Vous aimerez peut-être aussi
- Programming Real-Time Systems With C/C++ and POSIX: Michael González HarbourDocument9 pagesProgramming Real-Time Systems With C/C++ and POSIX: Michael González HarbourGaetan LPas encore d'évaluation
- Introductory ACCircuit TheoryDocument193 pagesIntroductory ACCircuit Theorythirumalai22Pas encore d'évaluation
- Solaris Process ManagementDocument11 pagesSolaris Process ManagementSelva Kumar SK100% (1)
- Rexx 1Document115 pagesRexx 1Deepak Dada100% (1)
- Multithreading in PythonDocument5 pagesMultithreading in PythonTanoy BosePas encore d'évaluation
- Real-Time Operating Systems An Ongoing ReviewDocument4 pagesReal-Time Operating Systems An Ongoing Reviewsharath_rakkiPas encore d'évaluation
- Advanced AIXDocument20 pagesAdvanced AIXVel_stPas encore d'évaluation
- NuttX RTOSDocument6 pagesNuttX RTOSAlan CarvalhoPas encore d'évaluation
- Software System Engineering-ThayerDocument5 pagesSoftware System Engineering-ThayergoutambiswaPas encore d'évaluation
- Rtos ComparisonDocument44 pagesRtos ComparisonKarthikeyan TPas encore d'évaluation
- Real Time Operating SystemsDocument44 pagesReal Time Operating SystemsAnand PatraPas encore d'évaluation
- Embedded Linux ServerDocument10 pagesEmbedded Linux ServerJaymit ShahPas encore d'évaluation
- #01 KNX ArchitectureDocument35 pages#01 KNX ArchitectureMircea Remus AndonePas encore d'évaluation
- RT LinuxDocument11 pagesRT LinuxKevinXavierPas encore d'évaluation
- POSIXDocument10 pagesPOSIXAndres R. BucheliPas encore d'évaluation
- POSIX and Linux Application Compatibility Final - V1.0Document19 pagesPOSIX and Linux Application Compatibility Final - V1.0Mahendra Pratap SinghPas encore d'évaluation
- RtosDocument42 pagesRtospipul36Pas encore d'évaluation
- The POSIX Family of Standards: Stephen R. WalliDocument7 pagesThe POSIX Family of Standards: Stephen R. WalliSwati Sharma VaishnavPas encore d'évaluation
- Yawar TitalyryrtDocument6 pagesYawar TitalyryrtMalik RamzanPas encore d'évaluation
- History of Operating SystemsDocument6 pagesHistory of Operating SystemsMarek SulichPas encore d'évaluation
- Real Time OS PresentationDocument15 pagesReal Time OS PresentationSaro VrsPas encore d'évaluation
- Study 2 POSIX RealTime ExtensionDocument11 pagesStudy 2 POSIX RealTime ExtensionthangmlePas encore d'évaluation
- Major Project ReportDocument22 pagesMajor Project ReportkishorePas encore d'évaluation
- Mainframe operating systems beyond IBM's OS/360Document6 pagesMainframe operating systems beyond IBM's OS/360Md. Shahajada Imran 1520675642Pas encore d'évaluation
- P SOSDocument4 pagesP SOSapi-19457121Pas encore d'évaluation
- LynxosDocument4 pagesLynxosRonak DoshiPas encore d'évaluation
- UNIX Uni1 Class NotesDocument22 pagesUNIX Uni1 Class NotessanthoshaimitPas encore d'évaluation
- Lec 1 IntroDocument48 pagesLec 1 IntroSri Anjaneya NPas encore d'évaluation
- Standards (7) - C - UNIX Standards - Linux Man PageDocument4 pagesStandards (7) - C - UNIX Standards - Linux Man Pagepaolo the best(ia)Pas encore d'évaluation
- PT Topic 4Document7 pagesPT Topic 4Cindy CortezPas encore d'évaluation
- Secure Portability: October 2005Document13 pagesSecure Portability: October 2005Harry TLPas encore d'évaluation
- P01 RTLinuxDocument26 pagesP01 RTLinuxSudheer Reddy100% (1)
- UNIX Is A Command Line Operating System Written in The C Programming LanguageDocument35 pagesUNIX Is A Command Line Operating System Written in The C Programming LanguagesampathvnkPas encore d'évaluation
- The Unix System: Multi-User Multi-TaskingDocument24 pagesThe Unix System: Multi-User Multi-TaskingYajna PrasadPas encore d'évaluation
- RT Linux - AimsDocument29 pagesRT Linux - AimsswathiPas encore d'évaluation
- A User Friendly Classification & Analysis of Real Time Operating SystemDocument6 pagesA User Friendly Classification & Analysis of Real Time Operating SystemNamrata DhamalPas encore d'évaluation
- Embedded Linux - Ready For Real-Time - MontaVistaDocument13 pagesEmbedded Linux - Ready For Real-Time - MontaVistazelazniPas encore d'évaluation
