Vous aimerez peut-être aussi
- Control PID discreto SIMULINKDocument12 pagesControl PID discreto SIMULINKAMAURY BRANDON VLADIMIR GUEVARA ROJASPas encore d'évaluation
- L6 Implementación PID Control DigitalDocument10 pagesL6 Implementación PID Control DigitalDIONEL ROPERO TORRESPas encore d'évaluation
- Examen de Contr. IndustDocument15 pagesExamen de Contr. IndustCesar VicenteloPas encore d'évaluation
- Practica 6 (Teorial Del Control 1)Document9 pagesPractica 6 (Teorial Del Control 1)Jose Antonio Tapia AlmazanPas encore d'évaluation
- Informe Final 4 Control Digital1Document10 pagesInforme Final 4 Control Digital1Nico PerezPas encore d'évaluation
- Lsca P11 2019BDocument3 pagesLsca P11 2019BDennys VillavicencioPas encore d'évaluation
- Función de Transferencia Pulso PDFDocument10 pagesFunción de Transferencia Pulso PDFalberto rojasPas encore d'évaluation
- Control PID microcontrolador calefacciónDocument6 pagesControl PID microcontrolador calefacciónpicotoPas encore d'évaluation
- Laboratorio 16 Control PIDDocument7 pagesLaboratorio 16 Control PIDJuan Luis Arisaca HuancaPas encore d'évaluation
- Proyecto de Motor CDDocument14 pagesProyecto de Motor CDAlexFernandoAlexParedesPas encore d'évaluation
- Control de Servomotor Usando dsPIC Con Controlador PIDDocument15 pagesControl de Servomotor Usando dsPIC Con Controlador PIDRicardo NietoPas encore d'évaluation
- Cap III Ptos 3-5 Función de Transferencia Pulso de Un Controlador DigitalDocument29 pagesCap III Ptos 3-5 Función de Transferencia Pulso de Un Controlador DigitalAlberto Pacheco HerreraPas encore d'évaluation
- Informe Pid Planta Posicion 2Document6 pagesInforme Pid Planta Posicion 2Francisco Joven-MunarPas encore d'évaluation
- Diseño e Implementación de Un Control PID Analógico y Digital.Document6 pagesDiseño e Implementación de Un Control PID Analógico y Digital.Daniel Camilo Palomino YasnoPas encore d'évaluation
- Examen Controladores IndustrialDocument5 pagesExamen Controladores Industrialerwin13% (8)
- Paracial 2 - Control Industrial - Tipo Examen + Examen QuímicaDocument4 pagesParacial 2 - Control Industrial - Tipo Examen + Examen QuímicaJoaquin SaguierPas encore d'évaluation
- Proyecto PidDocument5 pagesProyecto PidAriel Sanchez ArreozolaPas encore d'évaluation
- Informe Lab 3Document8 pagesInforme Lab 3jsofiabeltranPas encore d'évaluation
- Diseño ControladoresDocument18 pagesDiseño ControladoresArmando Arevalo RamirezPas encore d'évaluation
- RFIDDocument4 pagesRFIDAndrés Estepa RojasPas encore d'évaluation
- Método de Ziegler y NicholsDocument11 pagesMétodo de Ziegler y Nicholserick190796Pas encore d'évaluation
- Trabajo 1 U2 CDDocument2 pagesTrabajo 1 U2 CDCesar QuilumbaquinPas encore d'évaluation
- Binp U3 Ea MagpDocument10 pagesBinp U3 Ea MagpAngeles GrajalesPas encore d'évaluation
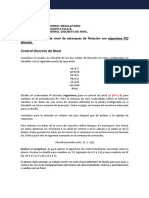
- Proyecto 02 Control RegulatorioDocument2 pagesProyecto 02 Control RegulatorioAuberPas encore d'évaluation
- Proyecto PROTEUS LabVIEW MATLAB Programacion y Simulacion PDFDocument15 pagesProyecto PROTEUS LabVIEW MATLAB Programacion y Simulacion PDFchimolo VanegasPas encore d'évaluation
- Fase 3 - Grupo - 16Document18 pagesFase 3 - Grupo - 16albertoPas encore d'évaluation
- Control PID motor DCDocument14 pagesControl PID motor DCAlvaro Quisilema MedranoPas encore d'évaluation
- Proyecto GODAR MT-4A - SEM15 - RICARDO - TORRES - GONZÁLEZ - A - MTAUT - PROYECTO - FINALDocument24 pagesProyecto GODAR MT-4A - SEM15 - RICARDO - TORRES - GONZÁLEZ - A - MTAUT - PROYECTO - FINALGameflow StudiosPas encore d'évaluation
- Control PID posición ascensorDocument4 pagesControl PID posición ascensorCarlos CaceresPas encore d'évaluation
- Lab 7 Efecto Acciones de Control PIDDocument9 pagesLab 7 Efecto Acciones de Control PIDJohan Adrian Arcos SantacruzPas encore d'évaluation
