Vous aimerez peut-être aussi
- UF1253 - Diagnóstico de deformaciones estructuralesD'EverandUF1253 - Diagnóstico de deformaciones estructuralesPas encore d'évaluation
- PracticaDocument7 pagesPracticaLeonardoPas encore d'évaluation
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasD'EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasÉvaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Laboratorio 1Document13 pagesLaboratorio 1ELIAN EDMUNDO ARENAS YATACOPas encore d'évaluation
- Ejercicios de Integrales de Línea, Superficie y VolumenD'EverandEjercicios de Integrales de Línea, Superficie y VolumenÉvaluation : 4 sur 5 étoiles4/5 (2)
- 203041-1 - Fase 3 - David BolañoDocument19 pages203041-1 - Fase 3 - David BolañodabPas encore d'évaluation
- Control neuronal y difuso para sistemas fotovoltaicosD'EverandControl neuronal y difuso para sistemas fotovoltaicosPas encore d'évaluation
- Práctica 3 - Contador DescendenteDocument16 pagesPráctica 3 - Contador DescendenteUES ALANPas encore d'évaluation
- Informe Final LevitadorDocument9 pagesInforme Final LevitadorPipe AriasPas encore d'évaluation
- Proyecto Control Balancin PIDDocument34 pagesProyecto Control Balancin PIDRenéSergioEspejoGutiérrez100% (2)
- Proyecto CT II 20201 PDFDocument9 pagesProyecto CT II 20201 PDFDaniel BoteroPas encore d'évaluation
- Control Pid DigitalDocument4 pagesControl Pid Digitalfranklin romeroPas encore d'évaluation
- Pid Pendulo InvertidoDocument12 pagesPid Pendulo InvertidoAndres Castro VacaPas encore d'évaluation
- Control PID Temperatura ValvulaDocument18 pagesControl PID Temperatura ValvulaLuis FonsecaPas encore d'évaluation
- Practicas ControlDocument11 pagesPracticas ControlFreddy RosasPas encore d'évaluation
- Sist Control Ii If 3Document12 pagesSist Control Ii If 3Joel IparraguirrePas encore d'évaluation
- Práctica 9.1 - Controladores PIDDocument4 pagesPráctica 9.1 - Controladores PIDJimmy Arias (JimmyStron)Pas encore d'évaluation
- LABORATORIO #7-Sintonización de Un PIDDocument13 pagesLABORATORIO #7-Sintonización de Un PIDMaicol AcostaPas encore d'évaluation
- Sistema de Control de Posición de Bola y Barra Empleando Labview PDFDocument8 pagesSistema de Control de Posición de Bola y Barra Empleando Labview PDFAbraham JaimePas encore d'évaluation
- Informe Practica N°2Document11 pagesInforme Practica N°2JOSE ELIAS HUARCAYA CAJIALLAPas encore d'évaluation
- Romero Control Difuso 2Document12 pagesRomero Control Difuso 2Ronald RomeroPas encore d'évaluation
- Diseño e Implementación de Un Controlador Pid Análogo para Un Motor UniversalDocument7 pagesDiseño e Implementación de Un Controlador Pid Análogo para Un Motor Universalhhryc7Pas encore d'évaluation
- Control PID temperatura simuladoDocument6 pagesControl PID temperatura simuladoGeovanny SatamaPas encore d'évaluation
- RetrieveDocument79 pagesRetrieveYesi NievasPas encore d'évaluation
- Laboratorio2 Control2Document23 pagesLaboratorio2 Control20632021011Pas encore d'évaluation
- Uso de SISOTOOL para Diseño de ControlesDocument35 pagesUso de SISOTOOL para Diseño de ControlesFernando Uzategui GutierrezPas encore d'évaluation
