Vous aimerez peut-être aussi
- Ferri - Implementación de Algoritmos de Control Avanzados MPC en PLCs IndustrialesDocument81 pagesFerri - Implementación de Algoritmos de Control Avanzados MPC en PLCs IndustrialesJorge Antonio Ramírez MedinaPas encore d'évaluation
- Practica 4 ServomecanismosDocument47 pagesPractica 4 ServomecanismosJorge PozosPas encore d'évaluation
- Analisis Desepeño Control Aplicadas A Turbina EólicasDocument26 pagesAnalisis Desepeño Control Aplicadas A Turbina EólicasMartín Tusco GarcíaPas encore d'évaluation
- Sistemas de Control de Generadores Sincrónicos e Implementaciones en El EMTPATPDrawDocument101 pagesSistemas de Control de Generadores Sincrónicos e Implementaciones en El EMTPATPDrawOscar GutierrezPas encore d'évaluation
- Control de Altitud de Un Motor Brushless Mediante El Uso de Un Sensor HCDocument15 pagesControl de Altitud de Un Motor Brushless Mediante El Uso de Un Sensor HCNabilExgenPas encore d'évaluation
- Control de Posicionamiento de Un Motor DC en Una Aplicación de Seguimiento de Un ObjetoDocument11 pagesControl de Posicionamiento de Un Motor DC en Una Aplicación de Seguimiento de Un Objeto0ZKRCITHOPas encore d'évaluation
- P3 - Control Clásico de Sistemas Electromecánicos - Root LocusDocument4 pagesP3 - Control Clásico de Sistemas Electromecánicos - Root Locusluz castilloPas encore d'évaluation
- Practica 3. Operacion de Motores SecuanciadosDocument11 pagesPractica 3. Operacion de Motores SecuanciadosFranciscoPas encore d'évaluation
- Diseño de Automatismos en Procesos IndustrialesDocument7 pagesDiseño de Automatismos en Procesos IndustrialesNicolas Joel PerrazoPas encore d'évaluation
- S4 Contenido Concm1301Document19 pagesS4 Contenido Concm1301Maikol Andres Cerda RojasPas encore d'évaluation
- Apuntes de Clase ICA PDFDocument168 pagesApuntes de Clase ICA PDFFrancis Canales GoyzuetaPas encore d'évaluation
- Proyecto FinalDocument20 pagesProyecto FinalDavid GutiérrezPas encore d'évaluation
- DigSilent TurbinaDocument16 pagesDigSilent TurbinaAndres Jacho AlvaradoPas encore d'évaluation
- Diseno e Implementacion de Una Simulacion Con La Incorporacion de Una Operacion Unitaria Cape-OpenDocument101 pagesDiseno e Implementacion de Una Simulacion Con La Incorporacion de Una Operacion Unitaria Cape-OpenSantiago CobaledaPas encore d'évaluation
- Untels: Facultad de Ingeniería Y GestiónDocument7 pagesUntels: Facultad de Ingeniería Y GestiónMax MelgarejoPas encore d'évaluation
- Untels: Facultad de Ingeniería Y GestiónDocument5 pagesUntels: Facultad de Ingeniería Y GestiónMax MelgarejoPas encore d'évaluation
- Reporte Trabajo Final Fabricio Donato y Miguel ChavesDocument9 pagesReporte Trabajo Final Fabricio Donato y Miguel ChavesFabricio DonatoPas encore d'évaluation
- Sistemas de Control Industrial PDFDocument138 pagesSistemas de Control Industrial PDFMiguel NuñezPas encore d'évaluation
- Sabana Jose Velocidad Angular Motor Vehiculo ElectricoDocument48 pagesSabana Jose Velocidad Angular Motor Vehiculo ElectricoSOLIS VITOR EDWIN ANGELPas encore d'évaluation
- Producto Integrador de AprendizajeDocument24 pagesProducto Integrador de AprendizajeLuis Daniel Barraza MartinezPas encore d'évaluation
- P2 Temr433cp 2021aDocument5 pagesP2 Temr433cp 2021aStalin CuyoPas encore d'évaluation
- Manual Simulador Motor Adaptacion Programacion Puesta Punto Hardware Estudio ModeloDocument97 pagesManual Simulador Motor Adaptacion Programacion Puesta Punto Hardware Estudio ModeloJhonny CastilloPas encore d'évaluation
- Controladores Logicos Programables - Unidad 1Document142 pagesControladores Logicos Programables - Unidad 1Victor Felipe Domínguez Malo100% (1)
- PidDocument270 pagesPiddiegoPas encore d'évaluation
- TFG Omar Estalin Alarcon BalsecaDocument62 pagesTFG Omar Estalin Alarcon BalsecaSergio Cayetano PalaciosPas encore d'évaluation
- Proyecto de Control de VelocidadDocument7 pagesProyecto de Control de VelocidadSan TosPas encore d'évaluation
- Control Trabajo Laboratorio Unmsm FieeDocument21 pagesControl Trabajo Laboratorio Unmsm FieeMarchena Segil ErikPas encore d'évaluation
- IPP-Coautor - IPP Preced. Arranque Tens ReDocument11 pagesIPP-Coautor - IPP Preced. Arranque Tens ReFernando L VargasPas encore d'évaluation
- Plan Jeisson-Oscar PrintDocument36 pagesPlan Jeisson-Oscar PrintJeisson Mauricio100% (1)
- I Masser174Document74 pagesI Masser174Fredy Andres Torres NavaPas encore d'évaluation
- Balancín Con Control PIDDocument11 pagesBalancín Con Control PIDMack Gonzalez GarciaPas encore d'évaluation
- Logica Difusa AplicacionesDocument6 pagesLogica Difusa AplicacionesManuel Brambila PelayoPas encore d'évaluation
