Vous aimerez peut-être aussi
- Analisis Punto 4Document4 pagesAnalisis Punto 4Edupo PalacioPas encore d'évaluation
- TECNIC1Document60 pagesTECNIC1Joseph007bstPas encore d'évaluation
- 3G24GDocument93 pages3G24GInes Martha Villca UgartePas encore d'évaluation
- Capitulo 2Document18 pagesCapitulo 2Redfield ClairePas encore d'évaluation
- Diferencias y Similitudes Entre Las Redes 3G 4G 5GDocument6 pagesDiferencias y Similitudes Entre Las Redes 3G 4G 5GEdupo PalacioPas encore d'évaluation
- Documento Modernizacion Redes Moviles 1Document108 pagesDocumento Modernizacion Redes Moviles 1Julio RodriguezPas encore d'évaluation
- Proyecto 3GPP para La Arquitectura de La TecnologíaDocument7 pagesProyecto 3GPP para La Arquitectura de La TecnologíaEdupo PalacioPas encore d'évaluation
- Explicación Laboratorio Fase 2 Antenas y Propagación PDFDocument8 pagesExplicación Laboratorio Fase 2 Antenas y Propagación PDFEdupo PalacioPas encore d'évaluation
- Continuacion de Ejercicio 2Document2 pagesContinuacion de Ejercicio 2Edupo PalacioPas encore d'évaluation
- Antenas y Propagación LaboratoriosDocument59 pagesAntenas y Propagación LaboratoriosEdupo Palacio100% (1)
- Ingles TareaDocument2 pagesIngles TareaEdupo PalacioPas encore d'évaluation
- 15 Dinámicas de Trabajo en EquipoDocument14 pages15 Dinámicas de Trabajo en EquipoEdupo Palacio100% (1)
- Redes Celular Es in A Lamb Ric AsDocument91 pagesRedes Celular Es in A Lamb Ric AsMarta VargasPas encore d'évaluation
- 8.3.3.6 Lab - Configuring Basic Single-Area OSPFv3Document50 pages8.3.3.6 Lab - Configuring Basic Single-Area OSPFv3Edupo PalacioPas encore d'évaluation
- Ingles Tradiciones BizarrasDocument4 pagesIngles Tradiciones BizarrasEdupo PalacioPas encore d'évaluation
- 10.2.3.5 Lab - Configuring Stateless and Stateful DHCPv6 PDFDocument15 pages10.2.3.5 Lab - Configuring Stateless and Stateful DHCPv6 PDFKarina SantillanPas encore d'évaluation
- 8.3.3.6 Lab - Configuring Basic Single-Area OSPFv3Document50 pages8.3.3.6 Lab - Configuring Basic Single-Area OSPFv3Edupo PalacioPas encore d'évaluation
- Aporte 2 PracticaDocument3 pagesAporte 2 PracticaEdupo PalacioPas encore d'évaluation
- Mia PlantaDocument35 pagesMia PlantaAdolfo Gomez MoralesPas encore d'évaluation
- Ejercicio 3Document5 pagesEjercicio 3Edupo PalacioPas encore d'évaluation
- Procesamiento de Señales Digitales Duban PalacioDocument10 pagesProcesamiento de Señales Digitales Duban PalacioEdupo PalacioPas encore d'évaluation
- Microondas Presaberes PDFDocument8 pagesMicroondas Presaberes PDFEdupo PalacioPas encore d'évaluation
- Ejercicio 3Document5 pagesEjercicio 3Edupo PalacioPas encore d'évaluation
- Planos Estructural Del Edificio A Implementar La Red TelemáticaDocument6 pagesPlanos Estructural Del Edificio A Implementar La Red TelemáticaEdupo PalacioPas encore d'évaluation
- Mantenimiento y Calidad en La RedDocument15 pagesMantenimiento y Calidad en La RedEdupo PalacioPas encore d'évaluation
- Tema No 2Document21 pagesTema No 2Edupo PalacioPas encore d'évaluation
- Planos Estructural Del Edificio A Implementar La Red TelemáticaDocument6 pagesPlanos Estructural Del Edificio A Implementar La Red TelemáticaEdupo PalacioPas encore d'évaluation
- Proyecto e ImplementaciónDocument2 pagesProyecto e ImplementaciónEdupo PalacioPas encore d'évaluation
- Consolidado Senales y SistemasDocument4 pagesConsolidado Senales y SistemasEdupo PalacioPas encore d'évaluation
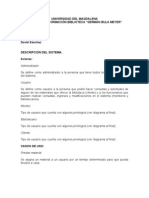
- Biblioteca German Bula Meyer - UnimagdalenaDocument4 pagesBiblioteca German Bula Meyer - Unimagdalenadsanva2004Pas encore d'évaluation
