Vous aimerez peut-être aussi
- Welding Visual Inspection and Tools PDFDocument21 pagesWelding Visual Inspection and Tools PDFtoby100% (3)
- PSV Calculation Sheet APIDocument10 pagesPSV Calculation Sheet APIionutlaur86100% (2)
- E2412 PDFDocument22 pagesE2412 PDFAhmad Zubair RasulyPas encore d'évaluation
- 2 - Thermal Energy Storage Systems PDFDocument21 pages2 - Thermal Energy Storage Systems PDFVitalremainsPas encore d'évaluation
- Solution Manual for an Introduction to Equilibrium ThermodynamicsD'EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsPas encore d'évaluation
- Cheat Sheet - Exam 3Document20 pagesCheat Sheet - Exam 3textbookwhorePas encore d'évaluation
- SSP 190 Adjustable TurbochargerDocument32 pagesSSP 190 Adjustable TurbochargerDamir Miholić100% (1)
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsD'EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsPas encore d'évaluation
- Processing of Bopp FilmDocument49 pagesProcessing of Bopp FilmHassan Ali Khan75% (8)
- Navsea S9074-Aq-Gib-010-248Document137 pagesNavsea S9074-Aq-Gib-010-248Brenno Moura MouraPas encore d'évaluation
- Template Wet Riser CalculationDocument2 pagesTemplate Wet Riser CalculationAshar HassanPas encore d'évaluation
- Plane Waves in Lossy DielectricDocument17 pagesPlane Waves in Lossy DielectricchoiyennPas encore d'évaluation
- Sonar Introduction 2012 Compressed PDFDocument11 pagesSonar Introduction 2012 Compressed PDFBrenno Moura MouraPas encore d'évaluation
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterD'EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterPas encore d'évaluation
- Science: Quarter 3 - Module 2: The Phase ChangeDocument24 pagesScience: Quarter 3 - Module 2: The Phase ChangeJomari Palang-at Carnecer67% (3)
- Basic Physics of Underwater AcousticsDocument14 pagesBasic Physics of Underwater AcousticsDr. Ir. R. Didin Kusdian, MT.Pas encore d'évaluation
- Chapter 2. Acoustics, Sound Waves, Noise and TsunamisDocument16 pagesChapter 2. Acoustics, Sound Waves, Noise and TsunamisMuhamad Zahwan AnwarPas encore d'évaluation
- Chapter1-Physical Principles of Quantum MechanicsDocument12 pagesChapter1-Physical Principles of Quantum MechanicsIda ItriesnaPas encore d'évaluation
- 1 - Definitions Measurement Procedures and Composite WallsDocument23 pages1 - Definitions Measurement Procedures and Composite WallsDrowsy CrowsPas encore d'évaluation
- This Page Will Be Attached To Your Exams: Physics 7E Formula SheetDocument1 pageThis Page Will Be Attached To Your Exams: Physics 7E Formula SheetAhmed ZobiPas encore d'évaluation
- Kichael Carley Acoustics-11-23Document13 pagesKichael Carley Acoustics-11-23eki7777Pas encore d'évaluation
- Boddeker's PHY132 Lecture14Document4 pagesBoddeker's PHY132 Lecture14bitconcepts9781Pas encore d'évaluation
- Physics Formulas & SI UnitDocument14 pagesPhysics Formulas & SI Unitönemsiz biriPas encore d'évaluation
- CH3 PDFDocument41 pagesCH3 PDFOliver PerezPas encore d'évaluation
- 2.065/2.066 Acoustics and Sensing: Massachusetts Institute of TechnologyDocument12 pages2.065/2.066 Acoustics and Sensing: Massachusetts Institute of TechnologyKurran SinghPas encore d'évaluation
