Vous aimerez peut-être aussi
- AMOD 201510 Mecánico Automotriz Adecuado PDFDocument27 pagesAMOD 201510 Mecánico Automotriz Adecuado PDFEdwin Idrogo vasquezPas encore d'évaluation
- PRACTICA 4-El Regloscopio o Centrador de FarosDocument6 pagesPRACTICA 4-El Regloscopio o Centrador de FarosMiiguelMoliinaPas encore d'évaluation
- Mantenibilidad PresentacionDocument16 pagesMantenibilidad PresentacionaltiradoPas encore d'évaluation
- Tecnicas para Resolver Problemas TermodinamicosDocument8 pagesTecnicas para Resolver Problemas TermodinamicosMicaela Gómez BeauvoirPas encore d'évaluation
- Módulo DidácticoDocument8 pagesMódulo Didácticoanthoni romero chucoPas encore d'évaluation
- Funciones Que Realiza Un Escáner AutomotrizDocument1 pageFunciones Que Realiza Un Escáner AutomotrizAilotsue Odacrem Adnarim0% (1)
- Foro TematicoDocument9 pagesForo Tematicoluisgustavo segurachavezPas encore d'évaluation
- Informe Sensores 1Document13 pagesInforme Sensores 1nandofelixPas encore d'évaluation
- Mantenimiento de Motores de Combustion InternaDocument12 pagesMantenimiento de Motores de Combustion InternaRichard ZeaPas encore d'évaluation
- Tecnología Del Diagnóstico de Los Sistemas Electrónicos de Los VehículosDocument106 pagesTecnología Del Diagnóstico de Los Sistemas Electrónicos de Los VehículosGerardo100% (2)
- Diagrama y Materiales para Instalar NeblinerosDocument2 pagesDiagrama y Materiales para Instalar NeblinerosLuis Opazo CanibiloPas encore d'évaluation
- Ensayos No Destructivos para Fabricantes de Maquinaria PesadaDocument2 pagesEnsayos No Destructivos para Fabricantes de Maquinaria PesadagianiPas encore d'évaluation
- Sistemas de Inyeccion Monopunto (Mono-Jetronic)Document44 pagesSistemas de Inyeccion Monopunto (Mono-Jetronic)Jenner Choquehuanca ChamorroPas encore d'évaluation
- Entregable de ElectronicaDocument8 pagesEntregable de ElectronicaRonald Carrion QuispePas encore d'évaluation
- OBD y OBD2Document29 pagesOBD y OBD2Danilo MuñozPas encore d'évaluation
- ATS - Ejemplo - Automotriz2023Document2 pagesATS - Ejemplo - Automotriz2023Eduard JosuePas encore d'évaluation
- Silabo de Sistemas de Inyección A GasolinaDocument5 pagesSilabo de Sistemas de Inyección A GasolinaJonathan CrisPas encore d'évaluation
- Alarma Automotriz Trabajo en Clase 2020Document2 pagesAlarma Automotriz Trabajo en Clase 2020Anonymous 28jRu2jPas encore d'évaluation
- Metrologia Del MotorDocument10 pagesMetrologia Del MotorAndres Arias100% (1)
- Amtd Amtd-310 TrabajofinalDocument3 pagesAmtd Amtd-310 TrabajofinalCeviche 17Pas encore d'évaluation
- Memoria EPROMDocument5 pagesMemoria EPROMJulio César Arévalo100% (1)
- Amod Amod-607-Tarea T001Document2 pagesAmod Amod-607-Tarea T001David Quispe CahuinaPas encore d'évaluation
- Temario Del Curso AutotrónicaDocument5 pagesTemario Del Curso AutotrónicaManuel Gonzalo ChachapoyasPas encore d'évaluation
- Proyecto Final MotorDocument35 pagesProyecto Final MotorAbraham LeonPas encore d'évaluation
- Taller No. 1 Motor de Combustión InternaDocument2 pagesTaller No. 1 Motor de Combustión Internakevin araujoPas encore d'évaluation
- Proyecto 1Document41 pagesProyecto 1Jhonny Sp100% (1)
- Amod Accu-212 FormatoalumnotrabajofinalDocument7 pagesAmod Accu-212 FormatoalumnotrabajofinalYeni Graciela Cantoral LopezPas encore d'évaluation
- 5 HOJA DE OPERACIÓN Balanceo de Neumáticos PDFDocument2 pages5 HOJA DE OPERACIÓN Balanceo de Neumáticos PDFkevinPas encore d'évaluation
- Diagnostico Del Modulo de Control ElectronicoDocument6 pagesDiagnostico Del Modulo de Control ElectronicoRoberth Jaime Barbaran Ramos67% (3)
- Gestion Electronica de MotorDocument44 pagesGestion Electronica de MotorEver Villanueva VilcaPas encore d'évaluation
- Modulo 4Document52 pagesModulo 4celedonio100% (1)
