Vous aimerez peut-être aussi
- Exercício 3 - SubamortecidoDocument7 pagesExercício 3 - SubamortecidoLuan Kalil MoraesPas encore d'évaluation
- Exercício 2 - Amortecimento CriticoDocument5 pagesExercício 2 - Amortecimento CriticoLuan Kalil MoraesPas encore d'évaluation
- Equações Diferenciais de 1a OrdemDocument14 pagesEquações Diferenciais de 1a OrdemRodrigo CostaPas encore d'évaluation
- Derivacao ImplicitaDocument4 pagesDerivacao ImplicitaHildo Cipriano SouzaPas encore d'évaluation
- APLICAÇÕES EDOsDocument14 pagesAPLICAÇÕES EDOsJonathan Costa PereiraPas encore d'évaluation
- Apostila de Edo PDFDocument15 pagesApostila de Edo PDFJeff SilvaPas encore d'évaluation
- Gabarito Prova2 Sexta NoturnoDocument8 pagesGabarito Prova2 Sexta NoturnoElelelPas encore d'évaluation
- Exame Normal - Analise MatematicaDocument4 pagesExame Normal - Analise Matematicarodrigues.profissional55Pas encore d'évaluation
- Ficha1 2122s1Document15 pagesFicha1 2122s1Diogo SilvaPas encore d'évaluation
- Equações Diferenciais Final Parte 1Document21 pagesEquações Diferenciais Final Parte 1IgorPas encore d'évaluation
- Ficha1 2122Document14 pagesFicha1 2122Emília Morgado SantosPas encore d'évaluation
- P3 Lista 5 v3Document4 pagesP3 Lista 5 v3Leonardo FarinaPas encore d'évaluation
- Lista1 2020Document4 pagesLista1 2020victorw63Pas encore d'évaluation
- Series EDO 3 Prova de MarivaldoDocument6 pagesSeries EDO 3 Prova de MarivaldoErvenney SilvestrePas encore d'évaluation
- 1 Lista de ExercíciosDocument10 pages1 Lista de ExercíciosAchylley ChrysPas encore d'évaluation
- P2-2014 - 2 IedoDocument5 pagesP2-2014 - 2 IedoLuiz MauricioPas encore d'évaluation
- P2 Gabarito 2019 1.Document5 pagesP2 Gabarito 2019 1.Ana FigueiredoPas encore d'évaluation
- FileDocument4 pagesFileMarcela Sarmento DiasPas encore d'évaluation
- AM3 16t2corDocument3 pagesAM3 16t2corrodrigues.profissional55Pas encore d'évaluation
- Gabarito p2Document6 pagesGabarito p2eduksoficialPas encore d'évaluation
- Metodos Quantitativos M Academico Janeiro de 2019 PDFDocument114 pagesMetodos Quantitativos M Academico Janeiro de 2019 PDFLucas PedrosaPas encore d'évaluation
- Guia T1-LabDocument4 pagesGuia T1-Labpedrofelixy662Pas encore d'évaluation
- Notasdeaula Semana6 Cálculo2Document5 pagesNotasdeaula Semana6 Cálculo2Juliana RosaPas encore d'évaluation
- Aulas de Equações Diferenciais Aplicadas IDocument4 pagesAulas de Equações Diferenciais Aplicadas IGustavo Alves RochaPas encore d'évaluation
- Aula - Equações Diferenciais - UfmaDocument25 pagesAula - Equações Diferenciais - UfmaDamdara FerreiraPas encore d'évaluation
- A04 07 01 PDFDocument4 pagesA04 07 01 PDFPedim SilvaPas encore d'évaluation
- Cálculo1 Unidade1 Aula3Document10 pagesCálculo1 Unidade1 Aula3Ana Carolina HonoratoPas encore d'évaluation
- CorreccaoV1 Teste2 UEM 2022Document3 pagesCorreccaoV1 Teste2 UEM 2022Helson CuambaPas encore d'évaluation
- Apostila - Semana 01Document12 pagesApostila - Semana 01Marcelo Lopes VieiraPas encore d'évaluation
- Comprimento Arco PDFDocument5 pagesComprimento Arco PDFArthur DaherPas encore d'évaluation
- Integração Das Equações de Movimento 27-03-23Document20 pagesIntegração Das Equações de Movimento 27-03-23JoaoPas encore d'évaluation
- Equacoes Diferenciais Elementar WilliamDocument29 pagesEquacoes Diferenciais Elementar WilliamDenilson Adelino CossaPas encore d'évaluation
- Lista 1 - EdpDocument5 pagesLista 1 - Edphelensantos102017Pas encore d'évaluation
- Simulado Equações Diferenciais IIDocument4 pagesSimulado Equações Diferenciais IIJefferson GarbinatoPas encore d'évaluation
- Lista 01Document3 pagesLista 01johão BagrielPas encore d'évaluation
- Exercicios Cdi3 2122Document10 pagesExercicios Cdi3 2122Paula Correia0% (1)
- Taxas Relacionadas (Exercícios Resolvidos)Document25 pagesTaxas Relacionadas (Exercícios Resolvidos)Diego Oliveira86% (37)
- Lista 2.8Document2 pagesLista 2.8MarcosPas encore d'évaluation
