Vous aimerez peut-être aussi
- The PIC Microcontroller: Your Personal Introductory CourseD'EverandThe PIC Microcontroller: Your Personal Introductory CourseÉvaluation : 1 sur 5 étoiles1/5 (2)
- 02 - Introduction To The NI LabVIEW Control Design and Simulation Module PDFDocument61 pages02 - Introduction To The NI LabVIEW Control Design and Simulation Module PDFkishan1234Pas encore d'évaluation
- PLC & Scada ContentsDocument2 pagesPLC & Scada ContentsQasim JuttPas encore d'évaluation
- Flyer Panel-Meters Engl 01Document8 pagesFlyer Panel-Meters Engl 01Pop-Coman SimionPas encore d'évaluation
- MEC522 PBL ArduinoDC MotorEncoder Close LoopDocument4 pagesMEC522 PBL ArduinoDC MotorEncoder Close LoopeimanPas encore d'évaluation
- Universal Process Controller ABB CMF310Document24 pagesUniversal Process Controller ABB CMF310An Jr VerPas encore d'évaluation
- SEI 4123 Applications of Robust ControlDocument85 pagesSEI 4123 Applications of Robust ControlMamoon SmadiPas encore d'évaluation
- Please Give Me Your Comment in This Presentation 1639101925Document79 pagesPlease Give Me Your Comment in This Presentation 1639101925Adith Wiendar P PutraPas encore d'évaluation
- Submitted by Ahmed Khairy Jrnaz Alaaddin Khaled Alazzabi Supervised By: Mahmud SasiDocument12 pagesSubmitted by Ahmed Khairy Jrnaz Alaaddin Khaled Alazzabi Supervised By: Mahmud SasiAhmed K JirnazPas encore d'évaluation
- Fuzzy ControlDocument37 pagesFuzzy Controltecav94114Pas encore d'évaluation
- Fuzzy Logic Control: Lect 6 Fuzzy PID ControllerDocument43 pagesFuzzy Logic Control: Lect 6 Fuzzy PID ControllerRahul SharmaPas encore d'évaluation
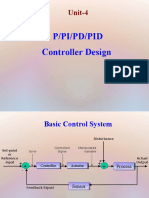
- P/Pi/Pd/Pid Controller Design: Unit-4Document39 pagesP/Pi/Pd/Pid Controller Design: Unit-4harish9Pas encore d'évaluation
- Fuzzy Module 2Document38 pagesFuzzy Module 2Abel AbelPas encore d'évaluation
- Control 101 The Process Control Loop Controllers, Types of ControlDocument59 pagesControl 101 The Process Control Loop Controllers, Types of ControlGigi SalesPas encore d'évaluation
- Project Case - Smart SewingDocument18 pagesProject Case - Smart SewingRksPas encore d'évaluation
- EH2741 HT16 Lecture 5 PDFDocument25 pagesEH2741 HT16 Lecture 5 PDFNiels Romanovich RomanovPas encore d'évaluation
- Automation in Industrial Applications: Izabella GEAPANA, Toader SERETAN October 09, 2020Document83 pagesAutomation in Industrial Applications: Izabella GEAPANA, Toader SERETAN October 09, 2020Ștefan KișPas encore d'évaluation
- TroubleshootingDocument39 pagesTroubleshootingTrí NguyễnPas encore d'évaluation
- Programmable Logic Controller (PLC) : by - Er - Arabinda MohantyDocument15 pagesProgrammable Logic Controller (PLC) : by - Er - Arabinda MohantySachidananda SwarPas encore d'évaluation
- Distributed Control System (DCS)Document96 pagesDistributed Control System (DCS)Abdul RawoofPas encore d'évaluation
- Full Control at Your Finger Tips: UT55A/UT52A/UT35A/UT32A UP55A/UP35A UM33ADocument20 pagesFull Control at Your Finger Tips: UT55A/UT52A/UT35A/UT32A UP55A/UP35A UM33AAPOLINAR GARCÍA OTINIANOPas encore d'évaluation
- Fuzzy LogicDocument5 pagesFuzzy LogicRafida NariswariPas encore d'évaluation
- Principles Of: Scada SystemDocument12 pagesPrinciples Of: Scada SystemUpink CurryPas encore d'évaluation
- Crash Course On Control: Karl-Erik ÅrzénDocument113 pagesCrash Course On Control: Karl-Erik ÅrzénswatkoolPas encore d'évaluation
- Programmazione Semplificata Per NI CompactRIO: Function Block (Compatibili IEC-61131), Scan Engine e Distributed System ManagerDocument23 pagesProgrammazione Semplificata Per NI CompactRIO: Function Block (Compatibili IEC-61131), Scan Engine e Distributed System ManagerNational Instruments ItalyPas encore d'évaluation
- What Is PID ControllerDocument3 pagesWhat Is PID ControllerVraja DasiPas encore d'évaluation
- Platform Independent Functional SpecificationsDocument19 pagesPlatform Independent Functional SpecificationsVikas PhatakPas encore d'évaluation
