Vous aimerez peut-être aussi
- Models For DC MotorsDocument8 pagesModels For DC MotorsebrahimpanPas encore d'évaluation
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanPas encore d'évaluation
- Sensors: Adaptive PIF Control For Permanent Magnet Synchronous Motors Based On GPCDocument18 pagesSensors: Adaptive PIF Control For Permanent Magnet Synchronous Motors Based On GPCebrahimpanPas encore d'évaluation
- Design and Implementation of A Distributed Variable Impedance Actuator Using Parallel Linear SpringsDocument12 pagesDesign and Implementation of A Distributed Variable Impedance Actuator Using Parallel Linear SpringsebrahimpanPas encore d'évaluation
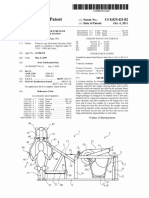
- United States Patent (10) Patent N6 US 8,029,424 B2: Thulin 45 Date of Patent: Oct. 4 2011Document15 pagesUnited States Patent (10) Patent N6 US 8,029,424 B2: Thulin 45 Date of Patent: Oct. 4 2011ebrahimpanPas encore d'évaluation
- Spring Over Muscle (SOM) Actuator For Rehabilitation DevicesDocument4 pagesSpring Over Muscle (SOM) Actuator For Rehabilitation DevicesebrahimpanPas encore d'évaluation
- Adaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsDocument14 pagesAdaptation of Multijoint Coordination During Standing Balance in Healthy Young and Healthy Old IndividualsebrahimpanPas encore d'évaluation
- Watanabe 2010Document4 pagesWatanabe 2010ebrahimpanPas encore d'évaluation
- An Assisted Waist Supporter For Vertebral RehabilitationDocument2 pagesAn Assisted Waist Supporter For Vertebral RehabilitationebrahimpanPas encore d'évaluation
- A Review of The Use of Electro-Motor Stimulation in Human MusclesDocument13 pagesA Review of The Use of Electro-Motor Stimulation in Human MusclesebrahimpanPas encore d'évaluation
- I M T: R F V: Sokinetic Uscle Esting Eflections ON Uture EnuesDocument6 pagesI M T: R F V: Sokinetic Uscle Esting Eflections ON Uture EnuesebrahimpanPas encore d'évaluation
- Strain CylindricalDocument4 pagesStrain CylindricalebrahimpanPas encore d'évaluation
- Zenoah g320rc Owners Manual DDMDocument28 pagesZenoah g320rc Owners Manual DDMSunthron SomchaiPas encore d'évaluation
- Tip Convolution Lang98Document5 pagesTip Convolution Lang98ebrahimpanPas encore d'évaluation
- Jomms 08Document20 pagesJomms 08ebrahimpanPas encore d'évaluation
- 06 Linear Elasticity 03 Anisotropy PDFDocument11 pages06 Linear Elasticity 03 Anisotropy PDFebrahimpanPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- .... Applicant Versus: Cri. Appln. No. 4353/16 & Anr. 1Document11 pages.... Applicant Versus: Cri. Appln. No. 4353/16 & Anr. 1Manashree EngineerPas encore d'évaluation
- Indian Standard: Application Guide For Voltage TransformersDocument16 pagesIndian Standard: Application Guide For Voltage TransformersGnanavel GPas encore d'évaluation
- Chapter 13 Managerial AccountingDocument168 pagesChapter 13 Managerial AccountingChandler Schleifs100% (4)
- Research On Strip Deformation in The Cage Roll-Forming Process of ERW Round PipesDocument7 pagesResearch On Strip Deformation in The Cage Roll-Forming Process of ERW Round PipesJames PhillipsPas encore d'évaluation
- PPP-B-676 e PDFDocument34 pagesPPP-B-676 e PDFffincher4203Pas encore d'évaluation
