Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- 028Document2 pages028Wan Fikri DarmawanPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Intelligent Solutions Cover Page DesignDocument4 pagesIntelligent Solutions Cover Page DesignWan Fikri DarmawanPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Sikagrout® 215 (New) : Product Data SheetDocument3 pagesSikagrout® 215 (New) : Product Data SheetWan Fikri DarmawanPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Material Take-Off: Table 26: Material List 2 - by Section PropertyDocument2 pagesMaterial Take-Off: Table 26: Material List 2 - by Section PropertyWan Fikri DarmawanPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Wartegg Test PDFDocument1 pageWartegg Test PDFWan Fikri DarmawanPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Material Take-Off: Table 26: Material List 2 - by Section PropertyDocument2 pagesMaterial Take-Off: Table 26: Material List 2 - by Section PropertyWan Fikri DarmawanPas encore d'évaluation
- RT041Document11 pagesRT041Wan Fikri DarmawanPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Wartegg Test PDFDocument1 pageWartegg Test PDFWan Fikri DarmawanPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Crack Depth Method PDFDocument8 pagesCrack Depth Method PDFWan Fikri DarmawanPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Mahmoudipour 8Document8 pagesMahmoudipour 8Md. Murtuja AlamPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Pengaruh Variasi Ketebalan Selimut Beton Terhadap Lentur Balok Beton Bertulang Pasca BakarDocument11 pagesPengaruh Variasi Ketebalan Selimut Beton Terhadap Lentur Balok Beton Bertulang Pasca BakarWan Fikri DarmawanPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- 2.2 Health Monitoring and Damage Assessment of Buildings Using Strong Motion and Ambient DataDocument4 pages2.2 Health Monitoring and Damage Assessment of Buildings Using Strong Motion and Ambient DataWan Fikri DarmawanPas encore d'évaluation
- Half Cell Potential of Uncoated Reinforcing Steel in Concrete C 876 PDFDocument6 pagesHalf Cell Potential of Uncoated Reinforcing Steel in Concrete C 876 PDFHamidAffandyPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- ICST - Paper TemplateDocument5 pagesICST - Paper TemplateWan Fikri DarmawanPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- A Story Damage Index of Seismically-Excited Buildings Based On Modal Frequency and Mode ShapeDocument15 pagesA Story Damage Index of Seismically-Excited Buildings Based On Modal Frequency and Mode ShapeWan Fikri DarmawanPas encore d'évaluation
- 9 Vol7 211 PDFDocument6 pages9 Vol7 211 PDFWan Fikri DarmawanPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Structural Health Monitoring StandardsDocument9 pagesStructural Health Monitoring StandardsWan Fikri DarmawanPas encore d'évaluation
- 11 Ch4 5 Pushover AnalysisDocument12 pages11 Ch4 5 Pushover AnalysisWan Fikri DarmawanPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Diego Giraldo PDFDocument167 pagesDiego Giraldo PDFWan Fikri DarmawanPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 11 Ch4 5 Pushover AnalysisDocument12 pages11 Ch4 5 Pushover AnalysisWan Fikri DarmawanPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- 11 Ch4 5 Pushover AnalysisDocument12 pages11 Ch4 5 Pushover AnalysisWan Fikri DarmawanPas encore d'évaluation
- 5 Plastic AnalysisDocument14 pages5 Plastic AnalysisParveen RidhalPas encore d'évaluation
- Tugas1 - Wan Fikri Darmawan - Rekayasa Pondasi 1 - Kelas CDocument1 pageTugas1 - Wan Fikri Darmawan - Rekayasa Pondasi 1 - Kelas CWan Fikri DarmawanPas encore d'évaluation
- Sensitivity of Dynamic Methods For Damage Detection in Structural Concrete BridgesDocument13 pagesSensitivity of Dynamic Methods For Damage Detection in Structural Concrete BridgesWan Fikri DarmawanPas encore d'évaluation
- MeikiDocument12 pagesMeikiWan Fikri DarmawanPas encore d'évaluation