- Péstillos ElectricosDocument11 pagesPéstillos ElectricosGiancarloGutierrezRzPas encore d'évaluation
- Modulo 3Document36 pagesModulo 3celedonioPas encore d'évaluation
- Frenos TesisDocument153 pagesFrenos TesistitoPas encore d'évaluation
- Autotronica SensoresDocument5 pagesAutotronica SensoresCastro Barrera JonnathanPas encore d'évaluation
- Las Averias en Un Vehiculo Automotor y El Analisis de FallasDocument5 pagesLas Averias en Un Vehiculo Automotor y El Analisis de FallasRoberto MaggioloPas encore d'évaluation
- Actuadores y SensoresDocument19 pagesActuadores y SensoresAlejandro MoraPas encore d'évaluation
- Proyecto AceroDocument83 pagesProyecto AceroRolando Q-ClPas encore d'évaluation
- Amtd Amtd-508 PresentaciónDocument86 pagesAmtd Amtd-508 Presentaciónelio100% (1)
- Sensores de Posicion OpticosDocument5 pagesSensores de Posicion OpticosJorge Alonso GarciaPas encore d'évaluation
- Proy de Innovacion Iyeccion IndirectaDocument80 pagesProy de Innovacion Iyeccion IndirectaSanchez Valencia Israel60% (5)
- El Protocolo FLEXRAYDocument20 pagesEl Protocolo FLEXRAYPirri BlancoPas encore d'évaluation
- Inductores o BobinasDocument24 pagesInductores o Bobinaskmiloo2575% (4)
- Prueba y Diagnostico de FallasDocument5 pagesPrueba y Diagnostico de FallasJosé Elías Reina PérezPas encore d'évaluation
- Analisis de Falla en Equipo PesadoDocument2 pagesAnalisis de Falla en Equipo PesadoNick Kevin CallalliPas encore d'évaluation
- Formato de Practica de La BateriaDocument6 pagesFormato de Practica de La BateriasaulPas encore d'évaluation
- Guía de Práctica 1Document5 pagesGuía de Práctica 1Geovanny TandazoPas encore d'évaluation
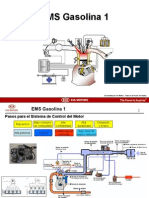
- EMS Gasoline 1Document39 pagesEMS Gasoline 1hiram54100% (1)
- Hoja de Práctica de Taller 01 GasDocument4 pagesHoja de Práctica de Taller 01 GasArkai KurenaiPas encore d'évaluation
- Práctica de EmbragueDocument5 pagesPráctica de EmbragueWashington QuishpiPas encore d'évaluation
- Proyecto Mecanica SenatiDocument66 pagesProyecto Mecanica SenatiBrandwin LmPas encore d'évaluation
- Tipos de EmbraguesDocument5 pagesTipos de EmbraguesJhon Silver FreirePas encore d'évaluation
- Sistema Electronico 11-02-22Document4 pagesSistema Electronico 11-02-22elvis chancayauriPas encore d'évaluation
- 3 Inspección, Localización y Soluciones de Problemas Del Sistema de Arranque.Document4 pages3 Inspección, Localización y Soluciones de Problemas Del Sistema de Arranque.LourdesPas encore d'évaluation
- Alumbrado BasicoDocument7 pagesAlumbrado BasicoXavier La Barra Del Rey MolineroPas encore d'évaluation
- El MicrometroDocument11 pagesEl MicrometroOSCAR FABIAN GONZALEZ CASTROPas encore d'évaluation
- Tesis Final 1.1Document205 pagesTesis Final 1.1AiraSanMartínVallejos0% (1)
- Gpai2017b P05 SensoresDocument53 pagesGpai2017b P05 SensoresOscar Chambi QuispePas encore d'évaluation
- Características de Un SensorDocument4 pagesCaracterísticas de Un SensorcimarronPas encore d'évaluation
- Definición de SensorDocument6 pagesDefinición de SensorAbi GutiérrezPas encore d'évaluation
- Anexo D - Alcance Del Servicio PDFDocument232 pagesAnexo D - Alcance Del Servicio PDFJose AnthonyPas encore d'évaluation
- Lista de SuministrosDocument14 pagesLista de SuministrosJose AnthonyPas encore d'évaluation
- LCCA TerminadoDocument27 pagesLCCA TerminadoJose AnthonyPas encore d'évaluation
- 1Document4 pages1Jose AnthonyPas encore d'évaluation
- CARATULASDocument2 pagesCARATULASJose AnthonyPas encore d'évaluation
- Sensores y ActuadoresDocument8 pagesSensores y ActuadoresJose AnthonyPas encore d'évaluation
- Máquina-Herramienta ClasificacionDocument17 pagesMáquina-Herramienta Clasificacionovrojas100% (1)
- Inspeccion VisualDocument10 pagesInspeccion VisualJose AnthonyPas encore d'évaluation
- AerobombasDocument4 pagesAerobombasJose AnthonyPas encore d'évaluation
