Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- En 132011 3 2015 2019 PDFDocument68 pagesEn 132011 3 2015 2019 PDFPrem Anand100% (2)
- Gear Diagnostics in A Planetary Gearbox A Study Using Internal and External Spur GearsDocument14 pagesGear Diagnostics in A Planetary Gearbox A Study Using Internal and External Spur GearsPradeep KunduPas encore d'évaluation
- Frequencydomainaveragingbasedexperimentalevaluationof Gear Fault Without Tachometer For Fluctuating Speed ConditionsDocument18 pagesFrequencydomainaveragingbasedexperimentalevaluationof Gear Fault Without Tachometer For Fluctuating Speed ConditionsPradeep KunduPas encore d'évaluation
- Multi-Fault Classification Based On Wavelet SVM With PSO Algorithm To Analyze Vibration Signals From Rolling Element BearingsDocument12 pagesMulti-Fault Classification Based On Wavelet SVM With PSO Algorithm To Analyze Vibration Signals From Rolling Element BearingsPradeep KunduPas encore d'évaluation
- Gear Crack Detection Using Modified TSA and Proposed Fault Indicators For Fluctuating Speed ConditionsDocument16 pagesGear Crack Detection Using Modified TSA and Proposed Fault Indicators For Fluctuating Speed ConditionsPradeep KunduPas encore d'évaluation
- Gearbox Fault Diagnosis Using RMS Based PDF and Entropy Mesasures For Fluctuating Speed ConditionsDocument15 pagesGearbox Fault Diagnosis Using RMS Based PDF and Entropy Mesasures For Fluctuating Speed ConditionsPradeep KunduPas encore d'évaluation
- Art:10.1007/s00170 013 5065 ZDocument15 pagesArt:10.1007/s00170 013 5065 ZPradeep KunduPas encore d'évaluation
- A Review of Gear Fault Diagnosis Using Various Condition IndicatorsDocument11 pagesA Review of Gear Fault Diagnosis Using Various Condition IndicatorsPradeep KunduPas encore d'évaluation
- Rodney K. Singleton II, Elias G. Strangas and Selin AviyenteDocument7 pagesRodney K. Singleton II, Elias G. Strangas and Selin AviyentePradeep KunduPas encore d'évaluation
- An Improved Exponential Model For Predicting Remaining Useful Life of Rolling Element BearingsDocument12 pagesAn Improved Exponential Model For Predicting Remaining Useful Life of Rolling Element BearingsPradeep KunduPas encore d'évaluation
- A Nonlinear Degradation Model Based Method For Remaining Useful Life Prediction of Rolling Element BearingsDocument8 pagesA Nonlinear Degradation Model Based Method For Remaining Useful Life Prediction of Rolling Element BearingsPradeep KunduPas encore d'évaluation
- An Integrated Bayesian Approach To Prognositics of The Remaining Useful Life and Its Application On Bearing Degradation ProblemDocument6 pagesAn Integrated Bayesian Approach To Prognositics of The Remaining Useful Life and Its Application On Bearing Degradation ProblemPradeep KunduPas encore d'évaluation
- Remaining Useful Life Prediction For A Nonlinear Heterogeneous Wiener Process Model With An Adaptive DriftDocument14 pagesRemaining Useful Life Prediction For A Nonlinear Heterogeneous Wiener Process Model With An Adaptive DriftPradeep KunduPas encore d'évaluation
- A New Enhanced Feature Extraction Strategy For Bearing Remaining Useful Life EstimationDocument6 pagesA New Enhanced Feature Extraction Strategy For Bearing Remaining Useful Life EstimationPradeep KunduPas encore d'évaluation
- A Particle Filtering-Based Approach For Remaining Useful Life Predication of Rolling Element BearingsDocument8 pagesA Particle Filtering-Based Approach For Remaining Useful Life Predication of Rolling Element BearingsPradeep KunduPas encore d'évaluation
- Estimation of Remaining Useful Life of Ball Bearings Using Data Driven MethodologiesDocument7 pagesEstimation of Remaining Useful Life of Ball Bearings Using Data Driven MethodologiesPradeep KunduPas encore d'évaluation
- Health Monitoring and Fault Detection Using Wavelet Packet Technique and Multivariate Process Control MethodDocument4 pagesHealth Monitoring and Fault Detection Using Wavelet Packet Technique and Multivariate Process Control MethodPradeep KunduPas encore d'évaluation
- Remaining Useful Life Estimation in Rolling Bearings Utilizing Data-Driven Probabilistic E-Support Vectors RegressionDocument12 pagesRemaining Useful Life Estimation in Rolling Bearings Utilizing Data-Driven Probabilistic E-Support Vectors RegressionPradeep KunduPas encore d'évaluation
