Vous aimerez peut-être aussi
- Inf AutoresDocument1 pageInf AutoresZule VallejoPas encore d'évaluation
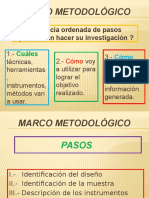
- Marco MetodológicoDocument15 pagesMarco MetodológicoZule VallejoPas encore d'évaluation
- Preguntas Música en El Periodo BarrocoDocument1 pagePreguntas Música en El Periodo BarrocoZule VallejoPas encore d'évaluation
- Informe 1 Robotica IndustrialDocument16 pagesInforme 1 Robotica IndustrialZule Vallejo100% (1)
- Diagrama de Flujo ArañaDocument1 pageDiagrama de Flujo ArañaZule VallejoPas encore d'évaluation
- PROYECTO 3 Redes IndDocument7 pagesPROYECTO 3 Redes IndZule VallejoPas encore d'évaluation
- Rockwell AutomationDocument11 pagesRockwell AutomationZule VallejoPas encore d'évaluation
- ASMEDocument2 pagesASMEZule VallejoPas encore d'évaluation
- Rockwell AutomationDocument11 pagesRockwell AutomationZule VallejoPas encore d'évaluation
- D. Administrativo FinalDocument14 pagesD. Administrativo FinalDANNA ALEJANDRA LA MADRID TOLEDOPas encore d'évaluation
- Clasificacion de Las Funciones Por Sus PropiedadesDocument3 pagesClasificacion de Las Funciones Por Sus Propiedadesmercedezbenz0127100% (3)
- OSSENBACH-Estado y Educación en América Latina A Partir de Su IndependenciaDocument15 pagesOSSENBACH-Estado y Educación en América Latina A Partir de Su IndependenciaJulian VivarPas encore d'évaluation
- TESIS Diferencial-GPS (Angel Ortega, Franklin López, Monica Zabala)Document126 pagesTESIS Diferencial-GPS (Angel Ortega, Franklin López, Monica Zabala)Javier Mosquera CarrilloPas encore d'évaluation
- Res. Sunafil 039-2016Document1 pageRes. Sunafil 039-2016Marlene SanchezPas encore d'évaluation
- Excel 2016Document41 pagesExcel 2016Amador AbasoloPas encore d'évaluation
- Resumen H James HarringtonDocument4 pagesResumen H James HarringtonAlberto Kalach100% (1)
- Pra-For-194 Entrega Insumos GratuidadDocument1 pagePra-For-194 Entrega Insumos GratuidadWilman CastilloPas encore d'évaluation
- GLOSARIO. Hernandez, Meza, PratoDocument4 pagesGLOSARIO. Hernandez, Meza, PratoMaria MezaPas encore d'évaluation
- Bimbo Complemento PresupuestoDocument7 pagesBimbo Complemento PresupuestoJamie Pingo ParedesPas encore d'évaluation
- Tarea 1. Diagrama de Flujo PGIRS - Daniela C.Document5 pagesTarea 1. Diagrama de Flujo PGIRS - Daniela C.Daniela CastilloPas encore d'évaluation
- Carta ElectronicaDocument6 pagesCarta ElectronicaYeshua Guzman25% (8)
- Sem 4 EVIDENCIADocument6 pagesSem 4 EVIDENCIAYanet JaramilloPas encore d'évaluation
- Desarrollo Contenedores-Tratamientos Especiales PresentacionDocument52 pagesDesarrollo Contenedores-Tratamientos Especiales PresentacionalexminayaPas encore d'évaluation
- Estudio de Caso: La Oportunidad de Formarme: Actividad 3.2Document5 pagesEstudio de Caso: La Oportunidad de Formarme: Actividad 3.2Vanessa ObandoPas encore d'évaluation
- Renuncia - GPTDocument1 pageRenuncia - GPTRICARDO ARTURO ALTEZ INCISOPas encore d'évaluation
- EJE 2, Herramientas para El Mejoramiento de La CalidadDocument8 pagesEJE 2, Herramientas para El Mejoramiento de La CalidadMaría Alejandra Castellanos SalinasPas encore d'évaluation
- LISTA CHEQUEO UNICA RADICACION BPM FFVV Version - 28102019Document4 pagesLISTA CHEQUEO UNICA RADICACION BPM FFVV Version - 28102019KevinHernándezPas encore d'évaluation
- Vaa Not 08092009-8054Document7 pagesVaa Not 08092009-8054Duvany Vidal CaballeroPas encore d'évaluation
- Acta de Entrega Huacahuasi DerechoDocument2 pagesActa de Entrega Huacahuasi DerechoIvan Mamani MermaPas encore d'évaluation
- MSDS Cherteston 274Document8 pagesMSDS Cherteston 274Italo JaureguiPas encore d'évaluation
- Datos Abiertos Panama PDFDocument21 pagesDatos Abiertos Panama PDFsapie43Pas encore d'évaluation
- Brunner (2007) - Prometeo de Visita ALDocument7 pagesBrunner (2007) - Prometeo de Visita ALsoydementelibrePas encore d'évaluation
- S4 SOL Derivadas ParametricasDocument6 pagesS4 SOL Derivadas ParametricasDiego ZumaránPas encore d'évaluation
- Cuestionario Sobre La Norma Iso 17025Document2 pagesCuestionario Sobre La Norma Iso 17025Erly Quispe BegazoPas encore d'évaluation
- Contencioso Cuadro ComparativoDocument2 pagesContencioso Cuadro ComparativoAstrid Bethania Flores100% (1)
- Caso Practico 2Document2 pagesCaso Practico 2Arturo Lobatón0% (1)
- Contrato de Presentación Robinsón Oswaldo Yánez ParedesDocument2 pagesContrato de Presentación Robinsón Oswaldo Yánez ParedesLisbet MeroPas encore d'évaluation
- YorokobuDocument100 pagesYorokobujosedora1100% (1)
- Modelo de Declaracion Jurada DosDocument1 pageModelo de Declaracion Jurada DosDANIELAPas encore d'évaluation