- 02 Experiment Manual 2 Determination of The Sound Wave Velocity With The Method of Lissajous Figures PDFDocument5 pages02 Experiment Manual 2 Determination of The Sound Wave Velocity With The Method of Lissajous Figures PDFNikko GalarosaPas encore d'évaluation
- Physics Unit One FormulaDocument32 pagesPhysics Unit One FormulaAHKEEL LESTER JONESPas encore d'évaluation
- PHYS1131 Solutions Tut 6 11Document14 pagesPHYS1131 Solutions Tut 6 11Jason Tan100% (2)
- Microsoft Powerpoint - 3-Introduction To Dynamic AnalysisDocument37 pagesMicrosoft Powerpoint - 3-Introduction To Dynamic AnalysisyuchuniePas encore d'évaluation
- Z Transform Model of The Vocal Tract (023-028)Document32 pagesZ Transform Model of The Vocal Tract (023-028)prathikPas encore d'évaluation
- Waveguide Assignment 1Document8 pagesWaveguide Assignment 1COLLINS KIPROPPas encore d'évaluation
- Category: Physics FormulasDocument24 pagesCategory: Physics FormulasKalpana ShankarPas encore d'évaluation
- Cheat SheetDocument2 pagesCheat SheetPeter KoszoPas encore d'évaluation
- Mechanics Formulae For Physics Proficiency Exams: Motion, Forces, Work, Energy and MomentumDocument4 pagesMechanics Formulae For Physics Proficiency Exams: Motion, Forces, Work, Energy and MomentumeiufjojPas encore d'évaluation
- De-Broglie HypothesisDocument19 pagesDe-Broglie HypothesisAmanda BoltonPas encore d'évaluation
- 2900 - 4. FMEC Nozzle Theory PDFDocument46 pages2900 - 4. FMEC Nozzle Theory PDFMohmmmad HussainPas encore d'évaluation
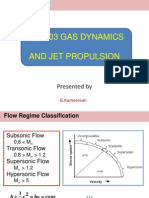
- Me 1303 Gas Dynamics and Jet Propulsion: Presented byDocument24 pagesMe 1303 Gas Dynamics and Jet Propulsion: Presented byArul SankaranPas encore d'évaluation
- Formula SheetDocument7 pagesFormula SheetCarlos GómezPas encore d'évaluation
- Formula SheetDocument1 pageFormula SheetAlessandro TozcanoPas encore d'évaluation
- QMDocument10 pagesQMKarthikeyan ShunmugavelPas encore d'évaluation
- Physics Class 9 FormulasDocument13 pagesPhysics Class 9 FormulasEKLABAY SONIPas encore d'évaluation
- Lecture 11Document19 pagesLecture 11JayeshAtreyaPas encore d'évaluation
- Mass Transfer by Migration & Diffusion (Ch. 4)Document16 pagesMass Transfer by Migration & Diffusion (Ch. 4)Shekel DeninoPas encore d'évaluation
- 3 - Single Leaf WallsDocument17 pages3 - Single Leaf WallsDrowsy CrowsPas encore d'évaluation
- Appendix C C. Formulae A. Chapter 1 Relations: E 2 - 14 3 2 2 2 E 24 E 6 2 C M 2 F Avog 26 26Document17 pagesAppendix C C. Formulae A. Chapter 1 Relations: E 2 - 14 3 2 2 2 E 24 E 6 2 C M 2 F Avog 26 26Ferry BudiPas encore d'évaluation
- Remote Sensing Fundamentals Day2Document48 pagesRemote Sensing Fundamentals Day2Va SuPas encore d'évaluation
- Wave Equation - Lecture NoteDocument42 pagesWave Equation - Lecture NoteFredo YolendraPas encore d'évaluation
- Physics Formulas: G G (1-d) RDocument6 pagesPhysics Formulas: G G (1-d) RAitazaz AhsanPas encore d'évaluation
- Introduction To Radiowave Propagation: DR Costas ConstantinouDocument55 pagesIntroduction To Radiowave Propagation: DR Costas ConstantinouRenato MangilaPas encore d'évaluation
- 2018 PU3 H2 PHY PE2 Mark Scheme: Paper 1 (30 Marks)Document3 pages2018 PU3 H2 PHY PE2 Mark Scheme: Paper 1 (30 Marks)Kok Soon ChongPas encore d'évaluation
