Vous aimerez peut-être aussi
- W1133Document15 pagesW1133Aanchal TyagiPas encore d'évaluation
- W1121Document15 pagesW1121Tamil VananPas encore d'évaluation
- W1129Document16 pagesW1129Tamil VananPas encore d'évaluation
- 670 Helicopter Night PilotageDocument10 pages670 Helicopter Night PilotageTamil VananPas encore d'évaluation
- Aircraft Navigation 353Document7 pagesAircraft Navigation 353Tamil VananPas encore d'évaluation
- Aircraft Computers: 1999 John Wiley & Sons, IncDocument15 pagesAircraft Computers: 1999 John Wiley & Sons, IncTamil VananPas encore d'évaluation
- W1112Document27 pagesW1112Tamil VananPas encore d'évaluation
- Aerospace and Electronic Systems W1102Document11 pagesAerospace and Electronic Systems W1102pruebaprooftestPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Stepping Heavenward by Prentiss, E. (Elizabeth), 1818-1878Document181 pagesStepping Heavenward by Prentiss, E. (Elizabeth), 1818-1878Gutenberg.orgPas encore d'évaluation
- Xpac 2004 Release NotesDocument11 pagesXpac 2004 Release NotesAgustinus YosefPas encore d'évaluation
- Boarding Pass (Web Check In) WWW - Goindigo.In: Ms Jasda Ramchandani Jaipur (T2) 6E 783 08 Aug 20Document1 pageBoarding Pass (Web Check In) WWW - Goindigo.In: Ms Jasda Ramchandani Jaipur (T2) 6E 783 08 Aug 20Kscsiddhant KscsiddhantPas encore d'évaluation
- Case RCBDocument76 pagesCase RCBSaurabh KatariaPas encore d'évaluation
- Hci - Week 2 - Hci Overview PDFDocument28 pagesHci - Week 2 - Hci Overview PDFMayo NnanensPas encore d'évaluation
- Operation Guide 5522: Things To Check Before Using The Watch About This ManualDocument7 pagesOperation Guide 5522: Things To Check Before Using The Watch About This Manualfirdaus_stPas encore d'évaluation
- Combi Rebarbadora - 3 601 H20 8E0 - GWS 8-115Document4 pagesCombi Rebarbadora - 3 601 H20 8E0 - GWS 8-115antonyPas encore d'évaluation
- Decimal To Artnet Conversion TableDocument2 pagesDecimal To Artnet Conversion Tablejray1982Pas encore d'évaluation
- GitHub - Bluelavasystems - Xt-Ide - XT-IDE Rev 4.1Document1 pageGitHub - Bluelavasystems - Xt-Ide - XT-IDE Rev 4.1shida67Pas encore d'évaluation
- Price List Ymh B.indonesia 20-02-2020Document928 pagesPrice List Ymh B.indonesia 20-02-2020LighterPas encore d'évaluation
- Corporate Entrepreneurship - HowDocument30 pagesCorporate Entrepreneurship - HowHoang Anh TuanPas encore d'évaluation
- Robotic Process AutomationDocument6 pagesRobotic Process AutomationTanushree KalitaPas encore d'évaluation
- BU R&D Form 1 - Detailed R&D Program or Project ProposalDocument2 pagesBU R&D Form 1 - Detailed R&D Program or Project ProposalOween SamsonPas encore d'évaluation
- Zwave Compatibility ListDocument2 pagesZwave Compatibility ListsupermanPas encore d'évaluation
- Dav DZ340 PDFDocument92 pagesDav DZ340 PDFCurtoAVidaPas encore d'évaluation
- EngineeringDocument113 pagesEngineeringGlass-Half-EmptyPas encore d'évaluation
- "Water Bottle Tracker": (For Water Refilling Stations)Document3 pages"Water Bottle Tracker": (For Water Refilling Stations)Rated SpgPas encore d'évaluation
- Exp 2Document4 pagesExp 2tahiaPas encore d'évaluation
- Student GuideDocument342 pagesStudent GuideEduardo Velazquez MoraPas encore d'évaluation
- Configuring SNMP On ProteusDocument12 pagesConfiguring SNMP On ProteusAijaz MirzaPas encore d'évaluation
- Rajesh Vasa - PHD ThesisDocument252 pagesRajesh Vasa - PHD Thesisrajeshvasa100% (1)
- Color Palettes For Graphic DesignDocument19 pagesColor Palettes For Graphic DesignClarence Tuazon FloresPas encore d'évaluation
- HP Moonshot Provisiong Manager User GuideDocument44 pagesHP Moonshot Provisiong Manager User GuideBalasubramanian ReguramanPas encore d'évaluation
- Zero Defect Quality in The Automobile Industry: A SIX SIGMADocument3 pagesZero Defect Quality in The Automobile Industry: A SIX SIGMAshivi73Pas encore d'évaluation
- Literature Review of Thermoelectric RefrigeratorDocument8 pagesLiterature Review of Thermoelectric Refrigeratorc5pehrgz100% (1)
- Assignment Questions For ISMDocument17 pagesAssignment Questions For ISMTeetu TomarPas encore d'évaluation
- Bohlin Visco 88Document2 pagesBohlin Visco 88amancivilPas encore d'évaluation
- Annotated BibliographyDocument5 pagesAnnotated Bibliographyapi-284997804100% (1)
- EAS6800+ High Quality Composite Video Encoder/Synchronizer and Analog Audio DemultiplexerDocument90 pagesEAS6800+ High Quality Composite Video Encoder/Synchronizer and Analog Audio DemultiplexerTechne PhobosPas encore d'évaluation
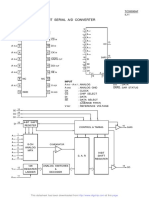
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DODocument1 pageC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangPas encore d'évaluation