Vous aimerez peut-être aussi
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisD'EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisÉvaluation : 4 sur 5 étoiles4/5 (2)
- Rotating Machinery Reliability for Technicians and EngineersD'EverandRotating Machinery Reliability for Technicians and EngineersPas encore d'évaluation
- VA II TrainingDocument393 pagesVA II Trainingjawadhussain195% (19)
- Cat IiDocument71 pagesCat Iimustafa100% (13)
- Mobius CAT III Activity Book 170112 A4Document35 pagesMobius CAT III Activity Book 170112 A4Novindra PutraPas encore d'évaluation
- CAT II Activity Book v4.0 - Letter - Answer KeyDocument7 pagesCAT II Activity Book v4.0 - Letter - Answer Keyazay_saja100% (2)
- CAT II Student Workbook v4.0 A4Document104 pagesCAT II Student Workbook v4.0 A4Mohamed Arafat100% (1)
- Cuaderno Curso - CAT I Activity Book Spanish With CoverDocument34 pagesCuaderno Curso - CAT I Activity Book Spanish With CoverJose Raul Reyes Dominguez100% (1)
- Balancing Letter PDFDocument307 pagesBalancing Letter PDFCamilo Andres Quintero100% (5)
- Vibration Analysis - Iso Cat II Asnt Level II 1331196230Document3 pagesVibration Analysis - Iso Cat II Asnt Level II 1331196230tylerdurdanePas encore d'évaluation
- Vibration Cat II Practise ExamDocument3 pagesVibration Cat II Practise Examalxmaas91% (11)
- ISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-ShurafaDocument1 pageISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-ShurafaMohammed Kamel Tony100% (1)
- PeakVue TrainingDocument98 pagesPeakVue TrainingThyagaraju Palisetty100% (5)
- Predict-Mobius Training BrochureDocument7 pagesPredict-Mobius Training BrochurefaisalPas encore d'évaluation
- Mobius Training Cat IIDocument10 pagesMobius Training Cat IISuhartomt33% (3)
- ISO 18436 Category III Vibration Analyst TrainingDocument4 pagesISO 18436 Category III Vibration Analyst TrainingDean LofallPas encore d'évaluation
- ISO 18436 Category IV Vibration Analyst TrainingDocument4 pagesISO 18436 Category IV Vibration Analyst TrainingDean Lofall50% (2)
- Autocorrelation: 131 CAT IV Part 1 - Signal Processing SlidebookDocument8 pagesAutocorrelation: 131 CAT IV Part 1 - Signal Processing SlidebookLe Thanh Hai100% (2)
- Introduction To PeakvueDocument55 pagesIntroduction To PeakvueAhmed Nazeem100% (4)
- Vibration Analysis Level 2 Manual PDFDocument2 pagesVibration Analysis Level 2 Manual PDFAsad KhanPas encore d'évaluation
- Phase MeasurementDocument5 pagesPhase Measurementuak107080Pas encore d'évaluation
- ISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-Shurafa PDFDocument1 pageISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-Shurafa PDFMohammed Kamel TonyPas encore d'évaluation
- Vibration Adv 0402Document433 pagesVibration Adv 0402Sajid Rafique100% (7)
- Vibration Analysis Certification Exam Certified Analyst Category I Principles of Vibration Test Sample Question PDFDocument1 pageVibration Analysis Certification Exam Certified Analyst Category I Principles of Vibration Test Sample Question PDFMohammed Kamel TonyPas encore d'évaluation
- ISO 18436 Category IVDocument2 pagesISO 18436 Category IVzona amrullohPas encore d'évaluation
- Advanced Vibration Analysis TechniquesDocument324 pagesAdvanced Vibration Analysis Techniquesharikrishnanpd3327Pas encore d'évaluation
- VIBS Modal Overview 021703 MACLDocument55 pagesVIBS Modal Overview 021703 MACLBakkiya RajPas encore d'évaluation
- Vibration Dignostic ChartDocument5 pagesVibration Dignostic ChartIbrahim Sammour92% (12)
- Introduction To Vibration Analysis Program - Bnetly NevadaDocument52 pagesIntroduction To Vibration Analysis Program - Bnetly NevadaSam100% (3)