- Assignment Solutions11111 PDFDocument6 pagesAssignment Solutions11111 PDFshazmina 44Pas encore d'évaluation
- Chapter 2Document80 pagesChapter 2El Roy M.T.Pas encore d'évaluation
- Chap 15Document18 pagesChap 15Tanuj Sethi100% (2)
- Physics of Acoustic Wave PropagationDocument26 pagesPhysics of Acoustic Wave PropagationIndra RudiantoPas encore d'évaluation
- Finite Difference Time Domain Method For Acoustic Waves in Attebuate and Absorptive Medium For Layered Underwater Acoustic EnvironmentsDocument9 pagesFinite Difference Time Domain Method For Acoustic Waves in Attebuate and Absorptive Medium For Layered Underwater Acoustic EnvironmentsBrenno Moura MouraPas encore d'évaluation
- Chun Wa Wong Quantum Mech RVW 2Document29 pagesChun Wa Wong Quantum Mech RVW 2jeff_hammonds351Pas encore d'évaluation
- Chap 4 PDFDocument40 pagesChap 4 PDFxongassilvaPas encore d'évaluation
- Physics Class 9 FormulasDocument13 pagesPhysics Class 9 FormulasJatin Gupta73% (63)
- 2010 VJC Physics Prelim H2 P1Document18 pages2010 VJC Physics Prelim H2 P1cjcsucksPas encore d'évaluation
- Appendix C C. Formulae A. Chapter 1 Relations: E 2 - 14 3 2 2 2 E 24 E 6 2 C M 2 F Avog 26 26Document17 pagesAppendix C C. Formulae A. Chapter 1 Relations: E 2 - 14 3 2 2 2 E 24 E 6 2 C M 2 F Avog 26 26Ivelin ValchevPas encore d'évaluation
- Che 323 Note Heat ConductionDocument5 pagesChe 323 Note Heat ConductionifiokPas encore d'évaluation
- Bütün Fizik FormülleriDocument13 pagesBütün Fizik Formüllerimhasan13Pas encore d'évaluation
- MIT OCW Wave Propagation Lecture Part 3Document47 pagesMIT OCW Wave Propagation Lecture Part 3Mohan NayakaPas encore d'évaluation
- Lesson 11 SOUNDSDocument7 pagesLesson 11 SOUNDSDianna GwennPas encore d'évaluation
- Heat Transfer FormulasDocument2 pagesHeat Transfer FormulasBipin RohitPas encore d'évaluation
- (Continued) : The Laws of Electromagnetism Maxwell's Equations Displacement CurrentDocument21 pages(Continued) : The Laws of Electromagnetism Maxwell's Equations Displacement CurrentJai ChangPas encore d'évaluation
- Physics PhlashcardsDocument8 pagesPhysics PhlashcardsAsha ElsberryPas encore d'évaluation
- Unit Iv OcnDocument39 pagesUnit Iv OcnGunasekaran PPas encore d'évaluation
- Controlled-Current Techniques (Ch. 8)Document29 pagesControlled-Current Techniques (Ch. 8)GIRMA SELALE GELETAPas encore d'évaluation
- Wolfgang Rathgeber, Kai-Uwe Schrogl, Ray A. Williamson - The Fair and Responsible Use of SpaceDocument274 pagesWolfgang Rathgeber, Kai-Uwe Schrogl, Ray A. Williamson - The Fair and Responsible Use of SpaceBrenno Moura MouraPas encore d'évaluation
- Finite Difference Time Domain Method For Acoustic Waves in Attebuate and Absorptive Medium For Layered Underwater Acoustic EnvironmentsDocument9 pagesFinite Difference Time Domain Method For Acoustic Waves in Attebuate and Absorptive Medium For Layered Underwater Acoustic EnvironmentsBrenno Moura MouraPas encore d'évaluation
- DDS 170 0 Mast DesignDocument88 pagesDDS 170 0 Mast DesignBrenno Moura MouraPas encore d'évaluation
- Eth 7837 02 PDFDocument108 pagesEth 7837 02 PDFBrenno Moura MouraPas encore d'évaluation
