Vous aimerez peut-être aussi
- Filtros de ChebyshevDocument13 pagesFiltros de ChebyshevCarlosmMezaPas encore d'évaluation
- Calor EspecíficoDocument14 pagesCalor EspecíficoCarlosmMezaPas encore d'évaluation
- TRabajo OperativaDocument3 pagesTRabajo OperativaCarlosmMezaPas encore d'évaluation
- Filtros de ChebyshevDocument13 pagesFiltros de ChebyshevCarlosmMezaPas encore d'évaluation
- Problms-Resueltos SistemasDocument7 pagesProblms-Resueltos SistemasCarlosmMeza100% (1)
- Funciones Elementales Variable ComplejaDocument2 pagesFunciones Elementales Variable ComplejaCarlosmMezaPas encore d'évaluation
- Variable ComplejaDocument6 pagesVariable ComplejaCarlosmMezaPas encore d'évaluation
- CalorimetriaDocument6 pagesCalorimetriaCarlosmMezaPas encore d'évaluation
- Mate 2 Funciones VectorialesDocument37 pagesMate 2 Funciones VectorialesCarlosmMezaPas encore d'évaluation
- Fundamento TeóricoDocument4 pagesFundamento TeóricoCarlosmMezaPas encore d'évaluation
- CEPRE2012BDocument24 pagesCEPRE2012BCarlosmMezaPas encore d'évaluation
- CONCLUSIONES Labo Fisica Caida LibreDocument4 pagesCONCLUSIONES Labo Fisica Caida LibreCarlosmMeza67% (6)
- Comandos Circle y EllipseDocument13 pagesComandos Circle y EllipseCarlosmMezaPas encore d'évaluation
- Caso de EstudioDocument3 pagesCaso de Estudiovictordario_14467327Pas encore d'évaluation
- Bastidas JaimeDocument8 pagesBastidas JaimeDaniel CamiloPas encore d'évaluation
- Holquist y Clark - Bajtin Capítulo 3Document25 pagesHolquist y Clark - Bajtin Capítulo 3Nahuel Repetto100% (1)
- Me Separo y Ahora Que PDFDocument35 pagesMe Separo y Ahora Que PDFErika CardonaPas encore d'évaluation
- Infiltracion, HidrologiaDocument32 pagesInfiltracion, HidrologiaAbraham Palacios BitancurPas encore d'évaluation
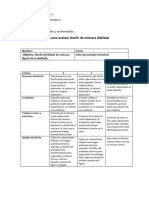
- Rubrica para Evaluar Diseño de MascaraDocument1 pageRubrica para Evaluar Diseño de MascaraLizbeth Alva GamarraPas encore d'évaluation
- Guía 10 Periodo 4 - Castellano Docente Maryoris PeralesDocument2 pagesGuía 10 Periodo 4 - Castellano Docente Maryoris Peralesalexis leivaPas encore d'évaluation
- De Fuentes y Guzmán, 1883. Recordación Flórida Tomo IIDocument466 pagesDe Fuentes y Guzmán, 1883. Recordación Flórida Tomo IISimon LatendressePas encore d'évaluation
- Andar Como Es Digno Del SeñorDocument4 pagesAndar Como Es Digno Del SeñorGeovanny-Jenny Jácome ZambranoPas encore d'évaluation
- Mejoramiento Procesos AdministrativosDocument159 pagesMejoramiento Procesos AdministrativosJaime Yapu ChuraPas encore d'évaluation
- Expresar Sentimientos - Juego Con CartasDocument29 pagesExpresar Sentimientos - Juego Con CartasRaquel Dávila FloresPas encore d'évaluation
- Los Tres Momentos de La ClaseDocument2 pagesLos Tres Momentos de La ClasepcjmPas encore d'évaluation
- Christie, Agatha - Destino DesconocidoDocument198 pagesChristie, Agatha - Destino DesconocidoArmando Lopez FuentesPas encore d'évaluation
- El Análisis de La Causa RaízDocument5 pagesEl Análisis de La Causa RaízAnonymous hVlHBtoHTPas encore d'évaluation
- Examen y Tarea Historia Universal 23 AgostoDocument4 pagesExamen y Tarea Historia Universal 23 AgostoMauricio SaraviaPas encore d'évaluation
- Test de La Figura Humana AutismoDocument90 pagesTest de La Figura Humana AutismoLuisa Fernanda Cardenas Calderon100% (2)
- Neonatología - PerinatologiaDocument33 pagesNeonatología - PerinatologiaMilagros Barrientos RiverosPas encore d'évaluation
- Examen VANDocument2 pagesExamen VANCarolina V100% (1)
- Misericordia Una Oportunidad de VivirDocument77 pagesMisericordia Una Oportunidad de VivirInácio JoséPas encore d'évaluation
- Magnetostatica Materia PDFDocument26 pagesMagnetostatica Materia PDFIvan RengifoPas encore d'évaluation
- Lección 1 Temas de Filosofía.Document3 pagesLección 1 Temas de Filosofía.BRENDA ROMERO JIM�NEZPas encore d'évaluation
- Palafoxia Texana DCDocument77 pagesPalafoxia Texana DCShizue OnoderaPas encore d'évaluation
- Ejercicios Resueltos Estructura LewisDocument12 pagesEjercicios Resueltos Estructura Lewisisalvador2283% (6)
- 2.6. División Politica InternacionalDocument69 pages2.6. División Politica InternacionalOscar Mendiola100% (4)
- Album Palabras Verano PDFDocument14 pagesAlbum Palabras Verano PDFMaria Gallart AlvarezPas encore d'évaluation
- Laboratorio 6 de QuimicaDocument20 pagesLaboratorio 6 de QuimicaAndrews Alexander Erazo RondinelPas encore d'évaluation
- Sílabo de Contabilidad Basica Utelvt 2018Document10 pagesSílabo de Contabilidad Basica Utelvt 2018patrick1179Pas encore d'évaluation
- 14 15 La Muerte de Las Palabras - Alumno - SolucionesDocument4 pages14 15 La Muerte de Las Palabras - Alumno - SolucionesaromeoPas encore d'évaluation
- Clases Sociales y Lucha de Clases en El CapitalismoDocument88 pagesClases Sociales y Lucha de Clases en El CapitalismoAndresPas encore d'évaluation