- Apostila MatIVparte1Document16 pagesApostila MatIVparte1Guilherme NehmePas encore d'évaluation
- C2 - Parte I - Semana 1 - Lista de Exercicios (Solução)Document10 pagesC2 - Parte I - Semana 1 - Lista de Exercicios (Solução)RaizenPas encore d'évaluation
- Ficha1 2324s1 ResDocument7 pagesFicha1 2324s1 ResEmília Morgado SantosPas encore d'évaluation
- Primeira Lista de ExerciciosDocument3 pagesPrimeira Lista de ExerciciosSamantha CarlaPas encore d'évaluation
- Apostila 1Document16 pagesApostila 1Larissa Do ValePas encore d'évaluation
- Trabalho I de EDODocument4 pagesTrabalho I de EDOMiii BergalliPas encore d'évaluation
- E1 Edo SeparaveisDocument6 pagesE1 Edo SeparaveisRoger Jatobá RodriguesPas encore d'évaluation
- 2022.2 AP1 CI GabaritoDocument5 pages2022.2 AP1 CI GabaritoVitorPas encore d'évaluation
- Integrais IndefinidasDocument4 pagesIntegrais Indefinidaspedro ayanePas encore d'évaluation
- Aula 28 e 29Document14 pagesAula 28 e 29Gabriel de jesusPas encore d'évaluation
- Integral IdaDocument7 pagesIntegral IdaaudinhamPas encore d'évaluation
- PRIMITIVAS - Lista 1 - Integrais - 20231Document2 pagesPRIMITIVAS - Lista 1 - Integrais - 20231Bruno LuzPas encore d'évaluation
- Guia T2 Amiii PLDocument4 pagesGuia T2 Amiii PLvark-x piterPas encore d'évaluation
- Aula 14 e 15Document8 pagesAula 14 e 15Gabriel de jesusPas encore d'évaluation
- S3 - Simulado - Séries e Equações DiferenciaisDocument3 pagesS3 - Simulado - Séries e Equações DiferenciaisartimontejoaoPas encore d'évaluation
- CAME Folha 2Document1 pageCAME Folha 2CláudiaCoutinhoPas encore d'évaluation
- Solucionário (Incompleto) - Nivaldo Lemos - Mecânica Clássica 1Document11 pagesSolucionário (Incompleto) - Nivaldo Lemos - Mecânica Clássica 1Filipe MenezesPas encore d'évaluation
- Mat2456 L3 2023Document7 pagesMat2456 L3 2023Vinicius SoaresPas encore d'évaluation
- Robótica e Automação - Planejamento de TrajetóriaDocument9 pagesRobótica e Automação - Planejamento de TrajetóriaRodrigo CostaPas encore d'évaluation
- Robótica e Automação - Cinemática InversaDocument36 pagesRobótica e Automação - Cinemática InversaRodrigo CostaPas encore d'évaluation
- Robótica e Automação - Dinamica de Um ManipuladorDocument59 pagesRobótica e Automação - Dinamica de Um ManipuladorRodrigo CostaPas encore d'évaluation
- Robótica e Automação - Cinemática DiferencialDocument67 pagesRobótica e Automação - Cinemática DiferencialRodrigo CostaPas encore d'évaluation
- Robótica e Automação - Movimento de Um Corpo RıgidoDocument50 pagesRobótica e Automação - Movimento de Um Corpo RıgidoRodrigo CostaPas encore d'évaluation
- Robótica e Automação - Controle de ManipuladoresDocument34 pagesRobótica e Automação - Controle de ManipuladoresRodrigo CostaPas encore d'évaluation
- Robótica e Automação - Cinemática DiretaDocument43 pagesRobótica e Automação - Cinemática DiretaRodrigo CostaPas encore d'évaluation
- Robótica e Automação - Cinemática Inversa 2Document36 pagesRobótica e Automação - Cinemática Inversa 2Rodrigo CostaPas encore d'évaluation
- Robótica e Automação - Aula 01 - UFRJDocument47 pagesRobótica e Automação - Aula 01 - UFRJRodrigo CostaPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 08Document8 pagesCIRCUITOS LÓGICOS - Aula 08Rodrigo CostaPas encore d'évaluation
- Robótica e Automação - Controle CinemáticoDocument27 pagesRobótica e Automação - Controle CinemáticoRodrigo CostaPas encore d'évaluation
- 02algebra PDFDocument25 pages02algebra PDFRodrigo CostaPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 09Document26 pagesCIRCUITOS LÓGICOS - Aula 09Rodrigo CostaPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 11Document6 pagesCIRCUITOS LÓGICOS - Aula 11Rodrigo CostaPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 07Document9 pagesCIRCUITOS LÓGICOS - Aula 07Rodrigo CostaPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 03Document20 pagesCIRCUITOS LÓGICOS - Aula 03Rodrigo CostaPas encore d'évaluation
