Vous aimerez peut-être aussi
- The Hacker Playbook 1 - Practical Guide To Penetration TestingDocument308 pagesThe Hacker Playbook 1 - Practical Guide To Penetration TestingRafid A. Jassem Alashor83% (6)
- Python Cheat SheetDocument14 pagesPython Cheat Sheetgr8ganesh4495100% (2)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- The Self-Taught Programmer The Definitive Guide To Programming ProfessionallyDocument278 pagesThe Self-Taught Programmer The Definitive Guide To Programming Professionallyjack Reacher100% (58)
- Master'S Degrees: OutlineDocument6 pagesMaster'S Degrees: OutlineJavier AlejandroPas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- FceappDocument1 pageFceappJavier AlejandroPas encore d'évaluation
- Mobile Computing Systems: Master of ScienceDocument2 pagesMobile Computing Systems: Master of ScienceJavier AlejandroPas encore d'évaluation
- Hacking - Beginner To Expert Guide To Computer Hacking, Basic Security, and Penetration Testing (Computer Science Series) (PDFDrive)Document93 pagesHacking - Beginner To Expert Guide To Computer Hacking, Basic Security, and Penetration Testing (Computer Science Series) (PDFDrive)Javier Alejandro100% (2)
- MSc2020 Eurecom InternetOfThings 01 PDFDocument2 pagesMSc2020 Eurecom InternetOfThings 01 PDFasureshitPas encore d'évaluation
- Digital Security: Master of ScienceDocument2 pagesDigital Security: Master of ScienceJavier AlejandroPas encore d'évaluation
- Trysql SlidesDocument152 pagesTrysql SlidesJavier AlejandroPas encore d'évaluation
- Communications and Multimedia Engineering: Information Area of Studies University & LocationDocument2 pagesCommunications and Multimedia Engineering: Information Area of Studies University & LocationJavier AlejandroPas encore d'évaluation
- Master Degree Programmes Information SheetDocument6 pagesMaster Degree Programmes Information SheetHamza SaeedPas encore d'évaluation
- The Missing Link An Introduction To Web Development and Programming PDFDocument304 pagesThe Missing Link An Introduction To Web Development and Programming PDFSakisaki90100% (1)
- Notice of Opening N.º 361 - A/Ga/Gai: Faculty of Sciences and TechnologyDocument4 pagesNotice of Opening N.º 361 - A/Ga/Gai: Faculty of Sciences and TechnologyJavier AlejandroPas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 10 Steps To Earning Awesome GradesDocument88 pages10 Steps To Earning Awesome GradesKamal100% (7)
- Lapukhov Move Fast UnbreakDocument46 pagesLapukhov Move Fast UnbreakJavier AlejandroPas encore d'évaluation
- 200-301 Exam TopicsDocument3 pages200-301 Exam TopicsAqsa NisarPas encore d'évaluation
- Human Haptics ExperimentDocument1 pageHuman Haptics ExperimentJavier AlejandroPas encore d'évaluation
- Studf English 2016Document24 pagesStudf English 2016Dino AlajbegovicPas encore d'évaluation
- The Beamer Class: User Guide For Version 3.41Document248 pagesThe Beamer Class: User Guide For Version 3.41BAHJARI AMINEPas encore d'évaluation
- Procesos Estocásticos PDFDocument131 pagesProcesos Estocásticos PDFJavier AlejandroPas encore d'évaluation
- Understanding Machine Learning Theory AlgorithmsDocument449 pagesUnderstanding Machine Learning Theory AlgorithmsHigor EduardoPas encore d'évaluation
- Libro Introduccion A La Cibernetica Ashby PDFDocument156 pagesLibro Introduccion A La Cibernetica Ashby PDFJorge Vladimir Pachas HuaytánPas encore d'évaluation
- Manual Atmega 164pDocument377 pagesManual Atmega 164pJavier AlejandroPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Lab 1 Information Hiding: Before You StartDocument8 pagesLab 1 Information Hiding: Before You StartManav BatraPas encore d'évaluation
