Vous aimerez peut-être aussi
- Wind Sheer: It Is The Vertical Gradient in The Wind Velocity Developed Because of The FrictionDocument12 pagesWind Sheer: It Is The Vertical Gradient in The Wind Velocity Developed Because of The FrictionAnonymous 80p9OVPas encore d'évaluation
- Wind Sheer: It Is The Vertical Gradient in The Wind Velocity Developed Because of The FrictionDocument12 pagesWind Sheer: It Is The Vertical Gradient in The Wind Velocity Developed Because of The FrictionAnonymous 80p9OVPas encore d'évaluation
- CDDocument13 pagesCDAnonymous 80p9OVPas encore d'évaluation
- Analysis of A StructuralDocument1 pageAnalysis of A StructuralAnonymous 80p9OVPas encore d'évaluation
- Me509 FN sp2016 Sol PDFDocument8 pagesMe509 FN sp2016 Sol PDFAnonymous 80p9OVPas encore d'évaluation
- GDocument2 pagesGAnonymous 80p9OVPas encore d'évaluation
- AeroDyn PDFDocument60 pagesAeroDyn PDFAnonymous 80p9OVPas encore d'évaluation
- Program 14.6: MATLAB Program To Find The Frequency of A Timoshenko BeamDocument4 pagesProgram 14.6: MATLAB Program To Find The Frequency of A Timoshenko BeamAnonymous 80p9OVPas encore d'évaluation
- DocumentDocument2 pagesDocumentAnonymous 80p9OVPas encore d'évaluation
- 2Document5 pages2Anonymous 80p9OVPas encore d'évaluation
- Change LogDocument2 pagesChange LogAnonymous 80p9OVPas encore d'évaluation
- Ffap V 110 Dynstall PDFDocument56 pagesFfap V 110 Dynstall PDFAnonymous 80p9OVPas encore d'évaluation
- New 1Document106 pagesNew 1Anonymous 80p9OVPas encore d'évaluation
- Program 14.6: MATLAB Program To Find The Frequency of A Timoshenko BeamDocument4 pagesProgram 14.6: MATLAB Program To Find The Frequency of A Timoshenko BeamAnonymous 80p9OVPas encore d'évaluation
- With Large Scale Wind TurbinesDocument1 pageWith Large Scale Wind TurbinesAnonymous 80p9OVPas encore d'évaluation
- A Novel Dynamic Aeroelastic Framework For Aeroelastic Tailoring and Structural OptimisationDocument1 pageA Novel Dynamic Aeroelastic Framework For Aeroelastic Tailoring and Structural OptimisationAnonymous 80p9OVPas encore d'évaluation
- License en USDocument1 pageLicense en USGilang Budi AriawanPas encore d'évaluation
- With Large Scale Wind TurbinesDocument1 pageWith Large Scale Wind TurbinesAnonymous 80p9OVPas encore d'évaluation
- DocumentDocument2 pagesDocumentAnonymous 80p9OVPas encore d'évaluation
- Analysis of A StructuralDocument1 pageAnalysis of A StructuralAnonymous 80p9OVPas encore d'évaluation
- AbstractDocument1 pageAbstractAnonymous 80p9OVPas encore d'évaluation
- Forced VibrationsDocument2 pagesForced VibrationsAnonymous 80p9OVPas encore d'évaluation
- AbstractDocument1 pageAbstractAnonymous 80p9OVPas encore d'évaluation
- DocumentDocument2 pagesDocumentAnonymous 80p9OVPas encore d'évaluation
- Plot FASToutputDocument1 pagePlot FASToutputAnonymous 80p9OVPas encore d'évaluation
- Run DTU 10MW RWT turbine files with FASTDocument1 pageRun DTU 10MW RWT turbine files with FASTAnonymous 80p9OVPas encore d'évaluation
- Coupling of An Unsteady Lifting Line Free Vortex Wake Code To TheDocument17 pagesCoupling of An Unsteady Lifting Line Free Vortex Wake Code To TheAnonymous 80p9OVPas encore d'évaluation
- ParametersDocument1 pageParametersAnonymous 80p9OVPas encore d'évaluation
- 2Document5 pages2Anonymous 80p9OVPas encore d'évaluation
- Plot FASToutputDocument1 pagePlot FASToutputAnonymous 80p9OVPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Mmel Single Engine PDFDocument92 pagesMmel Single Engine PDFJP BrazalezPas encore d'évaluation