- Examen - Controladores IndustrialesDocument11 pagesExamen - Controladores IndustrialesAlan Nuñez100% (1)
- Control PID PrácticoDocument9 pagesControl PID PrácticoOctavio Alamillo MoctezumaPas encore d'évaluation
- LabControl P07 Sintonía 2 S20232Document5 pagesLabControl P07 Sintonía 2 S20232Leidy Tatiana Quiroga AlzatePas encore d'évaluation
- Diseño de Un Controlador PID para Una Planta de Luz Mediante MatlabDocument7 pagesDiseño de Un Controlador PID para Una Planta de Luz Mediante Matlabjorge_22191160% (1)
- Digitalización de Un Controlador PIDDocument6 pagesDigitalización de Un Controlador PIDSonia MaturanaPas encore d'évaluation
- Control Velocidad PI de Un Motor DCDocument9 pagesControl Velocidad PI de Un Motor DCArmando Vázquez RamírezPas encore d'évaluation
- Practica 04 Siaruqui BustamanteDocument10 pagesPractica 04 Siaruqui BustamanteUES ALANPas encore d'évaluation
- Control PID y Creacion de LibreriasDocument31 pagesControl PID y Creacion de Libreriasjuan carlosPas encore d'évaluation
- Paper Proy ControlDocument6 pagesPaper Proy ControlStefanyPas encore d'évaluation
- Prepa6 - Instrumentacion IndustrialDocument9 pagesPrepa6 - Instrumentacion IndustrialVíctor Renato Díaz CajasPas encore d'évaluation
- Control PID LAB4Document10 pagesControl PID LAB4william abel taboada gambiniPas encore d'évaluation
- Examen Final CAPDocument22 pagesExamen Final CAPRAUL . ARAYA GUTIERREZPas encore d'évaluation
- Modelado de Un Sistema de Control de Velocidad de Un Motor DCDocument6 pagesModelado de Un Sistema de Control de Velocidad de Un Motor DCCarlos Jose MárquezPas encore d'évaluation
- 6.control de Posicion Por Espacio de EstadosDocument10 pages6.control de Posicion Por Espacio de EstadosArmando Vázquez RamírezPas encore d'évaluation
- INFORME Proyecto FinalDocument12 pagesINFORME Proyecto FinalJoana ESPas encore d'évaluation
- Control térmico MatlabDocument9 pagesControl térmico MatlabDiego Fernando ÑauñayPas encore d'évaluation
- Formato Presentacion Documentos Normas IeeeDocument5 pagesFormato Presentacion Documentos Normas IeeeDanii PalaciosPas encore d'évaluation
- Controlador PID PI RVFDocument12 pagesControlador PID PI RVFRichard VarasPas encore d'évaluation
- Guia Lab 6 y 7 - 2021.2Document12 pagesGuia Lab 6 y 7 - 2021.2Jim Fabián GonzalesPas encore d'évaluation
- Control Fuzzy PID de Una Planta de TemperaturaDocument2 pagesControl Fuzzy PID de Una Planta de TemperaturawilithPas encore d'évaluation
- Lab 11 Sintonia Al Tanteo FinalDocument11 pagesLab 11 Sintonia Al Tanteo FinalCarol Sugey S. PérezPas encore d'évaluation
- CDDDocument7 pagesCDDJff RocafuertePas encore d'évaluation
- Parte B SCDDocument24 pagesParte B SCDFranck JonhsonPas encore d'évaluation
- Guía 6Document4 pagesGuía 6JosuePas encore d'évaluation
- Lab 6Document6 pagesLab 6Oliver Gálvez ZavaletaPas encore d'évaluation
- EL218 Unidad 4b Sintonía de Controladores PID 2023-2Document55 pagesEL218 Unidad 4b Sintonía de Controladores PID 2023-2Susan Nicold TapiaPas encore d'évaluation
- Labo de Control 2 PIDDocument16 pagesLabo de Control 2 PIDMichael Infantes HuacancaPas encore d'évaluation
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaD'EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaPas encore d'évaluation
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaD'EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaPas encore d'évaluation
- Prácticas de redes de datos e industrialesD'EverandPrácticas de redes de datos e industrialesÉvaluation : 4 sur 5 étoiles4/5 (5)
- Distribución y problemas del laboratorio lácteoDocument2 pagesDistribución y problemas del laboratorio lácteoJuan PabloPas encore d'évaluation
- Manual EdgeCamDocument73 pagesManual EdgeCamJuan Pablo50% (2)