- JPS Reliability Bearing FailuresDocument14 pagesJPS Reliability Bearing FailuresAnonymous Bdt0OGh100% (1)
- Cat II Cover A4 250912Document4 pagesCat II Cover A4 250912Shahbaz KhanPas encore d'évaluation
- Vibration Diagonistic ChartDocument1 pageVibration Diagonistic Chartjawadhussain1100% (10)
- Machinery Diagnostic PlotsDocument16 pagesMachinery Diagnostic Plotsfazzlie100% (1)
- Gearbox Vibration Analysis - Analysis Techniques: The Peril of Wall Chart' AnalystsDocument18 pagesGearbox Vibration Analysis - Analysis Techniques: The Peril of Wall Chart' AnalystsRICARDO OLIVEROPas encore d'évaluation
- Gearbox Vibration AnalysisDocument8 pagesGearbox Vibration AnalysisAndré Luiz Nogueira100% (5)
- PeakvueDocument68 pagesPeakvueChe Khairuddin100% (1)
- Vibration Diagonistic ChartDocument1 pageVibration Diagonistic ChartFN Engro100% (1)
- Vibration Analysis Iso Cat I Asnt Level I 1305326781 PDFDocument7 pagesVibration Analysis Iso Cat I Asnt Level I 1305326781 PDFVasile NicolauPas encore d'évaluation
- Vibration Training Mobius1Document26 pagesVibration Training Mobius1azhar.simebest88% (8)
- Training Course IIIDocument188 pagesTraining Course IIIHosam Abd Elkhalek100% (2)
- Machinery Malfunction Diagnosis and Correction Robert EisenmannDocument830 pagesMachinery Malfunction Diagnosis and Correction Robert Eisenmannvinothenergy100% (17)
- Vibration Field Guide (For the Newbie Vibration Analyst)D'EverandVibration Field Guide (For the Newbie Vibration Analyst)Pas encore d'évaluation
- Practical Machinery Vibration Analysis and Predictive MaintenanceD'EverandPractical Machinery Vibration Analysis and Predictive MaintenanceÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Mechanical Vibrations and Condition MonitoringD'EverandMechanical Vibrations and Condition MonitoringÉvaluation : 5 sur 5 étoiles5/5 (1)
- Machinery Lubrication Technician (MLT) I and II Certification Exam GuideD'EverandMachinery Lubrication Technician (MLT) I and II Certification Exam GuideÉvaluation : 2 sur 5 étoiles2/5 (1)
- Forsthoffer’s Component Condition MonitoringD'EverandForsthoffer’s Component Condition MonitoringÉvaluation : 4 sur 5 étoiles4/5 (2)
- Cat IiDocument72 pagesCat IiMuzammilPas encore d'évaluation
- VibrationTrainingActivityBooklet CatII MobiusDocument49 pagesVibrationTrainingActivityBooklet CatII MobiusNelver Daniel Sánchez BarbaPas encore d'évaluation
- Praktikum 2 Perawatan MS - Modul 4 - ISO & Bearing - Virtual PracticumDocument8 pagesPraktikum 2 Perawatan MS - Modul 4 - ISO & Bearing - Virtual Practicumyohanes alvinPas encore d'évaluation
- Examen Vibraciones Nivel IIDocument41 pagesExamen Vibraciones Nivel IIJim Morrison67% (3)
- (MODUL) - Praktikum Modul 4Document8 pages(MODUL) - Praktikum Modul 4Rafi AkbarPas encore d'évaluation
- Experiment 3 - High Frequency Amplifiers - MicrowaveDocument22 pagesExperiment 3 - High Frequency Amplifiers - Microwavethuantndtvt2883Pas encore d'évaluation
- Simple Harmonic Motion - ReportDocument6 pagesSimple Harmonic Motion - ReportMaimonh AlmamoryPas encore d'évaluation
- WWW Imv Co JP e PR Vibration - Measuring Chapter03Document5 pagesWWW Imv Co JP e PR Vibration - Measuring Chapter03Ruju RidhaniPas encore d'évaluation
- Vibrationsmessungen An Motor Und GeneratorDocument1 pageVibrationsmessungen An Motor Und GeneratorDjoko PurnomoPas encore d'évaluation
- VA-12 Datasheet 0907-7Document8 pagesVA-12 Datasheet 0907-7DANE80Pas encore d'évaluation
- Basic Vibration Seminar: ALPS Maintaineering Services, IncDocument101 pagesBasic Vibration Seminar: ALPS Maintaineering Services, Incbadgeo77Pas encore d'évaluation
- Vibration 1Document110 pagesVibration 1Dede Kaladri100% (1)
- VibrationDocument24 pagesVibrationDaniel Codina100% (1)