- Proyecto-Corto-Pamh ProyectoCorto I 2020 PAMHDocument5 pagesProyecto-Corto-Pamh ProyectoCorto I 2020 PAMHJorge Rodríguez EsquivelPas encore d'évaluation
- Trabajo Final (Pendulo de Furuta) - Control Automatico IIDocument21 pagesTrabajo Final (Pendulo de Furuta) - Control Automatico IIAnthonny Monrroy RodriguezPas encore d'évaluation
- Informe ControlDocument4 pagesInforme Controldavid idroboPas encore d'évaluation
- Tarea Semana 3 Control IiDocument12 pagesTarea Semana 3 Control IiJahir MontoyaPas encore d'évaluation
- Tarea 5 - Articulo Sistemas de Control AnalogosDocument10 pagesTarea 5 - Articulo Sistemas de Control Analogoswillian mendozaPas encore d'évaluation
- Pid Ziegler NicholsDocument5 pagesPid Ziegler NicholsSebastian Felipe RodriguezPas encore d'évaluation
- Informe Balancin 1.0Document43 pagesInforme Balancin 1.0Moises Cruz Mostacedo100% (1)
- Informe de Laboratorio Sistemas Avanzados Neumaticos (4) (Reparado)Document3 pagesInforme de Laboratorio Sistemas Avanzados Neumaticos (4) (Reparado)Camila VelasquezPas encore d'évaluation
- Laboratorio - 2 2022Document7 pagesLaboratorio - 2 2022jsofiabeltranPas encore d'évaluation
- Sist Control II If 3Document11 pagesSist Control II If 3Raul CondorPas encore d'évaluation
- TrabajoDocument43 pagesTrabajoDuvier Montoya ArbelaezPas encore d'évaluation
- Control en Tiempo DiscretoDocument9 pagesControl en Tiempo DiscretoMiguel Angel RodriguezPas encore d'évaluation
- Práctica - Análisis y Simulación de Un Sistema Digital Con MatlabDocument8 pagesPráctica - Análisis y Simulación de Un Sistema Digital Con MatlabTobe CabreraPas encore d'évaluation
- Lab 1 Fund. Control - David Fernando MonroyDocument4 pagesLab 1 Fund. Control - David Fernando MonroyDävîd MõnrōyPas encore d'évaluation
- Informe MIP MCDocument9 pagesInforme MIP MCPablo RamirezPas encore d'évaluation
- Informe FinalDocument6 pagesInforme FinalRicardo CampoPas encore d'évaluation
- Control Pid Proyecto FinalDocument4 pagesControl Pid Proyecto Finaljesus daniel amaya vergaraPas encore d'évaluation
- IF7 - Espinoza-CCoyoriDocument24 pagesIF7 - Espinoza-CCoyoriMARIO ALBERTO CCOYORI MENDOZAPas encore d'évaluation
- Feedback 3ADocument12 pagesFeedback 3AYonathan Ortiz Guzman100% (1)
- Info 2 ControlDocument4 pagesInfo 2 Controlgermaynne freirePas encore d'évaluation
- Segundo AvanceDocument7 pagesSegundo Avancemorenomagda028Pas encore d'évaluation
- Reactor CSTRDocument17 pagesReactor CSTRhennyPas encore d'évaluation
- Tema 67Document12 pagesTema 67Beatriz San José SecoPas encore d'évaluation
- Tema 2 Compensación Francisco Zavala.Document35 pagesTema 2 Compensación Francisco Zavala.Francisco Zavala MadariagaPas encore d'évaluation
- Control industrial: Sistemas de retroalimentaciónDocument12 pagesControl industrial: Sistemas de retroalimentaciónMoña Poblete PizarroPas encore d'évaluation
- 203041-1 - Fase 2 - David BolañoDocument17 pages203041-1 - Fase 2 - David BolañodabPas encore d'évaluation
- Sistemas de ControlDocument39 pagesSistemas de ControlnasierrasPas encore d'évaluation
- Controlador Fuzzy para Péndulo InvertidoDocument11 pagesControlador Fuzzy para Péndulo Invertidomhernadnez134Pas encore d'évaluation