- Reporte Brazo Con Griper 6 GDLDocument2 pagesReporte Brazo Con Griper 6 GDLJuan PabloPas encore d'évaluation
- Practica 01 SW PDFDocument6 pagesPractica 01 SW PDFNicolás Cristóbal Uzárraga RodríguezPas encore d'évaluation
- Tema El Control Social de La TecnologíaDocument9 pagesTema El Control Social de La TecnologíaJuan PabloPas encore d'évaluation
- Glosario de MetrologiaDocument109 pagesGlosario de MetrologiaJulian EsquivelPas encore d'évaluation
- Cómo Actúa Un AntitranspiranteDocument9 pagesCómo Actúa Un AntitranspiranteKalena MonteroPas encore d'évaluation
- Trabajo Finaltr1Document8 pagesTrabajo Finaltr1Carlitos Vasquez vasquezPas encore d'évaluation
- Avance1 - Anteproyecto - Grupo2 (1) CorregidoDocument21 pagesAvance1 - Anteproyecto - Grupo2 (1) CorregidoHilda MirandaPas encore d'évaluation
- 2 Gestión - de - Proyectos - Cos - (Administración - de - Proyectos - )Document1 page2 Gestión - de - Proyectos - Cos - (Administración - de - Proyectos - )Carlos Herrera MezaPas encore d'évaluation
- DO-VZO-400-003 Rev.03Document5 pagesDO-VZO-400-003 Rev.03Erick AlvarezPas encore d'évaluation
- MOnografia de ArracachaDocument4 pagesMOnografia de ArracachaAlvaro Mexicano VargasPas encore d'évaluation
- Sopa de Letras Big Challenge T2Document1 pageSopa de Letras Big Challenge T2rlsh21072010Pas encore d'évaluation
- Informe TecnicoDocument2 pagesInforme TecnicoDaniel E Contreras UPas encore d'évaluation
- Clase 15 Auxiliar ContableDocument8 pagesClase 15 Auxiliar ContableAida GonzalezPas encore d'évaluation
- Acto Jurídico - Wikipedia, La Enciclopedia LibreDocument7 pagesActo Jurídico - Wikipedia, La Enciclopedia LibreJuan Sebastian DueñasPas encore d'évaluation
- LINAct 2Document9 pagesLINAct 2Uriel BaltazarPas encore d'évaluation
- Historieta POT PDFDocument36 pagesHistorieta POT PDFmario leivaPas encore d'évaluation
- Comprobacion de Encendido HellaDocument28 pagesComprobacion de Encendido HellaPablo RiscoPas encore d'évaluation
- Reglamento General UFI 2018 PDFDocument47 pagesReglamento General UFI 2018 PDFFélix Llamosas84% (19)
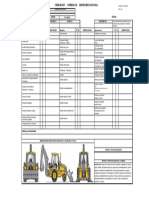
- Checklist Retroexcavadora GizaDocument1 pageChecklist Retroexcavadora GizaBryan Quintero Calderón100% (1)
- Cartas de Compromiso (Miembros de Seccional) 2022-1Document2 pagesCartas de Compromiso (Miembros de Seccional) 2022-1jose menizPas encore d'évaluation
- Enlucidos de Cielo RasoDocument11 pagesEnlucidos de Cielo RasoLuzz Mara QCPas encore d'évaluation
- Capacidades de Llenado 730Document1 pageCapacidades de Llenado 730Miguel GuerreroPas encore d'évaluation
- Konrad ZuseDocument21 pagesKonrad ZuseMaite SofiaPas encore d'évaluation
- EmpresaDocument11 pagesEmpresaBlanca100% (1)
- Sistemas Operativos de RedDocument2 pagesSistemas Operativos de RedSaida CampañaPas encore d'évaluation
- Procesos de Alfabetización Digital Comunitaria en La Escuela PrimariaDocument12 pagesProcesos de Alfabetización Digital Comunitaria en La Escuela PrimariaAnfap_2012Pas encore d'évaluation
- ShowDocument2 pagesShowElizabeth cortes viafaraPas encore d'évaluation
- Planilla de Sistema de Costo 1Document1 pagePlanilla de Sistema de Costo 1eduardoPas encore d'évaluation
- Aclaratoria de LinderosDocument2 pagesAclaratoria de LinderosYolimar ricoPas encore d'évaluation
- 2A-Metales Pesados en Aguas SuperficialesDocument22 pages2A-Metales Pesados en Aguas SuperficialesYANETH YANINA CARPIO MENDEZPas encore d'évaluation
- 5 Zonas Arqueológicas de GuatemalaDocument3 pages5 Zonas Arqueológicas de GuatemalaDannys CuxPas encore d'évaluation
- Caso 6 Modulo 4 Costos IDocument15 pagesCaso 6 Modulo 4 Costos IJacqueline SandiPas encore d'évaluation
- Lazo Marcas Planeamiento Piña PDFDocument205 pagesLazo Marcas Planeamiento Piña PDFMaxPas encore d'évaluation
- Propiedad Planta y EquipoDocument25 pagesPropiedad Planta y EquipoAaron Orozco100% (1)