- Aguas Acidas en MineriaDocument22 pagesAguas Acidas en MineriaTerrones DE Azucar100% (1)
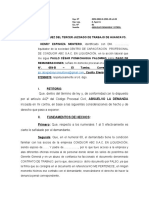
- Absolución de Demanda de Conducir AbcDocument4 pagesAbsolución de Demanda de Conducir AbcJuan José Carrasco EspinozaPas encore d'évaluation
- Libros Seniat 2022Document3 pagesLibros Seniat 2022Nahum96% (23)
- Técnicas de Sondeo de Puertos Con NmapDocument14 pagesTécnicas de Sondeo de Puertos Con NmapCarlos Alberto Borda DonairePas encore d'évaluation
- Cubierta PlanaDocument2 pagesCubierta PlanaIvanaPas encore d'évaluation
- Valoracioncontingente PDFDocument34 pagesValoracioncontingente PDFBRISA NAGHELY GARECA VELASQUEZPas encore d'évaluation
- Guia de Actividades y Rubrica de Evaluacion - Fase 4 - Diagnostico Participativo Contextualizado e Informe PsicologicoDocument7 pagesGuia de Actividades y Rubrica de Evaluacion - Fase 4 - Diagnostico Participativo Contextualizado e Informe PsicologicoMarly DuartePas encore d'évaluation
- Informe Del Estudio de Evaluación de Riesgos Disergonómicos - IEQSA-aDocument70 pagesInforme Del Estudio de Evaluación de Riesgos Disergonómicos - IEQSA-aCarlos MagallanesPas encore d'évaluation
- Tema 8 Poder, Conflicto y NegociacionDocument16 pagesTema 8 Poder, Conflicto y NegociacionwebinarPas encore d'évaluation
- 001az019a Es XDocument34 pages001az019a Es XJhesus Lucena100% (2)
- Taller 2 Ing - EcoDocument3 pagesTaller 2 Ing - EcoYULITZA STEFANIA CUBILLOS RODRIGUEZPas encore d'évaluation
- PAT 2019-2020 Zona 24Document62 pagesPAT 2019-2020 Zona 24Tere HedzPas encore d'évaluation
- Informe#4Document8 pagesInforme#4Yana Iris Maldonado CastroPas encore d'évaluation
- Banco de Preguntas - Modelamiento de Base de DatosDocument10 pagesBanco de Preguntas - Modelamiento de Base de DatosAlexanderRamosPas encore d'évaluation
- Diligencias Voluntarias de DivorcioDocument3 pagesDiligencias Voluntarias de DivorcioManuel EduardoPas encore d'évaluation
- Vizcarra Zegarra Induliz ReynaDocument2 pagesVizcarra Zegarra Induliz ReynaLuis Angel Huarachi GonzalesPas encore d'évaluation
- DescargaDocument10 pagesDescargaNatoore InfoPas encore d'évaluation
- Precios Estimados SHCP VehiculosDocument29 pagesPrecios Estimados SHCP VehiculosgalazlicPas encore d'évaluation
- Trabajo de Redaccion de TestamentosDocument14 pagesTrabajo de Redaccion de TestamentosZayonara Zambrano PitrePas encore d'évaluation
- Informe Ciclos de Potencia de GasDocument13 pagesInforme Ciclos de Potencia de GasALEJANDRA MENESESPas encore d'évaluation
- Presentación 1 XDocument3 pagesPresentación 1 XJose Luis Moreno VegaPas encore d'évaluation
- Guia Manejo de Residuos BiologicosDocument31 pagesGuia Manejo de Residuos BiologicosPatt CarvelPas encore d'évaluation
- FYADGS00065 R0 (Adjunto) Check List PulidorDocument1 pageFYADGS00065 R0 (Adjunto) Check List PulidorJulian Avila MaruriPas encore d'évaluation
- Acumulador (Piloto) - Probar y CargarDocument13 pagesAcumulador (Piloto) - Probar y CargarWilmer Huingo VargasPas encore d'évaluation
- Modificación Del Escape de Clavijas. Enrique BuenoDocument14 pagesModificación Del Escape de Clavijas. Enrique BuenorhgnicanorPas encore d'évaluation
- Primer Mensaje A La Legislatura Del Gobernador Amadeo Sabattini 1936Document12 pagesPrimer Mensaje A La Legislatura Del Gobernador Amadeo Sabattini 1936Marcos FunesPas encore d'évaluation
- Manual Reparacion Albanileria PDFDocument35 pagesManual Reparacion Albanileria PDFHenry López SotoPas encore d'évaluation
- Ee FFDocument17 pagesEe FFMaricela Laureano RaquiPas encore d'évaluation
- Medicion de Nivel de Liquidos y Solidos 1Document2 pagesMedicion de Nivel de Liquidos y Solidos 1Cristian BalceiroPas encore d'évaluation