- Entradas Digitales Adam-5052Document1 pageEntradas Digitales Adam-5052zeroseyaPas encore d'évaluation
- HE-6800 Series Humidity Transmitters With Temperature SensorDocument2 pagesHE-6800 Series Humidity Transmitters With Temperature SensorzeroseyaPas encore d'évaluation
- MODBUS Protocol For Rectifier RS485 V1Document6 pagesMODBUS Protocol For Rectifier RS485 V1zeroseyaPas encore d'évaluation
- 977 TSI - Installation GuideDocument12 pages977 TSI - Installation Guidejust_hammaPas encore d'évaluation
- Entradas Analogicas Adam-5017uhDocument2 pagesEntradas Analogicas Adam-5017uhzeroseyaPas encore d'évaluation
- Salidas Digitales Adam-5069Document1 pageSalidas Digitales Adam-5069zeroseyaPas encore d'évaluation
- PLC Nueva Version Adam-5560kw20180910102251Document1 pagePLC Nueva Version Adam-5560kw20180910102251zeroseyaPas encore d'évaluation
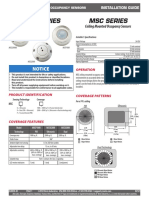
- MSC Series MSC Series: NoticeDocument3 pagesMSC Series MSC Series: Noticejose2525Pas encore d'évaluation
- PLC Adam 5550kwDocument2 pagesPLC Adam 5550kwzeroseyaPas encore d'évaluation
- Newmar DC-DC Converters Isolated IspDocument1 pageNewmar DC-DC Converters Isolated IspzeroseyaPas encore d'évaluation
- Manual Rosemount 4088 Multivariable Transmitter en 78314 Páginas 15,42,46 47,49,51,53,56,59,64,126,128Document12 pagesManual Rosemount 4088 Multivariable Transmitter en 78314 Páginas 15,42,46 47,49,51,53,56,59,64,126,128zeroseyaPas encore d'évaluation
- Programming Logical Instructions in A Function Block DiagramDocument6 pagesProgramming Logical Instructions in A Function Block DiagramzeroseyaPas encore d'évaluation
- Emmerson Wireless 1420Document20 pagesEmmerson Wireless 1420zeroseyaPas encore d'évaluation
- 1794-OW8 Installation Instructions FLEX IO 8 Relay Output Module-4Document1 page1794-OW8 Installation Instructions FLEX IO 8 Relay Output Module-4zeroseyaPas encore d'évaluation
- MVI56-MCM: User ManualDocument159 pagesMVI56-MCM: User ManualzeroseyaPas encore d'évaluation
- Newmar Power Modules GENERADORDocument2 pagesNewmar Power Modules GENERADORzeroseyaPas encore d'évaluation
- EE NEMA 4X Sales NoteDocument2 pagesEE NEMA 4X Sales NotezeroseyaPas encore d'évaluation
- VC4000Document95 pagesVC4000rajpd28Pas encore d'évaluation
- Figure 10. Types EZH and EZHSO DimensionsDocument2 pagesFigure 10. Types EZH and EZHSO DimensionszeroseyaPas encore d'évaluation
- 6ES72111AE400XB0 Datasheet en PDFDocument9 pages6ES72111AE400XB0 Datasheet en PDFSebastian Alexis Muñoz PoveaPas encore d'évaluation
- 1756 Controllogix Chassis Specifications: Technical DataDocument24 pages1756 Controllogix Chassis Specifications: Technical DataJhonatan QuispePas encore d'évaluation
- 1756 Controllogix Chassis Specifications: Technical DataDocument24 pages1756 Controllogix Chassis Specifications: Technical DataJhonatan QuispePas encore d'évaluation
- Bently Nevada Wind Renewables Adapt Brochure 2018Document8 pagesBently Nevada Wind Renewables Adapt Brochure 2018zeroseyaPas encore d'évaluation
- Detection of Wind Turbine Gear Tooth Defects Using Sideband Energy Ratio™Document6 pagesDetection of Wind Turbine Gear Tooth Defects Using Sideband Energy Ratio™zeroseyaPas encore d'évaluation
- Bently Nevada 3500 PresentationDocument46 pagesBently Nevada 3500 PresentationIndranil Hatua94% (17)
- Instructions For Use Diagnostic Suite UsDocument47 pagesInstructions For Use Diagnostic Suite UszeroseyaPas encore d'évaluation
- Instructions For Use Ac40 en Es PTDocument21 pagesInstructions For Use Ac40 en Es PTzeroseyaPas encore d'évaluation
- Instructions For Use Ac40 en Es PTDocument21 pagesInstructions For Use Ac40 en Es PTzeroseyaPas encore d'évaluation