- VENUS e CatalogueDocument38 pagesVENUS e CatalogueGanesh BabuPas encore d'évaluation
- Reservoir Rock PropertiesDocument148 pagesReservoir Rock Propertiesiscribdusername100% (7)
- Traditional EmbroideryDocument38 pagesTraditional EmbroiderySabrina SuptiPas encore d'évaluation
- Nanotechnology ApplicationsDocument11 pagesNanotechnology ApplicationsDivya DivyachilaPas encore d'évaluation
- 12.1 ANSYS CompositePrepPostDocument2 pages12.1 ANSYS CompositePrepPostLakmal ArandaraPas encore d'évaluation
- Black Mamba Vs Mongoose Vs King Cobra Vs Komodo Vs PhythonDocument44 pagesBlack Mamba Vs Mongoose Vs King Cobra Vs Komodo Vs PhythonmarcPas encore d'évaluation
- Substation Battery ChargerDocument2 pagesSubstation Battery Chargercadtil0% (1)
- Fill in The Table by Determining The Functions of The Following ItemsDocument6 pagesFill in The Table by Determining The Functions of The Following ItemsJessabel CandidatoPas encore d'évaluation
- VIP45Document92 pagesVIP45Román IsraelPas encore d'évaluation
- Manual For Noncommissioned Officers and Privates of Infantry of The Army of The United StatesDocument250 pagesManual For Noncommissioned Officers and Privates of Infantry of The Army of The United StatesGutenberg.org100% (1)
- Eurolite Led TMH 7 PDFDocument2 pagesEurolite Led TMH 7 PDFSarahPas encore d'évaluation
- Construction Companies in AlbaniaDocument17 pagesConstruction Companies in AlbaniaPacific HRPas encore d'évaluation
- Lecture 9: Quarter-Wave-Transformer Matching.: R JZ L Z Z Z JR LDocument13 pagesLecture 9: Quarter-Wave-Transformer Matching.: R JZ L Z Z Z JR LRuth EnormePas encore d'évaluation
- Ansi/Isa - 75.08.04-2001 (R2013) Face-to-Face Dimensions For Buttweld-End Globe-Style Control Valves (Class 4500)Document16 pagesAnsi/Isa - 75.08.04-2001 (R2013) Face-to-Face Dimensions For Buttweld-End Globe-Style Control Valves (Class 4500)Horas CanmanPas encore d'évaluation
- Money, Interest, and Inflation: Answers To CheckpointsDocument16 pagesMoney, Interest, and Inflation: Answers To Checkpointsb96309Pas encore d'évaluation
- Sander Protein SkimmersDocument18 pagesSander Protein Skimmerslleimicojon100% (1)
- Backlash SDPDocument11 pagesBacklash SDPPatrick Cyr GagnéPas encore d'évaluation
- Fuk SecDocument1 pageFuk SecHirushan MenukaPas encore d'évaluation
- Brief List of Temples in Haridwar Is Given BelowDocument8 pagesBrief List of Temples in Haridwar Is Given BelowPritesh BamaniaPas encore d'évaluation
- Short Moritz - LiverGB PDFDocument3 pagesShort Moritz - LiverGB PDFPetra JobovaPas encore d'évaluation
- DA-42 Performance Calculator v2.3.1Document23 pagesDA-42 Performance Calculator v2.3.1DodgeHemi1Pas encore d'évaluation
- Curriculum Jaime Alvarado (Jaime Alvarado)Document3 pagesCurriculum Jaime Alvarado (Jaime Alvarado)yuly aldanaPas encore d'évaluation
- Notes StressDocument4 pagesNotes StressRohitKalraPas encore d'évaluation
- The Russian Review - 2020 - ROTH EY - Listening Out Listening For Listening in Cold War Radio Broadcasting and The LateDocument22 pagesThe Russian Review - 2020 - ROTH EY - Listening Out Listening For Listening in Cold War Radio Broadcasting and The LateOkawa TakeshiPas encore d'évaluation
- Wps Gtaw Monel b127 b164Document2 pagesWps Gtaw Monel b127 b164Srinivasan Muruganantham67% (3)