- Project Case - Smart SewingDocument18 pagesProject Case - Smart Sewingsivanesan rajamanickamPas encore d'évaluation
- Internet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameDocument27 pagesInternet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameMAFOQ UL HASSANPas encore d'évaluation
- PID Controller Design Process: EEC 414 Wri4ng For Electrical and Computer EngineeringDocument11 pagesPID Controller Design Process: EEC 414 Wri4ng For Electrical and Computer Engineeringfastidious_5Pas encore d'évaluation
- Diagmaster InstructionDocument56 pagesDiagmaster InstructionJarek FedkoPas encore d'évaluation
- Programmable Logic Controllers (PLCS) For Automation and Process ControlDocument2 pagesProgrammable Logic Controllers (PLCS) For Automation and Process ControlYashveer TakooryPas encore d'évaluation
- Manufacturing Automation Lecture 2Document38 pagesManufacturing Automation Lecture 2Kashan Aamir Aamir IshaqPas encore d'évaluation
- Pid Controls PLC EnvironDocument22 pagesPid Controls PLC EnvironAbhinav GuptaPas encore d'évaluation
- PID Furnace Temp ControlDocument11 pagesPID Furnace Temp ControlashishPas encore d'évaluation
- PIN: Intel's Dynamic Binary Instrumentation EngineDocument14 pagesPIN: Intel's Dynamic Binary Instrumentation EngineMuzafarPas encore d'évaluation
- Automation and Control Engineering (R17A0327) : 4 Year B. Tech I-Sem, Mechanical EngineeringDocument20 pagesAutomation and Control Engineering (R17A0327) : 4 Year B. Tech I-Sem, Mechanical EngineeringJEYAVEL PALANISAMYPas encore d'évaluation
- MT ConnectDocument61 pagesMT ConnectMagesh SundaramPas encore d'évaluation
- 32 Digital ControllersDocument25 pages32 Digital ControllersKARTHIK S SPas encore d'évaluation
- Fuzzy Module 2Document38 pagesFuzzy Module 2bkhoanvuPas encore d'évaluation
- 05 Introduction PID Controller DesignDocument22 pages05 Introduction PID Controller DesignAhtisham195Pas encore d'évaluation
- Process Control & Instrumentation: Pid ControllerDocument15 pagesProcess Control & Instrumentation: Pid ControllerDozdi100% (2)
- Establishing A Model Flow Cell: Trident Business SystemDocument15 pagesEstablishing A Model Flow Cell: Trident Business SystemAnkurPas encore d'évaluation
- IoT Week1 Day2 LectureDocument26 pagesIoT Week1 Day2 LectureHasan A.T.M.Pas encore d'évaluation
- Control Solutions: Q8 High-Performance H.I.L. Control BoardDocument2 pagesControl Solutions: Q8 High-Performance H.I.L. Control BoardMonowar HasanPas encore d'évaluation
- Receiving Elements: Instrumentation & ControlDocument47 pagesReceiving Elements: Instrumentation & ControlSka dooshPas encore d'évaluation
- Controlmaster Cm30: Universal Process Controller, 1/4 DinDocument24 pagesControlmaster Cm30: Universal Process Controller, 1/4 DinRuben Checalla RamosPas encore d'évaluation
- An Introduction To PLCsDocument38 pagesAn Introduction To PLCsBill KalistoPas encore d'évaluation
- 1 - 1 - IntroducaoDocument31 pages1 - 1 - IntroducaoAndré GomesPas encore d'évaluation
- Chapter 1 - Introd@Document48 pagesChapter 1 - Introd@muhammad izzulPas encore d'évaluation
- PCT100 PL0214Document2 pagesPCT100 PL0214Wael AhmedPas encore d'évaluation
- Drive Test AnalysisDocument61 pagesDrive Test AnalysisSABER1980Pas encore d'évaluation
- PID ControlDocument32 pagesPID ControlSyamil RahmanPas encore d'évaluation
- Instrumentation and Control SeriesDocument4 pagesInstrumentation and Control SeriesObayomi KennyPas encore d'évaluation
- PIN: Intel's Dynamic Binary Instrumentation Engine: Pin Is Not An AcronymDocument4 pagesPIN: Intel's Dynamic Binary Instrumentation Engine: Pin Is Not An AcronymMuzafarPas encore d'évaluation
- Chicago Automation and Energy Efficiency of Industrial Refrigeration Systems en 1583972Document24 pagesChicago Automation and Energy Efficiency of Industrial Refrigeration Systems en 1583972kkmarus9837Pas encore d'évaluation