- Partículas Magnéticas TRABAJO FINALLLLLLLLLLLDocument9 pagesPartículas Magnéticas TRABAJO FINALLLLLLLLLLLJose AnthonyPas encore d'évaluation
- Partículas Magnéticas TRABAJO FINALLLLLLLLLLLDocument9 pagesPartículas Magnéticas TRABAJO FINALLLLLLLLLLLJose AnthonyPas encore d'évaluation
- VEREDASDocument8 pagesVEREDASkharlhitha_17Pas encore d'évaluation
- Practica N 5Document5 pagesPractica N 5Jesus Lopez GoytiaPas encore d'évaluation
- La NutricionDocument17 pagesLa NutricionDaniela RuizPas encore d'évaluation
- Rubrica TA4Document87 pagesRubrica TA4Deslin Mera HernandezPas encore d'évaluation
- Generacion y Transporte de Sedimentos en La Cuenca Del Rio Bermejo PDFDocument228 pagesGeneracion y Transporte de Sedimentos en La Cuenca Del Rio Bermejo PDFNoe RiveraPas encore d'évaluation
- EXAMEN FINAL AG 2021 J. Vasquez.Document5 pagesEXAMEN FINAL AG 2021 J. Vasquez.Juan Eduardo Vasquez CarrisoPas encore d'évaluation
- Plantas AcuaticasDocument19 pagesPlantas AcuaticasAngela María Garcés H86% (7)
- Organizacion Desde El Punto de Vista EmpresarialDocument10 pagesOrganizacion Desde El Punto de Vista EmpresarialLuisPas encore d'évaluation
- Recuperacion Primaria, Secundaria y Terciara PDFDocument5 pagesRecuperacion Primaria, Secundaria y Terciara PDFNery Avalos LaraPas encore d'évaluation
- 1 Guía de Práctica e InvestigaciónDocument41 pages1 Guía de Práctica e InvestigaciónBibiano Alcarraz Carbajal80% (15)
- Seminario KinesiologiaDocument10 pagesSeminario KinesiologiaCarmen Infante100% (1)
- Guia #7 Analisis Vectorial IIIDocument5 pagesGuia #7 Analisis Vectorial IIICharly PhPas encore d'évaluation
- Com Uri Vasai Z Morales 17Document12 pagesCom Uri Vasai Z Morales 17Eduardo Asinc BenitesPas encore d'évaluation
- Caso Rosewood Hotels Lurie NicolasDocument5 pagesCaso Rosewood Hotels Lurie NicolasMaria Segura IbañezPas encore d'évaluation
- Actividad 2 - Mapeo y Diagrama de ProcesosDocument52 pagesActividad 2 - Mapeo y Diagrama de ProcesosfernandoPas encore d'évaluation
- Ses-Mart-Tut-La Importancia de La Autonomía para La Toma DecisionesDocument5 pagesSes-Mart-Tut-La Importancia de La Autonomía para La Toma DecisionesOscar ZapataPas encore d'évaluation
- Asamblea Extraordinaria Cambio de Dirección, Objeto y Aumento de Capital EL AMATILLODocument6 pagesAsamblea Extraordinaria Cambio de Dirección, Objeto y Aumento de Capital EL AMATILLOheidy urrutiaPas encore d'évaluation
- Plan de Contingencia Por Navidad 2018-2019Document18 pagesPlan de Contingencia Por Navidad 2018-2019Julio Sebastián QuispePas encore d'évaluation
- Morfología Externa 2021Document87 pagesMorfología Externa 2021Andrea GalvanPas encore d'évaluation
- LIOSDocument3 pagesLIOSDaniMeC07Pas encore d'évaluation
- CHAJCHUDocument4 pagesCHAJCHUJhonMasterPas encore d'évaluation
- Taller 1 Semana 1 ArteeeeesDocument3 pagesTaller 1 Semana 1 ArteeeeesNicolasPC 25Pas encore d'évaluation
- Resumen Directiva de TesoreríaDocument2 pagesResumen Directiva de TesoreríaAlexandraPas encore d'évaluation
- Obra Completa Vol. 18.1. - La Vida Simbólica I (Carl Gustav Jung)Document448 pagesObra Completa Vol. 18.1. - La Vida Simbólica I (Carl Gustav Jung)tedioPas encore d'évaluation
- Desarrollo Semana 6 LogísticaDocument8 pagesDesarrollo Semana 6 LogísticaDanilo Herman Cisterna GonzalezPas encore d'évaluation
- Preoperacional Compactador (Canguro-Rana)Document1 pagePreoperacional Compactador (Canguro-Rana)alfa mikePas encore d'évaluation
- SSE 7 SECUNDARIA - Educación FísicaDocument8 pagesSSE 7 SECUNDARIA - Educación FísicasebastianPas encore d'évaluation
- Control 3Document6 pagesControl 3martinmunoztPas encore d'évaluation
- Normas EuroDocument6 pagesNormas EuroCATALINA BECERRA SANCHEZ100% (3)
- Algoritmos (Ejemplos)Document7 pagesAlgoritmos (Ejemplos)joseimejiasnPas encore d'évaluation