- Priority Inversion Problem PaperDocument6 pagesPriority Inversion Problem PaperjayanthimurthyPas encore d'évaluation
- Embedded Operating SystemsDocument34 pagesEmbedded Operating SystemssanssecoursPas encore d'évaluation
- We Bi 001Document3 pagesWe Bi 001সঞ্জয় মাহাতোPas encore d'évaluation
- UNIX PracticalDocument22 pagesUNIX Practical[L]Akshat ModiPas encore d'évaluation
- Shell ProgDocument43 pagesShell ProgsujithamohanPas encore d'évaluation
- Project Beyond: Net OSDocument14 pagesProject Beyond: Net OSCarlos KillpackPas encore d'évaluation
- Case Study in RtlinuxDocument5 pagesCase Study in Rtlinuxajith shettyPas encore d'évaluation
- Unix Full NotesDocument52 pagesUnix Full NotesRahul SinhaPas encore d'évaluation
- An Architectural Overview of QNXDocument16 pagesAn Architectural Overview of QNXreddituserPas encore d'évaluation
- Reactivision 1.5.1: A Toolkit For Tangible Multi-Touch SurfacesDocument7 pagesReactivision 1.5.1: A Toolkit For Tangible Multi-Touch SurfacesRomuald LobetPas encore d'évaluation
- UPOS1.15 - POS For .Net - AppendixC - 10162018Document78 pagesUPOS1.15 - POS For .Net - AppendixC - 10162018elhabib kahlaPas encore d'évaluation
- Introduction to Unix Operating SystemDocument29 pagesIntroduction to Unix Operating SystemjawarishPas encore d'évaluation
- Linux: The World's Most Popular Open-Source Operating SystemDocument7 pagesLinux: The World's Most Popular Open-Source Operating SystemSifat AnwarPas encore d'évaluation
- The UNIX Operating System: TCS ConfidentialDocument220 pagesThe UNIX Operating System: TCS ConfidentialAnonymous iz83EL9Pas encore d'évaluation
- 2 RtosDocument38 pages2 RtosRaghu TejaPas encore d'évaluation
- University of Ulsan IT ServiceDocument42 pagesUniversity of Ulsan IT Servicecind1810Pas encore d'évaluation
- The Unix Time SharingDocument11 pagesThe Unix Time SharingjorgitoSolPas encore d'évaluation
- Report From Embedded Systems Conference: Graham Hardy Brad Hines Phil Irwin Beth Mckenney Martin RegehrDocument13 pagesReport From Embedded Systems Conference: Graham Hardy Brad Hines Phil Irwin Beth Mckenney Martin RegehrSumit Chauhan100% (1)
- CP II Lab Manual For EngineersDocument93 pagesCP II Lab Manual For EngineersVenkatesh ShankarPas encore d'évaluation
- Esd Module 7Document65 pagesEsd Module 7Saikat SahanaPas encore d'évaluation
- From Wikipedia, The Free Encyclopedia: Evolution of Unix and Unix-Like SystemsDocument15 pagesFrom Wikipedia, The Free Encyclopedia: Evolution of Unix and Unix-Like SystemsMacky SainiPas encore d'évaluation
- Unikernels:: The Rise of The Virtual Library Operating SystemDocument9 pagesUnikernels:: The Rise of The Virtual Library Operating SystemScott MitchellPas encore d'évaluation
- Real-Time Driver Model and First ApplicationsDocument8 pagesReal-Time Driver Model and First ApplicationsJhonatan GutierrezPas encore d'évaluation
- Unii III-BCS 3030 FinalDocument66 pagesUnii III-BCS 3030 FinalElijah MwalePas encore d'évaluation
- Unix For Beginners - SLDocument220 pagesUnix For Beginners - SLPavan VasanthamPas encore d'évaluation
- Modelling Electromagnetic Fields Propagated From An AC Electrified Railway Using TLMDocument4 pagesModelling Electromagnetic Fields Propagated From An AC Electrified Railway Using TLMaarthisubPas encore d'évaluation
- Sensors 14 06247Document32 pagesSensors 14 06247VENKIPas encore d'évaluation
- Nodal AnalysisDocument20 pagesNodal AnalysisSaarthak VadheraPas encore d'évaluation
- Zimmer PLL Update 051405Document137 pagesZimmer PLL Update 051405goutambiswaPas encore d'évaluation
- Lshort PDFDocument171 pagesLshort PDFJoe MullerPas encore d'évaluation
- Data Encryption Routines For Pic24 and Dspic Devices: BackgroundDocument18 pagesData Encryption Routines For Pic24 and Dspic Devices: BackgroundgoutambiswaPas encore d'évaluation
- LATEX Tutorial PDFDocument37 pagesLATEX Tutorial PDFMuhammad AliPas encore d'évaluation