- Complete C++ Practical FileDocument26 pagesComplete C++ Practical Filekasanaarpit200506Pas encore d'évaluation
- Kubernetes 1Document3 pagesKubernetes 1AymenPas encore d'évaluation
- Global System For Mobile CommunicationDocument7 pagesGlobal System For Mobile CommunicationDeepak100% (1)
- Core Problems: Testing Web Applications For VulnerabilitiesDocument13 pagesCore Problems: Testing Web Applications For VulnerabilitiesAnonymous X8w05bOLPas encore d'évaluation
- SHARING HUAWEI NE800-M SeriesDocument55 pagesSHARING HUAWEI NE800-M SeriesFaisal ArfanPas encore d'évaluation
- MicroLogix 1100 Programmable Controllers Instruction Set ReferenceDocument618 pagesMicroLogix 1100 Programmable Controllers Instruction Set ReferenceJonathan OcampoPas encore d'évaluation
- 2010-11 Hawell 7000seriesDVRmanual SVR 7504Document72 pages2010-11 Hawell 7000seriesDVRmanual SVR 7504BBFulPas encore d'évaluation
- TSV3561 Lesson Plan For StudentDocument9 pagesTSV3561 Lesson Plan For StudentShenWeiPas encore d'évaluation
- FT232RLDocument43 pagesFT232RLRbt DmsPas encore d'évaluation
- TV Vestel Universum Sanyo Seg 17mb11 26''Document64 pagesTV Vestel Universum Sanyo Seg 17mb11 26''videosonPas encore d'évaluation
- Rahul PandeyDocument10 pagesRahul PandeybarunluckyPas encore d'évaluation
- Esquare Info Solution Presentation 2023Document13 pagesEsquare Info Solution Presentation 2023ahamedsahibPas encore d'évaluation
- SCD5200 CPU OptoNet Power Supply Ethernet (COPE) ModuleDocument8 pagesSCD5200 CPU OptoNet Power Supply Ethernet (COPE) ModuleWisnu HartonoPas encore d'évaluation
- Workstation Heat, Power Usage, and Sound: Lenovo ThinkStation C30 vs. HP Z620 WorkstationDocument14 pagesWorkstation Heat, Power Usage, and Sound: Lenovo ThinkStation C30 vs. HP Z620 WorkstationPrincipled TechnologiesPas encore d'évaluation
- HiDocument6 pagesHiCole ZubacPas encore d'évaluation
- Content PDFDocument3 pagesContent PDFrafita muñozPas encore d'évaluation
- Data Communications: Lecture - 1Document25 pagesData Communications: Lecture - 1Fr SunnyPas encore d'évaluation
- Simatic Industrial Software SIMATIC S7 F Systems Engineering V6.4Document14 pagesSimatic Industrial Software SIMATIC S7 F Systems Engineering V6.4Felipe ZapataPas encore d'évaluation
- DSS 7016 Manager User's Manual 201311Document48 pagesDSS 7016 Manager User's Manual 201311Jose Luis Pardo FigueroaPas encore d'évaluation
- HTML - FramesDocument14 pagesHTML - FramesDanita Ureta BalastaPas encore d'évaluation
- Pre-Requiste Proforma To Start BS-4 Year Programme (Bsfyp)Document5 pagesPre-Requiste Proforma To Start BS-4 Year Programme (Bsfyp)irfanPas encore d'évaluation
- Operating Systems (For IT Students) Lecture 8 Test Bank Multiple Choice QuestionsDocument6 pagesOperating Systems (For IT Students) Lecture 8 Test Bank Multiple Choice QuestionssamiPas encore d'évaluation
- Digital Marketing Services Brochure - 230819 - 110029Document22 pagesDigital Marketing Services Brochure - 230819 - 110029Parminder SinghPas encore d'évaluation
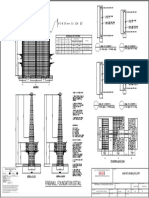
- Ar-En-005-0001-04 - Firewall Plan and DetailsDocument1 pageAr-En-005-0001-04 - Firewall Plan and DetailsAmol ChavanPas encore d'évaluation
- Midterm ReviewDocument2 pagesMidterm ReviewJonathan ChiuPas encore d'évaluation
- Valeport miniSVPDocument1 pageValeport miniSVPHafiz AsyrafPas encore d'évaluation
- Ahmad Nafir Bin Ahmad Sukeri-2Document4 pagesAhmad Nafir Bin Ahmad Sukeri-2Ahmad NaferPas encore d'évaluation
- Assignment-6: TheoryDocument4 pagesAssignment-6: TheoryYash ChindhePas encore d'évaluation
- Flash Tutorial Falling StarsDocument12 pagesFlash Tutorial Falling Starspayeh89Pas encore d'évaluation