- Analysis within the Systems Development Life-Cycle: Book 4 Activity Analysis—The MethodsD'EverandAnalysis within the Systems Development Life-Cycle: Book 4 Activity Analysis—The MethodsPas encore d'évaluation
- Practical Data Acquisition for Instrumentation and Control SystemsD'EverandPractical Data Acquisition for Instrumentation and Control SystemsPas encore d'évaluation
- GMS 250 7 3 en 4FWDocument46 pagesGMS 250 7 3 en 4FWFlorin ZahariaPas encore d'évaluation
- ProjectDocument106 pagesProjectnesemohankumarPas encore d'évaluation
- 8BitDo Pro 2 Bluetooth Gamepad User ManualDocument1 page8BitDo Pro 2 Bluetooth Gamepad User ManualДмитрий ВоробьевPas encore d'évaluation
- Organization Change Management & Software Configuration ManagementDocument14 pagesOrganization Change Management & Software Configuration ManagementqasemkhanPas encore d'évaluation
- A Brief History of Programming LanguagesDocument46 pagesA Brief History of Programming LanguagesZahir B. FareedPas encore d'évaluation
- Ovirt and Gluster Hyper-Converged!: Ha Solution For Maximum Resource UtilizationDocument30 pagesOvirt and Gluster Hyper-Converged!: Ha Solution For Maximum Resource UtilizationFernando Ferrer GarciaPas encore d'évaluation
- Microsoft Excel Shortcuts For MAC PDFDocument6 pagesMicrosoft Excel Shortcuts For MAC PDFJASMER SINGH 1611118Pas encore d'évaluation
- 3352 PDFDocument6 pages3352 PDFMSPas encore d'évaluation
- Types of Eda Tool SetDocument9 pagesTypes of Eda Tool SetLaxmanaa GajendiranPas encore d'évaluation
- Tai Lieu PopDocument115 pagesTai Lieu PopBích Ngọc100% (1)
- DatashettDocument94 pagesDatashettBinh Phan TranPas encore d'évaluation
- MLPerf - Vision Behind MLPerfDocument62 pagesMLPerf - Vision Behind MLPerfJack PurcherPas encore d'évaluation
- MicroBeta Instrument Manual BsDocument322 pagesMicroBeta Instrument Manual Bsnabil160874Pas encore d'évaluation
- Fa5590n Fa5591nDocument21 pagesFa5590n Fa5591nАлександр АндриановPas encore d'évaluation
- Inductive Sensor BI1.5-EG08K-Y1: Type DesignationDocument5 pagesInductive Sensor BI1.5-EG08K-Y1: Type DesignationpinkpanterPas encore d'évaluation
- Data Sheet 6GT2002-1JD00: Transmission RateDocument3 pagesData Sheet 6GT2002-1JD00: Transmission RaterenjithPas encore d'évaluation
- مجموعة من اعطال الشاشات وطريقة صيانتها 4Document209 pagesمجموعة من اعطال الشاشات وطريقة صيانتها 4adda chariPas encore d'évaluation
- CPAP - Applications - Medical - Microchip Technology Inc - PDFDocument3 pagesCPAP - Applications - Medical - Microchip Technology Inc - PDFRene Gonzales Vasquez100% (1)
- Revision Sheet Class 4Document5 pagesRevision Sheet Class 4PPPas encore d'évaluation
- AOC V22tDocument2 pagesAOC V22trashikakaranPas encore d'évaluation
- Platform Technologies Module 2Document57 pagesPlatform Technologies Module 2Christian KingawPas encore d'évaluation
- Solaris 11 Administration - Student Guide2Document376 pagesSolaris 11 Administration - Student Guide2Adil El Msieh100% (2)
- CMOS Variable Gain Amplifier: A 1.8-V 73-dB Dynamic-RangeDocument4 pagesCMOS Variable Gain Amplifier: A 1.8-V 73-dB Dynamic-Rangeapi-19755952Pas encore d'évaluation
- CiscoDocument35 pagesCiscoFlorin Zamfir100% (1)
- Boq ServerDocument2 pagesBoq ServerHasnat Nahid HimelPas encore d'évaluation
- Replacing 3174Document66 pagesReplacing 3174BillcPas encore d'évaluation
- BOOK Laptop Motherboard Fault FinderDocument85 pagesBOOK Laptop Motherboard Fault FinderServis Accu83% (6)
- Nominal Load-Moment Strength Interaction Diagram PDFDocument96 pagesNominal Load-Moment Strength Interaction Diagram PDFBhavin ShahPas encore d'évaluation
- Internet Explorer 7 Keyboard ShortcutsDocument2 pagesInternet Explorer 7 Keyboard ShortcutsConstantinus MagnusPas encore d'évaluation
- Inspection Programs For Internal Corrosion in PipingDocument6 pagesInspection Programs For Internal Corrosion in PipingsajimaliPas encore d'évaluation