- Guruswamy G A Review of Numerical Fluids Structures Interface Methods For Computations Using High-Fidelity EquationsDocument11 pagesGuruswamy G A Review of Numerical Fluids Structures Interface Methods For Computations Using High-Fidelity EquationsBrenno Moura MouraPas encore d'évaluation
- Queensland SpecDev HandbookDocument20 pagesQueensland SpecDev HandbookBrenno Moura MouraPas encore d'évaluation
- General Contract Specification ProceduresDocument14 pagesGeneral Contract Specification ProceduresBrenno Moura MouraPas encore d'évaluation
- Outflow PerformanceDocument2 pagesOutflow PerformanceMuhammad MujahidPas encore d'évaluation
- Overall Thermal Transfer Value (Ottv) : Building Council IndonesiaDocument35 pagesOverall Thermal Transfer Value (Ottv) : Building Council Indonesiarusli bahtiarPas encore d'évaluation
- 3 Periodical Examination S.Y. 2018-2019 Science VI: Umingan Central Elementary SchoolDocument4 pages3 Periodical Examination S.Y. 2018-2019 Science VI: Umingan Central Elementary SchoolPrincis CianoPas encore d'évaluation
- Geotechnical Engineering - I PDFDocument3 pagesGeotechnical Engineering - I PDFSunny PrajapatiPas encore d'évaluation
- IOE Syllabus (Civil-2nd Year)Document29 pagesIOE Syllabus (Civil-2nd Year)SibeshKumarSingh67% (3)
- Identification of BR and NBR Using A TGA-FTIR Combination: PurposeDocument4 pagesIdentification of BR and NBR Using A TGA-FTIR Combination: Purposelely dwiPas encore d'évaluation
- Tunneling-Like Wave Transmission in Non-Hermitian Lattices With Mirrored NonreciprocityDocument6 pagesTunneling-Like Wave Transmission in Non-Hermitian Lattices With Mirrored Nonreciprocitydonniedarko817Pas encore d'évaluation
- Basic InstrumentationDocument59 pagesBasic Instrumentationjudegj100% (1)
- Navigatie Maritima. Meteorologie. OceanografieDocument361 pagesNavigatie Maritima. Meteorologie. OceanografieIonut LecaPas encore d'évaluation
- DENSITYDocument9 pagesDENSITYJonaver RebitePas encore d'évaluation
- Indian Standard: Methods of Test For Petroleum and Its ProductsDocument8 pagesIndian Standard: Methods of Test For Petroleum and Its ProductsjayantPas encore d'évaluation
- Hydrosphere Notes GeoDocument8 pagesHydrosphere Notes GeoMary Ingrid BumatayPas encore d'évaluation
- Earths Climate Past and Future 3rd Edition Ruddiman Solutions ManualDocument3 pagesEarths Climate Past and Future 3rd Edition Ruddiman Solutions Manualheulwenfidelma2dg5100% (29)
- Maximize Beverage Emulsion Productivity (PURITY GUM® ULTRA) White PaperDocument4 pagesMaximize Beverage Emulsion Productivity (PURITY GUM® ULTRA) White PaperIngredion Knowledge Bank100% (1)
- Mechanics of SolidsDocument15 pagesMechanics of Solidsselva1975Pas encore d'évaluation
- Interatomic DistanceDocument3 pagesInteratomic DistanceisaacPas encore d'évaluation
- Final PaperDocument8 pagesFinal PaperROCKET BOYS 2K18Pas encore d'évaluation
- Screening 7Document4 pagesScreening 7Ramon Dela CruzPas encore d'évaluation
- Spe 52157Document30 pagesSpe 52157budiPas encore d'évaluation
- Basics NWP and ApplicationDocument20 pagesBasics NWP and ApplicationCasetome IdPas encore d'évaluation
- 1Document5 pages1Dee HsPas encore d'évaluation
- Tickling Test of RC1536 With Z&S Water Based Ink Rev05Document10 pagesTickling Test of RC1536 With Z&S Water Based Ink Rev05casanovaPas encore d'évaluation