- Task-6-Abstract-Exploring The Abstract - Bobby AnsyariDocument4 pagesTask-6-Abstract-Exploring The Abstract - Bobby AnsyariWan Fikri DarmawanPas encore d'évaluation
- Sublist 8 of The Academic Word ListDocument1 pageSublist 8 of The Academic Word ListWan Fikri DarmawanPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Table of ContentDocument8 pagesTable of ContentWan Fikri DarmawanPas encore d'évaluation
- Psda Ts Air Tanah-10Document25 pagesPsda Ts Air Tanah-10Wan Fikri DarmawanPas encore d'évaluation
- Polypac BalseleDocument18 pagesPolypac BalseleRenato GouveiaPas encore d'évaluation
- Backup BatteryDocument4 pagesBackup Batteryzabiruddin786Pas encore d'évaluation
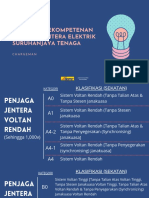
- Kategori Kompeten Penjaga Jentera Elektrik STDocument9 pagesKategori Kompeten Penjaga Jentera Elektrik STAbun ParadoxsPas encore d'évaluation
- Sir VisvesvarayyaDocument1 pageSir VisvesvarayyaJohn SparrowPas encore d'évaluation
- NexstarcommprotDocument8 pagesNexstarcommprotskirmixPas encore d'évaluation
- Research Report (JAHANGIR'S TOMB)Document24 pagesResearch Report (JAHANGIR'S TOMB)ahmerPas encore d'évaluation
- General Description: Dual Retriggerable Precision Monostable MultivibratorDocument17 pagesGeneral Description: Dual Retriggerable Precision Monostable Multivibratorsajad hejaziPas encore d'évaluation
- Wheelchair Lift Executive SummaryDocument5 pagesWheelchair Lift Executive SummaryIsabelle HanafiahPas encore d'évaluation
- FC Model - 012201Document4 pagesFC Model - 012201jlvega18Pas encore d'évaluation
- Atv71 Controller Inside en v3Document25 pagesAtv71 Controller Inside en v3Juan Rodriguez ArevaloPas encore d'évaluation
- Presentation 1Document8 pagesPresentation 1JACKMAAAAPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 06-DC Compound MotorDocument44 pages06-DC Compound MotorN. iManPas encore d'évaluation
- Water Cooled Chiller (SHUBAILY GRAND MALL)Document40 pagesWater Cooled Chiller (SHUBAILY GRAND MALL)kdpmansiPas encore d'évaluation
- New Concept in AC Power TheoryDocument8 pagesNew Concept in AC Power TheoryGabor PeterPas encore d'évaluation
- ERZG Blanking Plug Technical DatasheetDocument3 pagesERZG Blanking Plug Technical DatasheetEvolution Oil ToolsPas encore d'évaluation
- 7-Strengthening Mechanisms - SlidesDocument74 pages7-Strengthening Mechanisms - SlidesRyan TorresPas encore d'évaluation
- Cs Acrovyn CatalogueDocument83 pagesCs Acrovyn CatalogueBoboc AndreiPas encore d'évaluation
- Maz18 Maz38 ManualDocument5 pagesMaz18 Maz38 Manualheritage336Pas encore d'évaluation
- MANSAVER Catalog PDFDocument155 pagesMANSAVER Catalog PDFDejanPas encore d'évaluation
- Armor Piercing Bullets With Sintered Carbide Cores PDFDocument137 pagesArmor Piercing Bullets With Sintered Carbide Cores PDFfogdartPas encore d'évaluation
- Protection For HV Line BayDocument3 pagesProtection For HV Line BayhasaladPas encore d'évaluation
- Optis - Ow - LM - Ug - 2014 SP1 PDFDocument251 pagesOptis - Ow - LM - Ug - 2014 SP1 PDFRaghavPas encore d'évaluation
- JSA Basket TransferDocument3 pagesJSA Basket TransferCristina Rican100% (1)
- Lab Report For Epoxy Resin Polymer Concrete by GroupbbbbbbbDocument23 pagesLab Report For Epoxy Resin Polymer Concrete by GroupbbbbbbbBetelhem KiflePas encore d'évaluation
- Bicmos InvertersDocument10 pagesBicmos InvertersLily SharmaPas encore d'évaluation
- GP2500S/GP2501S - STN Color: Pro-Face Graphic Operator InterfacesDocument2 pagesGP2500S/GP2501S - STN Color: Pro-Face Graphic Operator Interfacesthanh_cdt01Pas encore d'évaluation
- Performance-Based Seismic Design of Rocking Shallow Foundations in Cohesive SoilDocument14 pagesPerformance-Based Seismic Design of Rocking Shallow Foundations in Cohesive SoilSong FendaPas encore d'évaluation
- SSH Client LogDocument82 pagesSSH Client LogintorefPas encore d'évaluation
- MQ-4C TritonDocument2 pagesMQ-4C TritonLeakSourceInfoPas encore d'évaluation