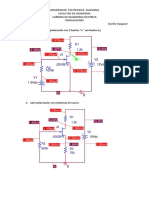
- Formato Presentacion Documentos Normas IeeeDocument5 pagesFormato Presentacion Documentos Normas IeeeDanii PalaciosPas encore d'évaluation
- Laboratorio #7-Sintonización de Un PIDDocument13 pagesLaboratorio #7-Sintonización de Un PIDMaicol AcostaPas encore d'évaluation
- Obtención de Parámetros de Los Controladores PI, PID, Utilizando Diferentes Métodos de SintoníaDocument5 pagesObtención de Parámetros de Los Controladores PI, PID, Utilizando Diferentes Métodos de SintoníaLuisEduardoTkfPas encore d'évaluation
- Laboratorio no.1-IAPCDocument9 pagesLaboratorio no.1-IAPCRoroPas encore d'évaluation
- Informe Final BalancinDocument6 pagesInforme Final BalancinGustavo Adolfo Romero RamirezPas encore d'évaluation
- Cableado EstructuradoDocument9 pagesCableado EstructuradoSantiago BaculimaPas encore d'évaluation
- Información Importante!Document1 pageInformación Importante!Steven RamosPas encore d'évaluation
- Practica 10Document9 pagesPractica 10fer6669993Pas encore d'évaluation
- Polarización Fija SimulacioseDocument3 pagesPolarización Fija SimulacioseCristian uriguenPas encore d'évaluation
- Practica 2Document19 pagesPractica 2Cristian uriguenPas encore d'évaluation
- Circuitos de muestreo y retención S/HDocument4 pagesCircuitos de muestreo y retención S/HCristian uriguen100% (1)
- BachillerDocument56 pagesBachillerSteff Y0% (1)
- EnesDocument33 pagesEnesNapito JativaPas encore d'évaluation
- AcondicionamientoDocument20 pagesAcondicionamientoAndres Jacob Sanchez JaraPas encore d'évaluation
- Controlador Con Observador Mediante Variables de EstadoDocument6 pagesControlador Con Observador Mediante Variables de EstadoCristian uriguenPas encore d'évaluation
- FiltroDocument8 pagesFiltroMaria Valeska Bianchi MartinPas encore d'évaluation
- Guia de Alumno. Prog FPGA PARTE 1Document12 pagesGuia de Alumno. Prog FPGA PARTE 1Cristian uriguenPas encore d'évaluation
- Circuitos SecuencialesDocument20 pagesCircuitos SecuencialesCristian uriguenPas encore d'évaluation
- Tecnologias FPGA PDFDocument3 pagesTecnologias FPGA PDFfer6669993Pas encore d'évaluation
- Control Apuntes 1Document9 pagesControl Apuntes 1fer6669993Pas encore d'évaluation
- CIPDocument4 pagesCIPCristian uriguenPas encore d'évaluation
- DistribuciónDocument8 pagesDistribuciónCristian uriguenPas encore d'évaluation
- Análisis Matrices Rotación TraslaciónDocument12 pagesAnálisis Matrices Rotación TraslaciónCristian uriguenPas encore d'évaluation
- Ensamble, Simulación y Análisis Cinemático Del Robot KUKA KR 5-2 ARC HW.Document23 pagesEnsamble, Simulación y Análisis Cinemático Del Robot KUKA KR 5-2 ARC HW.Cristian uriguen0% (1)
- WordDocument32 pagesWordfragamarcelo@gmail.com100% (1)
- Sesión 5 - Ficha Con EsquemaDocument2 pagesSesión 5 - Ficha Con EsquemaFiorella Aguilar rubioPas encore d'évaluation
- EL VODKA GmoDocument17 pagesEL VODKA GmoRocio Victoria Lechuga LuceroPas encore d'évaluation
- Sistemas de Manufactura Considerando Aspectos de Logisitca InversaDocument24 pagesSistemas de Manufactura Considerando Aspectos de Logisitca Inversaerick benitezPas encore d'évaluation
