Vous aimerez peut-être aussi
- Tecnologia Mecanica PDFDocument228 pagesTecnologia Mecanica PDFBoris Solares100% (2)
- Tecnologia Mecanica PDFDocument228 pagesTecnologia Mecanica PDFBoris Solares100% (2)
- Belt Conveyor Covers Global SolutionsDocument8 pagesBelt Conveyor Covers Global SolutionsalgorePas encore d'évaluation
- Complete CatalogDocument651 pagesComplete CatalogFernando EscriváPas encore d'évaluation
- b1103 PDFDocument24 pagesb1103 PDFemuno008Pas encore d'évaluation
- Complete CatalogDocument651 pagesComplete CatalogFernando EscriváPas encore d'évaluation
- Challenge Technical Catalogue ESDocument394 pagesChallenge Technical Catalogue ESscribdheinzPas encore d'évaluation
- Engineering - Catalog - Screw Conveyor PDFDocument64 pagesEngineering - Catalog - Screw Conveyor PDFanxaanPas encore d'évaluation
- General Product CatalogDocument56 pagesGeneral Product CatalogAgrif.bg-fovkaPas encore d'évaluation
- General Catalagoue Issue Sept 04 - EnglishandSpanish PDFDocument21 pagesGeneral Catalagoue Issue Sept 04 - EnglishandSpanish PDFemuno008Pas encore d'évaluation
- Complete CatalogDocument651 pagesComplete CatalogFernando EscriváPas encore d'évaluation
- Catalogo Productos CyC PDFDocument165 pagesCatalogo Productos CyC PDFemuno008Pas encore d'évaluation
- Tie Rod Cylinders: For Pushing and Positioning Workpieces & FixturesDocument2 pagesTie Rod Cylinders: For Pushing and Positioning Workpieces & Fixturesemuno008Pas encore d'évaluation
- b1103 PDFDocument24 pagesb1103 PDFemuno008Pas encore d'évaluation
- INVALCO CatalogDocument24 pagesINVALCO Catalogemuno008Pas encore d'évaluation
- Standard Swivels Catalog 2012Document11 pagesStandard Swivels Catalog 2012emuno008Pas encore d'évaluation
- FMC 105-TUP Bucket Elevator and Bucket CatalogDocument33 pagesFMC 105-TUP Bucket Elevator and Bucket Catalogemuno008Pas encore d'évaluation
- Surface Well Head Catalog WebDocument106 pagesSurface Well Head Catalog WebAnatoliy KozlovPas encore d'évaluation
- Weco Unions Catalog 2012Document15 pagesWeco Unions Catalog 2012emuno008Pas encore d'évaluation
- Sec HCDocument106 pagesSec HCemuno008Pas encore d'évaluation
- Catalogo Transportador Helicoidal PDFDocument48 pagesCatalogo Transportador Helicoidal PDFLucero LlantoyPas encore d'évaluation
- Cema Standar ScrewDocument54 pagesCema Standar ScrewjgrebollePas encore d'évaluation
- Sec HCDocument106 pagesSec HCemuno008Pas encore d'évaluation
- Catalogo Transportador Helicoidal PDFDocument48 pagesCatalogo Transportador Helicoidal PDFLucero LlantoyPas encore d'évaluation
- Cema Standar ScrewDocument54 pagesCema Standar ScrewjgrebollePas encore d'évaluation
- General Metering Products CatalogDocument4 pagesGeneral Metering Products Catalogemuno008Pas encore d'évaluation
- Catalogo Transportador Helicoidal PDFDocument48 pagesCatalogo Transportador Helicoidal PDFLucero LlantoyPas encore d'évaluation
- Model 200-30A200P-31-21A Solenoid ValveDocument4 pagesModel 200-30A200P-31-21A Solenoid Valveemuno008Pas encore d'évaluation
- INVALCO CatalogDocument24 pagesINVALCO Catalogemuno008Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 1345 3539 1 SMDocument10 pages1345 3539 1 SMYoga PrasytioPas encore d'évaluation
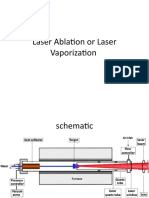
- Laser Ablation or Laser VaporizationDocument4 pagesLaser Ablation or Laser VaporizationJOEL STEPHEN 19BEE0262Pas encore d'évaluation
