END-EFFECTORS
—== ————
3.1, END-EFFECTORS:
© End effector is a device that is attached to the end of the wrist arm. to perform
specific task.
¥ The end-effector is the “hand” comnected to the robot's arm. It is often different
from a human hand. If could be a tool such as a gripper, a vacuum pump,
tweezers, scalpel, blowtorch - just about anything that helps it do its job.
¥ Some robots can change end-effectors, and be reprogrammed for a different set
of tasks.
v The end effector is attached to the wrist of the robot arm for the purpose of
loading, unloading, transporting parts or performing an operation on a work
piece.
© If the robot has more than one arm, there can be more than one end-effector on
the same robot, each suited for a specific task.
Examples of robot end effector:
— Gripper
— End of arm tooling
— Tools
— Welding equipment
3.1.1. Consideration of End Effector Design
An end effector of a robot can be designed to have several fingers, joints and
degree of freedom.
¥ Any combination of these factors gives different grasping modalities to the end
effector,
¥ The General end effectors can be grouped according to the type of grasping
modality as follows:
Robotics
— Change in size of part (shape, weight) between operations.
— Surface of part.
— Inherent size variation in parts.
— How part will be grasped?
Scratching and/or distortion of part for fragile materials
— Grasping force and gripper.
(i) Weight of object
Gi) Center of mass (stability)
(iii) Speed and acceleration of robot arm
(iv) Friction between parts
3.1.2. Basic Types of End Arm Tooling
1. Attachment device
~ 2. Support and containment device
3. Pneumatic pick up device
4. Magnetic pick up device
5. Mechanical grip device
3.1.3. Classification of End-of-Arm Tooling
() According to method used to hold part in the gripper
(@) Mechanical pressure grippers — Friction (or) Physical configuration of
the gripper retains the object
(b) Vacuum grippers — Used for flat object
(c) Magnetic devices — These devices are used for ferrous
: “object
(2) According to special-purpose process tools incorporated in final gripper design
(a) Drills -
“(®) Welding guns and torches
~(e) Paint sprayers
(d) Grinders
End-Effectors 3.3]
(Q) According to midtiple-function capability of gripper
{a) Speciat-purpose grippers: These grippers may be specialized device like
remote center compliance (RCC) to insert an external mating component into
internal member, viz., inserting a plug into hole.
3.1.3.2. Characteristics of End Arm Tooling
i. An end arm tooling weight should be minimum, since it is added to part
weight to determine the maximum payload.
2. It should be able to grasp, lift or release the part of family of parts required by
the manufacturing process.
3.2. GRIPPERS
Y Grippers are end effectors used to grasp and manipulate objects during the work
cycle.
¥ The objects are usually work parts that are moved from one location to another
in the cell. al
~ Machine loading and unloading applications fall into this category.
Y Owing to the variety of part shapes, sizes, and weights, grippers must usually be
custom designed.
3.2.1. Gripper Classification
The grippers may be classified into:
Y The part handling grippers are used to the grasp and hold objects that are
required to be transported from one pointed to another or placed for some
assembly operations
© The part handling applications include machine loading and unloading, picking
parts from a conveyor and moving parts, etc.
~ Types of gtippers used in industrial robot applications include the following:
Robotics
Mechanical
grippers
[7 Preumati¢
Hydraulic
Electro-
magnetic
Fig. 3.1. Classification of grippers
Different drive methods used for robot gripper system
‘There are three drive methods used for robot gripper system.
1, Electric drive
2. Hydraulic drive
3, Pneumatic drive
41, Electric Drives
The two types of actuators are used in electric drives:
(a) D.C Motor
(b) Stepper motor
2. Hydraulic Drive
The hydraulic drive system consists of:
1. Actuators
(a) Hydraulic motor
(b) Piston cylinder
(c) Swing motor
2. Control valves
3. Power units
End-Effectors 35
Electrohydraulic conversion drives are used for position control using electric
signals.
3. Pneumatic Drives
¥ Pneumatic power is used to operate the system.