- Software Quality Assurance Plan1818Document14 pagesSoftware Quality Assurance Plan1818Angel LadPas encore d'évaluation
- Optimum 32bit CRC For Internet KOOPMANDocument10 pagesOptimum 32bit CRC For Internet KOOPMANgoutambiswaPas encore d'évaluation
- Parallel CRC RealizationDocument20 pagesParallel CRC RealizationgoutambiswaPas encore d'évaluation
- Blitzsch enDocument36 pagesBlitzsch enNeranjan LihinikumaraPas encore d'évaluation
- Cortex-M3 Reference ManualDocument410 pagesCortex-M3 Reference ManualAgabier12Pas encore d'évaluation
- Concurrencia PDFDocument160 pagesConcurrencia PDFreoguanPas encore d'évaluation
- Data Science PresentationDocument20 pagesData Science Presentationyadvendra dhakadPas encore d'évaluation
- cs4410 Prelim1 Soln PDFDocument4 pagescs4410 Prelim1 Soln PDFSherin OmranPas encore d'évaluation
- OS QuizDocument1 pageOS QuizJordan PerezPas encore d'évaluation
- Hreads: Program Counter: RegistersDocument21 pagesHreads: Program Counter: RegistersRao AtifPas encore d'évaluation
- CP 226 Cpu Scheduling AssignmentDocument6 pagesCP 226 Cpu Scheduling Assignmentwell responsivePas encore d'évaluation
- Tutorial 2 QuestionsDocument4 pagesTutorial 2 QuestionsDOUMBOUYA SIDIKIPas encore d'évaluation
- Concurrent Control Using 2-Phase LockingDocument50 pagesConcurrent Control Using 2-Phase LockingPrasanth ReddyPas encore d'évaluation
- Log 2023 03 07hwhwhwhwhDocument2 pagesLog 2023 03 07hwhwhwhwhFahmialmazaniPas encore d'évaluation
- 04 CPU SchedulingDocument34 pages04 CPU SchedulingTung Vũ DuyPas encore d'évaluation
- (123doc) Dien Tu Vien Thong c16 Instructionlevel Parallelism and Superscalar Processors 39 g3 KhotailieuDocument71 pages(123doc) Dien Tu Vien Thong c16 Instructionlevel Parallelism and Superscalar Processors 39 g3 KhotailieuNguyễn Hoàng HảiPas encore d'évaluation
- Performance Enhancement of CPU Scheduling by Hybrid Algorithms Using Genetic ApproachDocument3 pagesPerformance Enhancement of CPU Scheduling by Hybrid Algorithms Using Genetic ApproachIjarcet Journal100% (1)
- Drop BoxDocument54 pagesDrop Box05032000ePas encore d'évaluation
- MAP UNIT 4 MCQDocument6 pagesMAP UNIT 4 MCQGEO MERIN100% (1)
- 03 - Lecture #3Document32 pages03 - Lecture #3Fatma mansourPas encore d'évaluation
- MTE 241 Final ReviewDocument19 pagesMTE 241 Final Reviewblu_berriePas encore d'évaluation
- Using Thread ApplicationDocument4 pagesUsing Thread ApplicationMarthinPas encore d'évaluation
- Cs-205 Os Nceac Spr-19Document6 pagesCs-205 Os Nceac Spr-19i201757 Khawaja Razzi Ul IslamPas encore d'évaluation
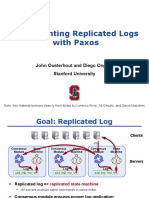
- Implementing Replicated Logs With Paxos: John Ousterhout and Diego Ongaro Stanford UniversityDocument33 pagesImplementing Replicated Logs With Paxos: John Ousterhout and Diego Ongaro Stanford UniversityNarasimha Murthy GangaiahPas encore d'évaluation
- Lab Assignment 5 PDFDocument36 pagesLab Assignment 5 PDFAnkit SrivastavaPas encore d'évaluation
- Power Off Reset ReasonDocument2 pagesPower Off Reset ReasonJose EspinozaPas encore d'évaluation
- PRACTICAL LIST For CS325 (2012-13) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17Document38 pagesPRACTICAL LIST For CS325 (2012-13) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17Sourav KumarPas encore d'évaluation
- 5 Process SynchronizaionDocument58 pages5 Process SynchronizaionLokesh SainiPas encore d'évaluation
- Creating Threads and Parallelizing QuicksortDocument24 pagesCreating Threads and Parallelizing QuicksortSimo BounaPas encore d'évaluation
- Unit-6: Pipeline & Vector ProcessingDocument41 pagesUnit-6: Pipeline & Vector ProcessingThabo NdashePas encore d'évaluation
- Operating System (Lab) : Project Report: ThreadsDocument19 pagesOperating System (Lab) : Project Report: ThreadsMashal Ud DinPas encore d'évaluation
- Power Off Reset Reason BackupDocument5 pagesPower Off Reset Reason BackupYosvin SantizoPas encore d'évaluation
- ACA Answer KeyDocument24 pagesACA Answer KeyNeeraj SinghPas encore d'évaluation