Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Research ArticleDocument7 pagesResearch ArticleHamed MasterPas encore d'évaluation
- Hysteretic Effects of Dry Friction: Modelling and Experimental StudiesDocument19 pagesHysteretic Effects of Dry Friction: Modelling and Experimental StudiesHamed MasterPas encore d'évaluation
- Byg r030 PDFDocument17 pagesByg r030 PDFHamed MasterPas encore d'évaluation
- A Bowed String Physical Model Including Finite-Width Thermal Friction and Hair DynamicsDocument7 pagesA Bowed String Physical Model Including Finite-Width Thermal Friction and Hair DynamicsHamed MasterPas encore d'évaluation
- Basics of Vibration DynamicsDocument41 pagesBasics of Vibration DynamicshahahaPas encore d'évaluation
- Feasibility Study For The Establishment of A Multi-Story Car Park, A Case StudyDocument10 pagesFeasibility Study For The Establishment of A Multi-Story Car Park, A Case StudyNICKAJO DIVINOPas encore d'évaluation
- Distributed Friction Damping of Travelling Wave Vibration in RodsDocument17 pagesDistributed Friction Damping of Travelling Wave Vibration in RodsHamed MasterPas encore d'évaluation
- Hysteretic Effects of Dry Friction: Modelling and Experimental StudiesDocument19 pagesHysteretic Effects of Dry Friction: Modelling and Experimental StudiesHamed MasterPas encore d'évaluation
- Frictional Passive Damping in A Beam On Foundation Under Moving LoadsDocument2 pagesFrictional Passive Damping in A Beam On Foundation Under Moving LoadsHamed MasterPas encore d'évaluation
- Alternative Method For Identification of The Dynamic Properties of Bolted JointsDocument2 pagesAlternative Method For Identification of The Dynamic Properties of Bolted JointsHamed MasterPas encore d'évaluation
- 707419Document19 pages707419Hamed MasterPas encore d'évaluation
- Thesis CPVDocument127 pagesThesis CPVHamed MasterPas encore d'évaluation
- Analysis of Dynamic Systems With Various Friction LawsDocument31 pagesAnalysis of Dynamic Systems With Various Friction LawsHamed MasterPas encore d'évaluation
- (Wiley) Noise and Vibration Control Engineering (2005)Document501 pages(Wiley) Noise and Vibration Control Engineering (2005)Rafael Bispo100% (1)
- Damping of Rotating Beams With Particle Dampers: Discrete Element Method AnalysisDocument5 pagesDamping of Rotating Beams With Particle Dampers: Discrete Element Method AnalysisHamed MasterPas encore d'évaluation
- 06 14Document9 pages06 14Hamed MasterPas encore d'évaluation
- Squeeze-Film Damping Characteristics of Cantilever Microresonators For Higher Modes of Flexural VibrationDocument13 pagesSqueeze-Film Damping Characteristics of Cantilever Microresonators For Higher Modes of Flexural VibrationHamed MasterPas encore d'évaluation
- Application of Sensors in An Experimental Investigation of Mode DDocument284 pagesApplication of Sensors in An Experimental Investigation of Mode DHamed MasterPas encore d'évaluation
- ForcesDocument56 pagesForceszeromeansPas encore d'évaluation
- 3 PDFDocument5 pages3 PDFHamed MasterPas encore d'évaluation
- An Analytical Particle Damping ModelDocument12 pagesAn Analytical Particle Damping ModelNayim MohammadPas encore d'évaluation
- 3 PDFDocument5 pages3 PDFHamed MasterPas encore d'évaluation
- Study On Improvement of Damping in Jointed Cantilever Beams Using FEMDocument8 pagesStudy On Improvement of Damping in Jointed Cantilever Beams Using FEMHamed MasterPas encore d'évaluation
- Bbo Chaos 2009Document16 pagesBbo Chaos 2009Hamed MasterPas encore d'évaluation
- Adjust PhotoDocument9 pagesAdjust PhotoHamed MasterPas encore d'évaluation
- ArchimerDocument16 pagesArchimerHamed MasterPas encore d'évaluation
- Damping of Rotating Beams With Particle Dampers: Discrete Element Method AnalysisDocument5 pagesDamping of Rotating Beams With Particle Dampers: Discrete Element Method AnalysisHamed MasterPas encore d'évaluation
- Study On Improvement of Damping in Jointed Cantilever Beams Using FEMDocument8 pagesStudy On Improvement of Damping in Jointed Cantilever Beams Using FEMHamed MasterPas encore d'évaluation