¥ The components and working principle are similar to hydraulic drives.
Advantages of Pneumatic Drives
v Less expensive compared to hydraulic and electric drive system.
3.2.1.1. Types of Grippers
Mechanical finger grippers
. Collet grippers
‘Vacuum grippers
. Fragile-object grippers
Electromechanical grippers
. Support grippers
|. Expandable grippers
NAUEwWL =
3.2.1.2. Types of Mechanical Grippers
1. Mechanical finger grippers
(i) Single gripper-
(ii) Dual gripper
Multiple gripper
Expandable gripper
Internal gripper
External gripper
we ww
3.2.2, Mechanical Finger Grippers
v A mechanical gripper is an end effector that uses mechanical finger actuated by
mechanism to grasp an object.
¥ Mechanical grippers are used to transfer parts from one location to another or to
assemble parts. =
Y These grippers are of many types.
¥ Most common, can be angular or parallel.
Interchangeable
fingers
Gripper
Fig, 3.2. Mechanical gripper with interchangeable finger
Y They are used to perform some special tasks.
Vv Mechanical grippers, actuated by pneumatic / hydraulic J solenoid / motor
designed based on strength consideration and is-made as light as pos
Otherwise it will have heavy loading on other drive equipments.
Y Gripping by mechanical type finger is less versatile and less dextrose
holding by universal fingers as the grippers with mechanical fingers have
numbers of joints and less flexibility.
Y The grippers can be sub grouped according to finger classification, for e
the number of figures typically two, three, and five-finger types.
¥ The two finger gripper is the most popular.
3.2.3. Finger Grippers
¥ These will generally have two opposing fingers or three fingers like a
chuck.
Y The fingers are driven together such that once gripped any part is centred in
gripper. This gives some flexibility to the location of components at the pi
point
End-Effectors 37
¥ Two finger grippers can be further split into parallel motion or angular motion
fingers. =
¥ Robot end effectors can be classified on the basis of the mode of gripping as
external and internal gripping.
3.2.4. A Single Gripper
¥ The robot must reach into the production machine twice, once to unload the
finished part from the machine, and the second time to load the next part into
the machine.
3.2.5. Dual Gripper
~ The robot picks up the next work part. while the machine is still processing the
preceding part.
¥ When the machine finishes, the robot reaches into the machine once to remove
the finished part and load the next part. This reduces the cycle time per part.
Es
|
‘Switches
Part
Fig. 3.3. Dual gripper
3.2.6. Mechanical Grippers with Two Fingers
(1) Pivoting
¥ This is the most popular mechanical gripper for industrial robots. It can be
designed for limited shapes of an object, especially cylindrical workplace.
” If actuators that produce linear movement are used, like pneumatic piston-
cylinders, the device contains a pair of slider-crank mechanisms,
Robotics
Inthe slider crank mechanism shown in Fig.3.4 when the piston 1 is pushed by
pneumatic pressure to the right, the elements in the cranks 2 and 3, rotate
counter clockwise with the fulcrum F, and clockwise with the fulcrum F2
respectively, when 8 < 180°.
¥ These rotations make the grasping action at the extended end of the crank
elements 2 and 3.
W The releasing action can be obtained by moving the piston to the left, An angle
& ranging from 160° to 170° is commonly used.
Fy
Fig. 3.4. Schematic diagram of a gripper using slider-crank mechanism
(2) Swinging Gripper Mechanisms
¥ Figure 3.5 is another example of swinging gripper that uses the piston-cylin
This is the swing-block mechanism.
¥ The sliding rod 1, actuated by the pneumatic piston transmits motion by way
the two symmetrically arranged swing-block linkages 1-2-3-4 and 1-2-3'-4"
grasp or release the object by means of the subsequent swinging motions
links 4 and 4’ at their pivots Fy and Fp.
End-Effectors Be]
—_____]
Fig. 3.5. Schematic diagram of a gripper using swing block mechanism
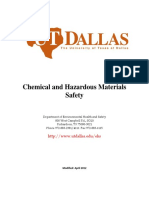
3.2.7. Mechanical Grippers with Three Fingers.
Figure 3.6 Gripper using three point chuck mechanism.