- K 751cda5k 5fca13c ? K @a?354da5k 21B54K ? K Ca 8? ? 5ca 3K 7D 3C ? BK 1 4K 3D D 91 35K @a?8 ?BC 3BK ?45 8KDocument7 pagesK 751cda5k 5fca13c ? K @a?354da5k 21B54K ? K Ca 8? ? 5ca 3K 7D 3C ? BK 1 4K 3D D 91 35K @a?8 ?BC 3BK ?45 8KPradeep KunduPas encore d'évaluation
- Research Article: Multifeatures Fusion and Nonlinear Dimension Reduction For Intelligent Bearing Condition MonitoringDocument11 pagesResearch Article: Multifeatures Fusion and Nonlinear Dimension Reduction For Intelligent Bearing Condition MonitoringPradeep KunduPas encore d'évaluation
- Lecture 3 - Curves in Space and Their TangentDocument38 pagesLecture 3 - Curves in Space and Their TangentNURUL YAHSIFAH SYQELLA BINTI YAHYA BK21110100Pas encore d'évaluation
- LENZE E84AVxCx - 8400 StateLine-HighLine-TopLine 0.25-45kW - v9-0 - ENDocument291 pagesLENZE E84AVxCx - 8400 StateLine-HighLine-TopLine 0.25-45kW - v9-0 - ENClaudioPas encore d'évaluation
- 18.06 Problem Set 3 SolutionsDocument5 pages18.06 Problem Set 3 SolutionsgadasPas encore d'évaluation
- TRD 5VDC PDFDocument2 pagesTRD 5VDC PDFGerman GodiPas encore d'évaluation
- HPMPeikko Group 001 TMAWebDocument36 pagesHPMPeikko Group 001 TMAWebMukesh ShettyPas encore d'évaluation
- Lab Test ReportDocument18 pagesLab Test ReportSumantrra ChattopadhyayPas encore d'évaluation
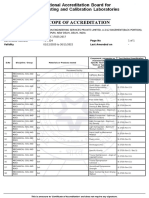
- Scope TC 9124Document1 pageScope TC 9124Esscon Engineering Services Pvt. Ltd.Pas encore d'évaluation
- ProjectDocument2 pagesProjectWaqas MaanPas encore d'évaluation
- AQA GCSE Chemistry AnswersDocument14 pagesAQA GCSE Chemistry AnswersErvin MetushiPas encore d'évaluation
- 4.3 Forced WavesDocument23 pages4.3 Forced WavesPritib KumarPas encore d'évaluation
- Prosprod I Casting Process (2) - Part2 PDFDocument36 pagesProsprod I Casting Process (2) - Part2 PDFPandu WibowoPas encore d'évaluation
- Seminar On Wireless Charging of Mobile DevicesDocument24 pagesSeminar On Wireless Charging of Mobile DevicesGourish Amonkar100% (1)
- 18-Division 2-Section 02900 PP Pipelines, Materials, Installation & TestingDocument19 pages18-Division 2-Section 02900 PP Pipelines, Materials, Installation & TestingAvaan IvaanPas encore d'évaluation
- 1.8 Rack Shift of The Gear: UndercutDocument6 pages1.8 Rack Shift of The Gear: UndercutJuanPas encore d'évaluation
- Op Protection KIDocument5 pagesOp Protection KIDragan IlicPas encore d'évaluation
- 01 Cleveland Ruth 1997 PDFDocument21 pages01 Cleveland Ruth 1997 PDFMarianne Zanon ZotinPas encore d'évaluation
- Vibration Analysis, Control and Optimum Accelerometer Placement For Successful Vibrations TestsDocument44 pagesVibration Analysis, Control and Optimum Accelerometer Placement For Successful Vibrations TestsVyankatesh AshtekarPas encore d'évaluation
- Millman and Parker - Geometry - A Metric PDFDocument388 pagesMillman and Parker - Geometry - A Metric PDFallan13080% (5)
- Interactive Powerpoint Presentation On QuadrilateralsDocument3 pagesInteractive Powerpoint Presentation On QuadrilateralsSkoochh KooPas encore d'évaluation
- Dvp-Es2 Ss2 Sa2 Sx2-Program o en 20110302Document14 pagesDvp-Es2 Ss2 Sa2 Sx2-Program o en 20110302yasinPas encore d'évaluation
- Mactor Report - Taller de Prospectiva D 2Document39 pagesMactor Report - Taller de Prospectiva D 2Giovani Alexis Saez VegaPas encore d'évaluation
- DLL - G8 Science - Q3 - F2FDocument2 pagesDLL - G8 Science - Q3 - F2FRAMIR BECOYPas encore d'évaluation
- Prediction and Visualization of Supersonic Nozzle Ows Using OpenfoamDocument22 pagesPrediction and Visualization of Supersonic Nozzle Ows Using OpenfoamSai Manohar RamachandranPas encore d'évaluation
- Convergence IndicatorDocument21 pagesConvergence Indicatorsikandar100% (1)
- Unit 3 Moulding Processes: StructureDocument18 pagesUnit 3 Moulding Processes: StructureChethan Madappady75% (4)
- Be & Ca PDFDocument45 pagesBe & Ca PDFRonimack Trajano de SouzaPas encore d'évaluation
- Se Single Phase Inverter DatasheetDocument2 pagesSe Single Phase Inverter DatasheetsabrahimaPas encore d'évaluation
- 1811.04061 Boshkayev Malafarina 2019Document9 pages1811.04061 Boshkayev Malafarina 2019AlejandroPas encore d'évaluation
- KISSsoft Calculation Programs For Machine DesignDocument22 pagesKISSsoft Calculation Programs For Machine DesignAbhijeet DeshmukhPas encore d'évaluation