- Voice Stress PDFDocument120 pagesVoice Stress PDFHamed MasterPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Envicool Cabinet Air Conditioner Service ManualDocument22 pagesEnvicool Cabinet Air Conditioner Service ManualCONSORCIO TECA 2019100% (2)
- Rockfall Brochure Aug 2009 MaccaferriDocument20 pagesRockfall Brochure Aug 2009 MaccaferriAxelPas encore d'évaluation
- Sika Anchorfix 2 Pds enDocument7 pagesSika Anchorfix 2 Pds enHernawaty Chr SilalahiPas encore d'évaluation
- 10 Stainless Steel PDFDocument86 pages10 Stainless Steel PDFPopovici PaulPas encore d'évaluation
- Chemical & Process Technology - Determine Latent Heat For Multi-Component and Relieving Area Using Rigorous Method in HYSYSDocument6 pagesChemical & Process Technology - Determine Latent Heat For Multi-Component and Relieving Area Using Rigorous Method in HYSYSAnonymous q95lwCgPas encore d'évaluation
- High Voltage Transformer: InstructablesDocument6 pagesHigh Voltage Transformer: InstructablespinoPas encore d'évaluation
- Thermoplastic - WikipediaDocument5 pagesThermoplastic - Wikipediakirthi83Pas encore d'évaluation
- Equipment List Corn Oil Update Terbaru 01-10-2011Document8 pagesEquipment List Corn Oil Update Terbaru 01-10-2011ayiep1202Pas encore d'évaluation
- SP-P-005 - Rev 1 - Specification For Underground PipingDocument12 pagesSP-P-005 - Rev 1 - Specification For Underground Pipingvishal bhamrePas encore d'évaluation
- Mastercam Lathe Lesson 7 CAMInstructorDocument56 pagesMastercam Lathe Lesson 7 CAMInstructordanquinn24100% (1)
- Tutorial IIDocument5 pagesTutorial IIMushtansir AnsariPas encore d'évaluation
- HiltiDocument3 pagesHiltiLiam WilliamsPas encore d'évaluation
- Lighting: Tef 2440 Obstruction Light Low Intensity, Type ADocument2 pagesLighting: Tef 2440 Obstruction Light Low Intensity, Type Apramod_tryPas encore d'évaluation
- Engineering Metallurgy MM207 IIT Bombay Kashyap Sir Dislocation Grains Grain Boundary SlidesDocument97 pagesEngineering Metallurgy MM207 IIT Bombay Kashyap Sir Dislocation Grains Grain Boundary SlidesPratik BabhulkarPas encore d'évaluation
- Fast Moving Consumer Goods (FMCG) Products and ProjectsDocument4 pagesFast Moving Consumer Goods (FMCG) Products and ProjectsMurali Krishna ThotaPas encore d'évaluation
- Supra 644, 744, 844 Beginning With Serial# Hfy90593608 - Sunbelt ...Document68 pagesSupra 644, 744, 844 Beginning With Serial# Hfy90593608 - Sunbelt ...Glacial100% (1)
- 5 Electricity Test AnswersDocument4 pages5 Electricity Test AnswersnajehPas encore d'évaluation
- PPTDocument12 pagesPPTajaydev2224Pas encore d'évaluation
- Prestartup Check List of HRSGDocument3 pagesPrestartup Check List of HRSGmd abPas encore d'évaluation
- Dow Coring Asia ManualDocument69 pagesDow Coring Asia ManualGULJAR SINGHPas encore d'évaluation
- DRM Wha B PDFDocument31 pagesDRM Wha B PDFBryan JohnsonPas encore d'évaluation
- Damp Proof - PIS PDFDocument2 pagesDamp Proof - PIS PDFArun KumarPas encore d'évaluation
- MITx2 854 1x-V000900 - DTH-enDocument3 pagesMITx2 854 1x-V000900 - DTH-enLeonardo RamosPas encore d'évaluation
- 01 Samss 048 PDFDocument21 pages01 Samss 048 PDFMohamed SolimanPas encore d'évaluation
- Exercise 4.3Document3 pagesExercise 4.3Anonymous w7ujq3cH2FPas encore d'évaluation
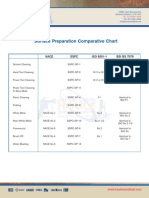
- Surface Preparation Comparative ChartDocument1 pageSurface Preparation Comparative Chartcmms88Pas encore d'évaluation
- Power Plant and Calculations - 15-Equipments Efficiency Calculation in Power PlantDocument12 pagesPower Plant and Calculations - 15-Equipments Efficiency Calculation in Power PlantRajeshPas encore d'évaluation
- Prepare Plumbing Materials and ToolsDocument9 pagesPrepare Plumbing Materials and ToolsDanjo Fernandez0% (1)
- GPT 1-3 PGE Tech SpecificationsDocument4 pagesGPT 1-3 PGE Tech SpecificationsEhtisham AndrAbiPas encore d'évaluation
- Artigo - Contribuição em Estudos Reológicos de Autonivelante Com Adição de Resíduo Rocha OrnamentalDocument12 pagesArtigo - Contribuição em Estudos Reológicos de Autonivelante Com Adição de Resíduo Rocha OrnamentalDjalma NetoPas encore d'évaluation