¥ 3-Finger grippers consists of simulate action of thumb, index finger and third
finger,
The increase of the number of fingers and degrees of freedom will greatly aid
the versatility of grippers.
¥ The main reason for using the three-finger gripper is its capability of grasping
the object in three spots, enabling both a tighter grip and the holding of
spherical objects of different size keeping the centre of the object at a specified
position.
[ Sse
Guide bar |
Fig. 3.6. Gripper using three point chuck mechanism
Robotics
¥ Three point chuck mechanisms are typically used for this purpose. Figure 3.6
gives an example of this gripper. Each finger motion is performed using ball-
serew mechanism.
¥ Electric motor output is transmitted to the screws attached to each finger
through bevel gear trains which rotate the screws.
v When each screw is rotated clockwise or anticlockwise, the translational motion
of each finger will be produced, which results in the grasping-releasing action.
¥ Four-Finger Grippers: Grasp square and rectangular parts easily.
3.2.8. Multiple Fingered Grippers
¥ That possesses the general anatomy ofa human hand.
¥ Enables effective simultaneous executions of more than two different jobs.
Y Design methods for each individual gripper in a multi gripper system are
subject to those of single gripper system subject to those of single grippers.
Y A multiple-gripper system is one that has a single robot arm but two of more
grippers or end-of-arm tools which can be used interchangeably on the
manufacturing process in the cell.
¥ These multiple tooling systems can be completely separate grippers ot tools
mounted to the fixture on the end of the robot arm.
¥ The tooling pictured in Figure 3.7 shows six pneumatic grippers with «
combination of two, three, and four jaws to handle many tasks.
|
Multiple fingered grippers
End-Effeetors 3.1
Advantages
I. Reduced in work process time for part
2. The robot arm and controls are used morc efficiently.
3.2.9. Standard Gripper
¥ The standard grippers are commercially available, thus reducing the need to
custom-design a gripper for cach separate robot application.
3.2.10. Expandable Grippers
¥ Expandable grippers are two types:
1. Interior susie
2. Exterior grasping.
¥ Hollow rubber envelope expands when pressurized to grasp object.
¥ Evenly distributed pressure surface
3.2.11. Internal Gripper
¥ In these grippers; the finger pads are mounted on the outside of the fingers.
Y This mounting allows the pads to fit into the inside diameter of the part that it
must lift. The pads are pressed against the inside walls of the part.
¥ The frictional force developed allows the fingers to hold the part securely when
the gripper lifts the part.
W The contact may be either two-point contact or captivation or flexible, grip with
polyurethane pads.
Finger pads
Fig. 3.8. Internal Gripper
3.12 Rol
4
3.2.42. External Gripper
¥ This type of gripper is designed so that the finger pads press against the
of the component. -
¥ Grips the exterior surface of the objects with closed finger.
¥ The pads develop the frictional force required to lift the part. The pads are
of polyurethane bonded to steel.
Y These grippers are generally of four-point contact V-block type.
v External grippers are shown in Fig.3.9.
Finger pads |
3.3. COLLECT GRIPPERS
“¥ Collect grippers are used to pick and place cylindrical parts that are unifor
size,
¥ Pneumatic Collect Grippers are designed for the precise picking and placi
parts that are uniform in size, 360° of clamping contact.
Y A precision collect is enclosed in a housing that is tapered to conform to
outside diameter of the collect.
¥ The collect is linked to a double-acting piston and as the piston actuates.
collect is forced to either “open & extend” or “close & retract.”
¥ Collect Grippers are best suited for applications where production parts
tight tolerances since collets are precisely manufactured for a particular
dimension
Y Collect grippers are suitable for round, square or hexagonal shapes.
End-Effectors
Assumptions used to determine maximum payload
00 psi (6.9 bar)
— Maximum Acceleration/Deceleration = 1G - 386 in/s* (9.8 m/s?)