- ATR72 Maintenance Manuals Samples, AMM, TSM, Job Card (419 Pages)Document419 pagesATR72 Maintenance Manuals Samples, AMM, TSM, Job Card (419 Pages)Tony GarrisonPas encore d'évaluation
- Beechcraft Baron POHDocument367 pagesBeechcraft Baron POHluisduboishamon100% (3)
- 4 Planes PDFDocument51 pages4 Planes PDFYimmeeePas encore d'évaluation
- Engineering TechnologyDocument66 pagesEngineering TechnologyMhmoud Al-TamimiPas encore d'évaluation
- Aerial Ballistics - Shooting From A HelicopterDocument10 pagesAerial Ballistics - Shooting From A Helicopterrick.mccort2766Pas encore d'évaluation
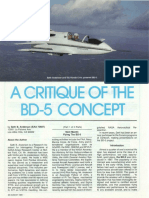
- A Critique of BD5 ConceptDocument9 pagesA Critique of BD5 ConceptTomasz LitwinekPas encore d'évaluation
- Technical Specifications & Standard Equipment ListDocument15 pagesTechnical Specifications & Standard Equipment ListDoti Tri PrasetioPas encore d'évaluation
- Fluid MechanicsDocument29 pagesFluid Mechanicsaminur3rahman-1Pas encore d'évaluation
- JEPP's Briefing - The Chart Clinic - 6th - Controlled AirspaceDocument2 pagesJEPP's Briefing - The Chart Clinic - 6th - Controlled AirspaceMarcos Braga100% (1)
- International AirportsDocument40 pagesInternational AirportsAlec AustriaPas encore d'évaluation
- United Republic of Tanzania Tanzania Civil Aviation Authority Application For Renewal of An Instrument RatingDocument4 pagesUnited Republic of Tanzania Tanzania Civil Aviation Authority Application For Renewal of An Instrument Ratingcapt.sahaagPas encore d'évaluation
- Student Name: Karthik Bala Manokaran Student ID: 3138610 Department: CIS-Data Science-21SPDocument9 pagesStudent Name: Karthik Bala Manokaran Student ID: 3138610 Department: CIS-Data Science-21SPkarthik BALAPas encore d'évaluation
- Bandas CartekDocument26 pagesBandas CartekGiorgio FerPas encore d'évaluation
- Dave's Airplanes Dave's Airplanes: Drive DetailsDocument2 pagesDave's Airplanes Dave's Airplanes: Drive Detailsandyroads2Pas encore d'évaluation
- Great DesignomicsDocument95 pagesGreat DesignomicsChristopher Allen VarsoviaPas encore d'évaluation
- Instrument RatingDocument110 pagesInstrument RatingAndy Pats100% (1)
- RV10 Poh RevADocument28 pagesRV10 Poh RevAGabriel BispoPas encore d'évaluation
- Flight Mechanics: Flight PerformanceDocument97 pagesFlight Mechanics: Flight PerformanceMohd Azri100% (1)
- Asw July12Document68 pagesAsw July12doru_varlanPas encore d'évaluation
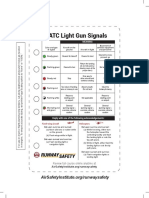
- ATC Light Gun Signals ExplainedDocument1 pageATC Light Gun Signals ExplainedEnrique GyosPas encore d'évaluation
- Section 2 Normal ProceduresDocument38 pagesSection 2 Normal ProceduresFidel ArellanoPas encore d'évaluation
- Mmel A320Document105 pagesMmel A320Levan KhupeniaPas encore d'évaluation
- Approach ManualDocument15 pagesApproach ManualMircea PopPas encore d'évaluation
- MegafortressDocument182 pagesMegafortressremow100% (1)
- (2016) BEM in Wind TurbineDocument7 pages(2016) BEM in Wind Turbinearda rizkiPas encore d'évaluation
- A16sw Mitsubishi Mu300 TcdsDocument14 pagesA16sw Mitsubishi Mu300 TcdssupermoixPas encore d'évaluation
- Flight Control LawsDocument9 pagesFlight Control LawsSreeja SunderPas encore d'évaluation
- Wind Tunnel Pope PDFDocument20 pagesWind Tunnel Pope PDFKrmxl Tdre100% (1)
- Faa H 8083 25a PDFDocument471 pagesFaa H 8083 25a PDFJose Miguel Peña PalafoxPas encore d'évaluation