- 3500 92 Communication Module 138629 01 Rev D PDFDocument106 pages3500 92 Communication Module 138629 01 Rev D PDFzeroseyaPas encore d'évaluation
- Tech Quiz #92: by Jim White, Shermco IndustriesDocument1 pageTech Quiz #92: by Jim White, Shermco IndustrieshansamvPas encore d'évaluation
- DSM Vibration Welding PDFDocument20 pagesDSM Vibration Welding PDFraj202987_47312067100% (1)
- Nurture Test Series / Joint Package Course: Distance Learning ProgrammeDocument8 pagesNurture Test Series / Joint Package Course: Distance Learning ProgrammeRebanta BeraPas encore d'évaluation
- CH16: Adsorption and Ion ExchangeDocument5 pagesCH16: Adsorption and Ion Exchangeangel matienzoPas encore d'évaluation
- Answers To Selected Exercises: Ix) Ix)Document34 pagesAnswers To Selected Exercises: Ix) Ix)s_adhyaPas encore d'évaluation
- Worksheet 3 CH: 1 Electric Flux & Gauss's LawDocument2 pagesWorksheet 3 CH: 1 Electric Flux & Gauss's LawJiya JithinPas encore d'évaluation
- General Physics - E&M (PHY 1308) General Physics - E&M (PHY 1308)Document4 pagesGeneral Physics - E&M (PHY 1308) General Physics - E&M (PHY 1308)Ahmed FawziPas encore d'évaluation
- LED Thermal Management Basics For PCB DesignersDocument63 pagesLED Thermal Management Basics For PCB DesignersSaturn Electronics CorporationPas encore d'évaluation
- CH 10Document13 pagesCH 10patilamardip0078122Pas encore d'évaluation
- Flux Screen For GeneratorsDocument13 pagesFlux Screen For GeneratorsMichal KowalczykPas encore d'évaluation
- Simply Supported TrussesDocument10 pagesSimply Supported TrussesKhalil Barakzai0% (1)
- Presentation On TransformerDocument15 pagesPresentation On TransformerManish RanaPas encore d'évaluation
- Electromagnetic I EELE 3331: Electrostatic FieldsDocument84 pagesElectromagnetic I EELE 3331: Electrostatic Fieldsmae100% (1)
- Problem 6: Answer: 138.24kN, 157.93kN, 304kNDocument1 pageProblem 6: Answer: 138.24kN, 157.93kN, 304kNMarvin Carl GranadaPas encore d'évaluation
- Week008-009 Rotational Motion and GravityDocument4 pagesWeek008-009 Rotational Motion and GravityDianna Katherine SalazarPas encore d'évaluation
- Lecture-2 Unit ConsistencyDocument37 pagesLecture-2 Unit ConsistencyHashir FurhanPas encore d'évaluation
- Physci2ndqtrmidtest Answers KeyDocument2 pagesPhysci2ndqtrmidtest Answers Keynhaner dolocabPas encore d'évaluation
- Exercise Set 4.1Document19 pagesExercise Set 4.1hassan.muradPas encore d'évaluation
- Chapter Test A: Teacher Notes and Answers Momentum and CollisionsDocument5 pagesChapter Test A: Teacher Notes and Answers Momentum and CollisionsHans HenryPas encore d'évaluation
- Ruiz.l - Quiz 2Document3 pagesRuiz.l - Quiz 2lucio ruiz jrPas encore d'évaluation
- Analog Sensors PDFDocument110 pagesAnalog Sensors PDFakozyPas encore d'évaluation
- A Study On Enhancement of Filtration Process With Filter Aids Diatomaceous Earth and Wood Pulp CelluloseDocument7 pagesA Study On Enhancement of Filtration Process With Filter Aids Diatomaceous Earth and Wood Pulp CellulosegoldennanukPas encore d'évaluation
- Base Isolation - Seismic and WindsDocument2 pagesBase Isolation - Seismic and WindskamakshiPas encore d'évaluation
- T494Document10 pagesT494Liliana Mejia HoyosPas encore d'évaluation
- An Introduction To CryogenicsDocument10 pagesAn Introduction To CryogenicsYasir Ali100% (1)
- A Review On Numerical and Experimental StudyDocument4 pagesA Review On Numerical and Experimental StudyAbhijit GhoshPas encore d'évaluation
- JOURNEYMAN CLOSED BOOK EXAM#02 (v2.0)Document52 pagesJOURNEYMAN CLOSED BOOK EXAM#02 (v2.0)E.G Boy GudaPas encore d'évaluation
- Drilling Problems N Drilling OptimizationDocument68 pagesDrilling Problems N Drilling Optimizationngecus67% (3)