Document1 pageLe Cycle Carre Avec Sequenc - Schéma 1khocinePas encore d'évaluation
- Encastrement PDFDocument8 pagesEncastrement PDFHechmi ChermitiPas encore d'évaluation
- Mise en Position PDFDocument2 pagesMise en Position PDFkhocine100% (2)
- SocleDocument1 pageSoclekhocinePas encore d'évaluation
- TDG (Cours)Document5 pagesTDG (Cours)khocinePas encore d'évaluation
- Torsion Simple Et ApplicationDocument8 pagesTorsion Simple Et ApplicationribabbouPas encore d'évaluation
- 34 Reducteur PDFDocument2 pages34 Reducteur PDFkhocine67% (6)
- Exercice 1Document1 pageExercice 1khocinePas encore d'évaluation
- Cotation de FabDocument2 pagesCotation de FabkhocinePas encore d'évaluation
- Dessin de DéfinitionDocument3 pagesDessin de DéfinitionkhocinePas encore d'évaluation
- Afrique 16Document1 pageAfrique 16khocinePas encore d'évaluation
- Conception D Un Montage de RoulementDocument3 pagesConception D Un Montage de RoulementkhocinePas encore d'évaluation
- Systeme Entrainement de TapisDocument1 pageSysteme Entrainement de TapiskhocinePas encore d'évaluation
- Conception D Un Montage de RoulementDocument1 pageConception D Un Montage de Roulementabder2222Pas encore d'évaluation
- Ot101 FR LeseprobeDocument13 pagesOt101 FR LeseprobeDvid7887Pas encore d'évaluation
- Dessin ReducteurDocument1 pageDessin ReducteurkhocinePas encore d'évaluation
- Dessin ReducteurDocument1 pageDessin ReducteurkhocinePas encore d'évaluation
- Coupes Par Et SeDocument1 pageCoupes Par Et SekhocinePas encore d'évaluation
- 01 L'Énergie PneumatiqueDocument2 pages01 L'Énergie Pneumatiqueجمال ضيفي100% (1)
- Devoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFDocument8 pagesDevoir de Synthèse N°2 - Génie Mécanique - Systéme de Conditionnement de Savons - 3ème Technique (2016-2017) MR Mlaouhi Slaheddine PDFkhocinePas encore d'évaluation
- Les Eléments Standards PDFDocument2 pagesLes Eléments Standards PDFkhocinePas encore d'évaluation
- 02 TerminologieDocument16 pages02 TerminologiekhocinePas encore d'évaluation
- _Document1 page_khocinePas encore d'évaluation
- TerminologieDocument10 pagesTerminologiekhocinePas encore d'évaluation
- 01 Généralité PDFDocument4 pages01 Généralité PDFkhocinePas encore d'évaluation
- Valvula VA1125-GGA-1Document7 pagesValvula VA1125-GGA-1Rodrigo Munoz GarridoPas encore d'évaluation
- Isara RDocument44 pagesIsara RAymeric CharonnatPas encore d'évaluation
- Lab 1Document2 pagesLab 1Serge RINAUDOPas encore d'évaluation
- Compte Rendu TP1Document10 pagesCompte Rendu TP1anisPas encore d'évaluation
- Telecommande Climatiseur Carrera - Recherche GoogDocument1 pageTelecommande Climatiseur Carrera - Recherche GoogSamy AmgPas encore d'évaluation
- CBS-500 CBS-700 : Multiband Compact AmplifiersDocument3 pagesCBS-500 CBS-700 : Multiband Compact Amplifiersguillaume caignePas encore d'évaluation
- RG S1A Titre II Facs 0 ZC VF SignéDocument13 pagesRG S1A Titre II Facs 0 ZC VF Signédekumedoria5Pas encore d'évaluation
- Inventaire Poste 60.30 KV METLILI 12.12Document31 pagesInventaire Poste 60.30 KV METLILI 12.12ameur.gachouchePas encore d'évaluation
- Catalogue Analogique Hdcvi 2023-2024 Version WebDocument21 pagesCatalogue Analogique Hdcvi 2023-2024 Version Webettafy.ibtissamPas encore d'évaluation
- Chapitre 0 Historique & Présentation GénéraleDocument6 pagesChapitre 0 Historique & Présentation Générale사라SaraPas encore d'évaluation
- Vitalia Premium VITVERT60T-mlDocument132 pagesVitalia Premium VITVERT60T-mlsedgehammerPas encore d'évaluation
- SM Ecosysm2640idw Series Rev3Document517 pagesSM Ecosysm2640idw Series Rev3Farapon Paul100% (1)
- TD Schemas Normes Installation DomestiqueDocument12 pagesTD Schemas Normes Installation DomestiqueAmdouni Tasnim100% (1)
- Rapport Ahmed WannesDocument21 pagesRapport Ahmed WannesWannes AhmedPas encore d'évaluation
- Exercice 1.: Question: Déterminer Les 3 Rapports de Transmission de Ce RéducteurDocument4 pagesExercice 1.: Question: Déterminer Les 3 Rapports de Transmission de Ce Réducteurakarne YounessPas encore d'évaluation
- 15 Wide Automation Walr24 2a ManuelDocument14 pages15 Wide Automation Walr24 2a ManuelmostroyaPas encore d'évaluation
- TP2 - 601Document3 pagesTP2 - 601amine milanoPas encore d'évaluation
- TP Aghalba Partie ÉlectriqueDocument19 pagesTP Aghalba Partie ÉlectriqueRafraf EzdinePas encore d'évaluation
- Catalogo BT Ose 250Document169 pagesCatalogo BT Ose 250JOSÉ FERNANDOPas encore d'évaluation
- Les Panneaux SolairesDocument15 pagesLes Panneaux SolairesMidou GasmiPas encore d'évaluation
- 001 Catalogo Do Delivery SM CD Heidelberg 102Document1 191 pages001 Catalogo Do Delivery SM CD Heidelberg 102Alexandre DomingosPas encore d'évaluation
- WorkForce-DS-510-Fiche TechniqueDocument2 pagesWorkForce-DS-510-Fiche TechniqueEmery IndigoPas encore d'évaluation
- TP Modelisation - Proteus Preactionneur Et Actionneur Electrique NomsDocument6 pagesTP Modelisation - Proteus Preactionneur Et Actionneur Electrique NomsAsm MaPas encore d'évaluation
- Dépense 2021 - Maint - Usine - 18-08-2021Document72 pagesDépense 2021 - Maint - Usine - 18-08-2021Trabelsi MoncefPas encore d'évaluation
- CHAP 11 MOB Tle ACADocument10 pagesCHAP 11 MOB Tle ACAbognonPas encore d'évaluation
- Extrait Ile MystérieuseDocument1 pageExtrait Ile Mystérieuseaza medPas encore d'évaluation
- TD MVT Plan - Portail - Prof - 2021-1Document4 pagesTD MVT Plan - Portail - Prof - 2021-1Dan CheridanPas encore d'évaluation
- Exo TrainDocument3 pagesExo TrainAmadou DiawaraPas encore d'évaluation
- 4055 4255 4455 Tracteurs Edition Mondiale IntroductionDocument9 pages4055 4255 4455 Tracteurs Edition Mondiale IntroductionGranjoux MickaelPas encore d'évaluation
- Travaux de Renovation BonDocument2 pagesTravaux de Renovation BonHermann Boris NochePas encore d'évaluation