- Introduction To Semiconductors: Engr. Charmaine C. PaglinawanDocument19 pagesIntroduction To Semiconductors: Engr. Charmaine C. PaglinawanKenneth SablayPas encore d'évaluation
- NanoTechnology in Construction Carbon Nano TubeDocument53 pagesNanoTechnology in Construction Carbon Nano TubekumarPas encore d'évaluation
- Graduate Program CoursesDocument11 pagesGraduate Program CoursesAhmed Adel IbrahimPas encore d'évaluation
- Translate Clause in TCVN 5575Document2 pagesTranslate Clause in TCVN 5575Phương Do QuangPas encore d'évaluation
- Self-lubricating bearings guideDocument39 pagesSelf-lubricating bearings guideDevang RathodPas encore d'évaluation
- Aeroshell Fluid 41: Main Applications Specifications, Approvals & RecommendationsDocument2 pagesAeroshell Fluid 41: Main Applications Specifications, Approvals & Recommendationsabdul rehmanPas encore d'évaluation
- Thermal Stresses in Composite BarsDocument18 pagesThermal Stresses in Composite BarssofwanazminPas encore d'évaluation
- Applications of SuperconductivityDocument45 pagesApplications of SuperconductivityElif SoyluPas encore d'évaluation
- Detalhes Forja 2618-t61Document2 pagesDetalhes Forja 2618-t61guguimirandaPas encore d'évaluation
- Lecture 13 - Welding DefectsDocument4 pagesLecture 13 - Welding DefectsMichael TayactacPas encore d'évaluation
- Stress Concentration Factor - An Overview - ScienceDirect Topics PDFDocument20 pagesStress Concentration Factor - An Overview - ScienceDirect Topics PDFbhaskarrajusa8034Pas encore d'évaluation
- PFA Coating PFA Film - Teflon ™ PFADocument7 pagesPFA Coating PFA Film - Teflon ™ PFAmladen lakicPas encore d'évaluation
- Budget of Work in Science Vi First QuarterDocument3 pagesBudget of Work in Science Vi First QuarterSonny MatiasPas encore d'évaluation
- TDS - ER80S-B6.GTAW Rev1Document1 pageTDS - ER80S-B6.GTAW Rev1Erick VazquezPas encore d'évaluation
- P Module 8A PDFDocument66 pagesP Module 8A PDFSundareshwar SPas encore d'évaluation
- Liquid Pipeline Hydraulics GuideDocument131 pagesLiquid Pipeline Hydraulics GuideJohn Jairo Ramos100% (1)
- Physical Mechanisms of Hard Rock Fragmentation Under Mechanical Loading A ReviewDocument4 pagesPhysical Mechanisms of Hard Rock Fragmentation Under Mechanical Loading A Reviewjing xiaoPas encore d'évaluation
- M318D W8R MagneticoDocument2 pagesM318D W8R MagneticoGildo RodriguesPas encore d'évaluation
- Welding For Sour ServiceDocument20 pagesWelding For Sour Serviceأحمد حسن100% (4)
- Bar - ACI 318-08 - Metric - SalamaDocument6 pagesBar - ACI 318-08 - Metric - SalamaMourad BenaissaPas encore d'évaluation
- STERA3D Technical Manual PDFDocument310 pagesSTERA3D Technical Manual PDFMacPas encore d'évaluation
- Baterlle Two CurveDocument20 pagesBaterlle Two CurveAdam ThomsonPas encore d'évaluation
- Physical Properties Elastomeric Bearing MSTDocument4 pagesPhysical Properties Elastomeric Bearing MSTBudhi KurniawanPas encore d'évaluation
- BoilingDocument6 pagesBoilingpps companyPas encore d'évaluation
- JI VE320 MidExam#1Document4 pagesJI VE320 MidExam#1Enji HuPas encore d'évaluation
- 42.6-Electrical Quantities-Cie Igcse Physics Ext-Theory-Qp Core 2Document14 pages42.6-Electrical Quantities-Cie Igcse Physics Ext-Theory-Qp Core 2LiliPas encore d'évaluation
- Nusselt NumberDocument3 pagesNusselt NumberIzzat AshraffPas encore d'évaluation