— Part Friction (11) = 0.25
— System Pressure
3.4, THE VACUUM GRIPPEB 2.
The vacuum gripper hiéstwo components:
(a) The vacuum gripper cups
(6) The vacuum system
¥ The vacuum cups consist of a flexible-rubber cup and a hard-rubber cup.
¥ Cups are made of elastic itaterial and round in shape.
Y The cup creates negative pressure, which in tur, create the vacuum and the
necessary lifting power.
Y The vacuum is created between cup and the object.
¥ The vacuum can be generated by a vacuum pump or a venturi system. After
lifting and placing the part at the desired place the vacuum is released.
¥ Number of grippers (cups) determines the size and weight of object to be
grasped.
¥ Vacuum gripper is used for handling of fragile parts.
¥ Positioning of parts not as critical as with other grippers,
~ In some applications where the objects are too thin to be handled, they can be
held by vacuum grippers.
~ Fig.3.10 illustrates Vacuum gripper.
~ The lifting capacity of suction pump depends upon the effective area of the cup
and negative air pressure (vacuum) between the cup and the object.
3.14 Roi
Ai out
a
(a) Ventury device for flat surface gripping (b) Gripper for contoured surface
Fig, 3.10. The vacuum gripper
Uses of Vacuum Grippers
Y Itis used for picking of metal parts and large light weight boxes.
Lift Capacity of Suction Pump.
Lift capacity of suction pump depends upon:
1, Effective area of the cup.
2. Negative air pressure between cup and object.
Force (F) = K-p+Agg = K+ Aur Py
where, F = Lift capacity (Newton)
K = Coefficient
Aug = Effective area
p = Negative pressure
P, ~ Atmospheric pressure
Pro; = Residual pressure in vacuum cup
End-Effectors
[3.15
Manipulator
west
Monipuiater
wrist
Vacuum cup
Vacuum
nese
— Port
() Dual gripper (8) Single gripper
Rack and pinion drive
Intermeshing teeth to each jaw
©
@)
Fig. 3.11. Single grippers and Dual vacuum grip
ers
Advantages
|. The Gripper is lighter in weight.
2. Distribute the pressure entirely in some area,
Disadvantages
1. Itis not suitable for components having curved surface and holes.
2. More time is required to build the vacuum in the cup.
3.5. MAGNETIC GRIPPERS,
Grippers in which a magnetic substance performs the
grasping action for handling
ferrous material are called magnetic grippers.
3.16 Robotics)
The types of magnetic grippers are:
_4@) Electromagnetic grippers
(i) Permanent magnet grippers
3.5.1. Permanent Magnet Type Grippers
Y The magnetic gripper employs the effect of a magnetic field coming i
contact with a ferrous metal.
W The magnetic field is developed by passing constant current through
electromagnet.
¥ The Fig.3.12 illustrates permanent magnet type magnetic gripper.
|
re
plate
|
|
ano |
Fig. 3. 22. Magnetic gripper — Permanent magnet type
¥ This field causes the molecules of the ferrous metal to align and de
smaller magnetic fields in the part.
¥ These smaller magnetic fields have a polarity that is opposite to the polarity
the electromagnetic field. The two poles of opposite polarity attract each of
allowing the gripper to lifi the part.
¥ The electric current is turned off after the part has been lifted and placed at
desired place.
Advantage:
Vv Variety of part size can be handled.
¥ Pickup times are very fast.
¥ Variations in part size can be tolerated.
¥ The grippers do not have to be designed for one particular work part.
¥ They have the ability to handle metal parts with holes.
Ena-Effectors
~ Requires only one surface for gripping.
"A magnetic gripper, despite in compact size, can sustain enormous holding
power,
Desadvantage:
© Residual magnetism remaining in the workpiece may cause problems.
Y Side slippage.
~ More than one sheet will be lifted by the magnet from a stack.
~ Lack of control during some duration of the cycle.