- CL M5 PDFDocument17 pagesCL M5 PDFjeffersongomesandradPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 10Document11 pagesCIRCUITOS LÓGICOS - Aula 10Rodrigo CostaPas encore d'évaluation
- CL M1 PDFDocument7 pagesCL M1 PDFRodrigo CostaPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 06Document11 pagesCIRCUITOS LÓGICOS - Aula 06Rodrigo CostaPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 04Document7 pagesCIRCUITOS LÓGICOS - Aula 04Rodrigo CostaPas encore d'évaluation
- CIRCUITOS LÓGICOS - Aula 03Document18 pagesCIRCUITOS LÓGICOS - Aula 03Rodrigo CostaPas encore d'évaluation
- CL M1 PDFDocument7 pagesCL M1 PDFRodrigo CostaPas encore d'évaluation
- Circuitos LógicosDocument4 pagesCircuitos LógicosRodrigo CostaPas encore d'évaluation
- ListassasDocument20 pagesListassasGabriel RamosPas encore d'évaluation
- 7 AssíntotasDocument3 pages7 AssíntotasdorinamendoncaPas encore d'évaluation
- Otimizacao Nao LinearDocument91 pagesOtimizacao Nao LinearAngela Adelaide Pinto da CostaPas encore d'évaluation
- Instrucoes Bula Pratica Toxoplasmose IggDocument2 pagesInstrucoes Bula Pratica Toxoplasmose IggSAMARAH SANTOSPas encore d'évaluation
- 2013 1 Analise RN Prova 1 GabaritoDocument2 pages2013 1 Analise RN Prova 1 GabaritoLuis Anthony Miñope GaonaPas encore d'évaluation
- GujaratiCap3 Hipoteses MCRLDocument6 pagesGujaratiCap3 Hipoteses MCRLDaniel gamerPas encore d'évaluation
- Extremos de Funções de Uma VariávelDocument10 pagesExtremos de Funções de Uma VariávelVictor Oliveira NunesPas encore d'évaluation
- Aulas Derivadas ParciaisDocument69 pagesAulas Derivadas ParciaisWilliam MartinsPas encore d'évaluation
- EngCompProd2017 MCA503CalculoIII P3 GABARITO PDFDocument3 pagesEngCompProd2017 MCA503CalculoIII P3 GABARITO PDFIsis StrucklPas encore d'évaluation
- Riemanniana - Caminha PDFDocument466 pagesRiemanniana - Caminha PDFCarlos MaurícioPas encore d'évaluation
- Lista 1 Resolvida - Análise IIDocument9 pagesLista 1 Resolvida - Análise IIVinicius Pinheiro BentoPas encore d'évaluation
- Atividade para Nota - AF 3 1Document3 pagesAtividade para Nota - AF 3 1Sidnei Leite de Camargo FilhoqPas encore d'évaluation
- Descomplica Mapa Mental Matematica PDFDocument7 pagesDescomplica Mapa Mental Matematica PDFLUCAS ANTONIO LOPES NEVES100% (3)
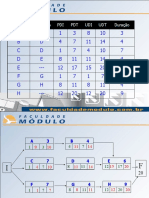
- Gestao - de - Projetos - 6 - CPMDocument6 pagesGestao - de - Projetos - 6 - CPMFlávio AnunciatoPas encore d'évaluation
- Atividade Pontuada 01 - Bimestre 01Document3 pagesAtividade Pontuada 01 - Bimestre 01Filipe Barreto (Lipe Master)Pas encore d'évaluation
- Introdução A Função - 1º Ano José Roberto Costa BorgesDocument3 pagesIntrodução A Função - 1º Ano José Roberto Costa BorgesCamila BorgesPas encore d'évaluation
- Kalid Sintonia Lambda-PDocument4 pagesKalid Sintonia Lambda-PMarcelo Andrade SantiagoPas encore d'évaluation
- DerivadasDocument14 pagesDerivadasandresplataPas encore d'évaluation
- 2 - Transformada de Laplace Aplicada A Circuitos Elétricos PDFDocument6 pages2 - Transformada de Laplace Aplicada A Circuitos Elétricos PDFLuiz Cezar WanderleyPas encore d'évaluation
- Exercícios ANPECDocument11 pagesExercícios ANPECCarlisson CorreiaPas encore d'évaluation
- Trabalho de Estatística DescritivaDocument19 pagesTrabalho de Estatística DescritivaIgor de Mello50% (2)
- Condições KKTDocument24 pagesCondições KKTMurilo CamargosPas encore d'évaluation
- Trabalho 2 de Cálculo Infinitesimal - em GrupoDocument19 pagesTrabalho 2 de Cálculo Infinitesimal - em GrupoJorge AmedePas encore d'évaluation
- Calibra o de CalibradoresDocument3 pagesCalibra o de CalibradoresHelmut Ricardo SommerfeldtPas encore d'évaluation
- Exercício LimtesDocument12 pagesExercício LimtesDoce DesejoPas encore d'évaluation
- Lista 7 - FatorialDocument2 pagesLista 7 - FatorialIvan Monteiro100% (1)
- Lista de Exercícios Álgebra LinearDocument12 pagesLista de Exercícios Álgebra LinearServi LastniPas encore d'évaluation