- Formularios en PDF y ChromeDocument2 pagesFormularios en PDF y ChromeNiver Jose AwananchPas encore d'évaluation
- Plan de Unidad de Biologia 6°-2Document4 pagesPlan de Unidad de Biologia 6°-2Ingris Paola Ortega CastroPas encore d'évaluation
- Productos notables guía matemáticas grado 8Document4 pagesProductos notables guía matemáticas grado 8PoliMartinezPas encore d'évaluation
- CIENCIADocument3 pagesCIENCIARocio AntezanaPas encore d'évaluation
- Manejo de la calidad del agua en estanques de acuiculturaDocument62 pagesManejo de la calidad del agua en estanques de acuiculturaWilliam Montero67% (3)
- Guia Rp3 Mat2110Document77 pagesGuia Rp3 Mat2110rafael0% (1)
- Historia de La BellezaDocument17 pagesHistoria de La BellezaRobotin CalderonPas encore d'évaluation
- Joey El Niño MecanicoDocument3 pagesJoey El Niño MecanicoMarco Fdo100% (1)
- Cira y PmaDocument4 pagesCira y PmaMauro ContrerasPas encore d'évaluation
- Cómo Medir La Participación CulturalDocument134 pagesCómo Medir La Participación CulturalJesús ArmoPas encore d'évaluation
- Resolucion de Direccion Ejecutiva-000377-2022-De - AnexosDocument75 pagesResolucion de Direccion Ejecutiva-000377-2022-De - AnexosAndres RS ZKPas encore d'évaluation
- Administracion Por ObjetivosDocument30 pagesAdministracion Por ObjetivosMonica Perez MonagoPas encore d'évaluation
- Las Dos Luchas en Salud MentalDocument8 pagesLas Dos Luchas en Salud MentalRoberto TrottaPas encore d'évaluation
- NewropiaDocument12 pagesNewropiaCamilo Andres Espinosa RomeroPas encore d'évaluation
- Aec 12Document104 pagesAec 12leela4everPas encore d'évaluation
- Investigacion Cientifica MicroprocesadoresDocument12 pagesInvestigacion Cientifica Microprocesadoresdgm6478Pas encore d'évaluation
- Autoevaluación2017 BuenaDocument2 pagesAutoevaluación2017 Buenarodrifis1000100% (1)
- Minera Sulliden Shahuindo S A C Proyecto Sahuindo Resumen Ejecutivo EspanolDocument132 pagesMinera Sulliden Shahuindo S A C Proyecto Sahuindo Resumen Ejecutivo EspanolAbner MartinPas encore d'évaluation
- Sulcus Polipos Puberfonía GranulomaDocument2 pagesSulcus Polipos Puberfonía GranulomaCamila Jaque RamosPas encore d'évaluation
- Examen Parcial Dinamicabbbbbbbbbbbbbbbbbbb PDFDocument1 pageExamen Parcial Dinamicabbbbbbbbbbbbbbbbbbb PDFYiğit Şentürk2Pas encore d'évaluation
- El Aire en Las Tuberías (II) - Cálculo y Dimensionado de Ventosas - IAguaDocument10 pagesEl Aire en Las Tuberías (II) - Cálculo y Dimensionado de Ventosas - IAguaRyan AsPas encore d'évaluation
- Técnicas modernas para la producción de flores en Ccorao, CuscoDocument47 pagesTécnicas modernas para la producción de flores en Ccorao, CuscoVictor Flores YgnacioPas encore d'évaluation
- Las Masacres de Ayo Ayo y MohozaDocument5 pagesLas Masacres de Ayo Ayo y Mohozamilenka.titoPas encore d'évaluation
- Los Modelos Digitales de Terreno en CubiDocument63 pagesLos Modelos Digitales de Terreno en CubiMIGUEL ANGEL RUIZ GONZALEZPas encore d'évaluation
- Taller EU3 FinalDocument3 pagesTaller EU3 FinalLoanaPas encore d'évaluation
- Siprotec CursoDocument40 pagesSiprotec Cursoenzo vallejos60% (5)