25. ELECTROMAGNETIC GRIPPERS
CIV YY &e
|
Fig. 3.13. Electromagnetic Strippers
” Electromagnetic grippers can be employed for holding
Vous aimerez peut-être aussi
- Quiz 2Document1 pageQuiz 2Ravi TripathiPas encore d'évaluation
- Mae5230 CFD Intro Notes PDFDocument17 pagesMae5230 CFD Intro Notes PDFDebabrata PaulPas encore d'évaluation
- Me 660Document2 pagesMe 660DHINAKARANVEEMANPas encore d'évaluation
- CamScanner Scans PDFs QuicklyDocument4 pagesCamScanner Scans PDFs QuicklyRavi TripathiPas encore d'évaluation
- News PDFDocument12 pagesNews PDFRichard JonesPas encore d'évaluation
- Practice Problems - Section-I F PDFDocument5 pagesPractice Problems - Section-I F PDFTushar KalamkarPas encore d'évaluation
- Keybed2022Document2 pagesKeybed2022Ravi TripathiPas encore d'évaluation
- Student Marking SchemeDocument1 pageStudent Marking SchemeRavi TripathiPas encore d'évaluation
- Feedback Evaluation SheetDocument5 pagesFeedback Evaluation SheetRavi TripathiPas encore d'évaluation
- My Courses Quiz 1 Plagiarism DashboardDocument5 pagesMy Courses Quiz 1 Plagiarism DashboardRavi TripathiPas encore d'évaluation
- Differential Geometry Project TopicsDocument2 pagesDifferential Geometry Project TopicsRavi TripathiPas encore d'évaluation
- Euler Angles From Rotation MatrixDocument7 pagesEuler Angles From Rotation MatrixRaja Amer AzimPas encore d'évaluation
- Prime Integrals in Relativistic Celestial Mechanics: Vittorio BanfiDocument10 pagesPrime Integrals in Relativistic Celestial Mechanics: Vittorio BanfiRavi TripathiPas encore d'évaluation
- UGC NET Paper 1 Data InterpretationDocument17 pagesUGC NET Paper 1 Data InterpretationRavi TripathiPas encore d'évaluation
- Information Brochure 2nd Semester 2020-21Document32 pagesInformation Brochure 2nd Semester 2020-21Prabal AcharyaPas encore d'évaluation
- Computing Wrench Cones For Planar Rigid Body Contact TasksDocument16 pagesComputing Wrench Cones For Planar Rigid Body Contact TasksRavi TripathiPas encore d'évaluation
- DelcylDocument5 pagesDelcylLee Shin LeongPas encore d'évaluation
- Honey FlowDocument4 pagesHoney FlowRavi TripathiPas encore d'évaluation
- Self Drainage of Viscous Fluids Through Pipes PDFDocument13 pagesSelf Drainage of Viscous Fluids Through Pipes PDFRavi TripathiPas encore d'évaluation
- News PDFDocument12 pagesNews PDFRichard JonesPas encore d'évaluation
- Gibbs Phase Rule DerivationDocument6 pagesGibbs Phase Rule DerivationRavi Tripathi100% (1)
- Self Drainage of Viscous Fluids Through Pipes PDFDocument13 pagesSelf Drainage of Viscous Fluids Through Pipes PDFRavi TripathiPas encore d'évaluation
- Quantitative AptitudeDocument2 pagesQuantitative AptitudeSivakumar MPas encore d'évaluation
- Chemical and Hazardous Materials SafetyDocument38 pagesChemical and Hazardous Materials SafetyardodotPas encore d'évaluation
- Measurment SystemsDocument6 pagesMeasurment Systemssbos1Pas encore d'évaluation
- Gatepsu - in Ethics Latest MadeEasy Notes PDFDocument74 pagesGatepsu - in Ethics Latest MadeEasy Notes PDFRavi TripathiPas encore d'évaluation
- FlowDocument105 pagesFlowretheepPas encore d'évaluation
- Turn On The Human Calculator in You PDFDocument33 pagesTurn On The Human Calculator in You PDFprvn301180% (5)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)