- Informe PLCDocument14 pagesInforme PLCNacho Castro IzquierdoPas encore d'évaluation
- Untels: Facultad de Ingeniería Y GestiónDocument6 pagesUntels: Facultad de Ingeniería Y GestiónMax MelgarejoPas encore d'évaluation
- Descripción de Un Cargador FrontalDocument6 pagesDescripción de Un Cargador FrontalalbertoPas encore d'évaluation
- Anteproyecto de ControlDocument6 pagesAnteproyecto de ControlEmanuel Arcos CoronelPas encore d'évaluation
- 280575772-Thesis-Design-and-Implementation-of-a-Three-Phase-Induction-Motor-Control-Scheme (1) .En - EsDocument135 pages280575772-Thesis-Design-and-Implementation-of-a-Three-Phase-Induction-Motor-Control-Scheme (1) .En - EsCHRISTIANPas encore d'évaluation
- Proyecto Uav 22Document12 pagesProyecto Uav 22VICENTE MARÍNPas encore d'évaluation
- Tesis Proceso 2006Document60 pagesTesis Proceso 2006labmultipropositoPas encore d'évaluation
- Guia 6 - Laboratorio de Fisher - NeumaticaDocument13 pagesGuia 6 - Laboratorio de Fisher - NeumaticaDaniel ZaratePas encore d'évaluation
- Perdidas - Rendimientos y Factor Servicio en Transmisiones Mecanicas v12.08Document14 pagesPerdidas - Rendimientos y Factor Servicio en Transmisiones Mecanicas v12.08lucasf2606Pas encore d'évaluation
- Control PID y FUZZY de Una Planta de LuzDocument10 pagesControl PID y FUZZY de Una Planta de LuzAndres SalasPas encore d'évaluation
- S4 Contenido Concm1301Document19 pagesS4 Contenido Concm1301mauricio mamaniPas encore d'évaluation
- Festo 1Document98 pagesFesto 1Moi37Pas encore d'évaluation
- TFG I 1221Document72 pagesTFG I 1221chiflaisabelPas encore d'évaluation
- Taz TFM 2013 1152Document49 pagesTaz TFM 2013 1152REYES APOLONIO CASTRO CORRALPas encore d'évaluation
- Diseño de Un Controlador de Velocidad para Un MotorDocument18 pagesDiseño de Un Controlador de Velocidad para Un MotorEduardo Vargas ArancibiaPas encore d'évaluation
- Manual de Practicas Paneles Aut Electricos SCHNEIDER - ContactoresDocument169 pagesManual de Practicas Paneles Aut Electricos SCHNEIDER - ContactoresLeandrx TorresPas encore d'évaluation
- Clase 3Document17 pagesClase 3Marvin MonzónPas encore d'évaluation
- Electronica Digital AplicadaDocument190 pagesElectronica Digital Aplicadaalfredo marot100% (5)
- MemòriaDocument158 pagesMemòriaEsteban Rojas CajaleonPas encore d'évaluation
- Torno 1M-61Document20 pagesTorno 1M-61Armando Enrique WassmerPas encore d'évaluation
- MetodologíaDocument7 pagesMetodologíaMIGUEL ANGEL AMBRIZHERNANDEZPas encore d'évaluation
- Modelado unidimensional de los motores de dos tiempos de pequeña cilindradaD'EverandModelado unidimensional de los motores de dos tiempos de pequeña cilindradaÉvaluation : 5 sur 5 étoiles5/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónD'EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónÉvaluation : 5 sur 5 étoiles5/5 (1)
- Recirculación de gases de escape mediante sistemas de baja presión en motores diésel sobrealimentadosD'EverandRecirculación de gases de escape mediante sistemas de baja presión en motores diésel sobrealimentadosÉvaluation : 3 sur 5 étoiles3/5 (3)
- Modelado tridimensional del flujo de aire en el cilindro de motores diésel de inyección directaD'EverandModelado tridimensional del flujo de aire en el cilindro de motores diésel de inyección directaPas encore d'évaluation
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaD'EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaPas encore d'évaluation
- Reparación de instalaciones automatizadas. ELEE0109D'EverandReparación de instalaciones automatizadas. ELEE0109Pas encore d'évaluation
- Iniciativa Del Sport de RecifeDocument2 pagesIniciativa Del Sport de RecifejlzmotricoPas encore d'évaluation
- 2016 08 04 Nota InformativaDocument2 pages2016 08 04 Nota InformativaAlbino AlonsoPas encore d'évaluation
- Verbtab SP PDFDocument4 pagesVerbtab SP PDFjlzmotricoPas encore d'évaluation
- Examen15 09 2011Document4 pagesExamen15 09 2011jlzmotricoPas encore d'évaluation
- Dialnet PanoramaPreliminarParaLaConstruccionDeUnaPlantaDeE 5113290Document11 pagesDialnet PanoramaPreliminarParaLaConstruccionDeUnaPlantaDeE 5113290jlzmotricoPas encore d'évaluation
- Ejemplo PatenteDocument8 pagesEjemplo PatenteTania MendezPas encore d'évaluation
- Verbos JaponesesDocument6 pagesVerbos JaponesesjlzmotricoPas encore d'évaluation
- Tema 7 Quim Amb 1Document15 pagesTema 7 Quim Amb 1jlzmotricoPas encore d'évaluation
- Análisis de La Industria Del Videojuego en EspañaDocument261 pagesAnálisis de La Industria Del Videojuego en EspañajlzmotricoPas encore d'évaluation
- Programacion Web MovilDocument197 pagesProgramacion Web MovilCristian Alberto OlivaPas encore d'évaluation
- Análisis de La Industria Del Videojuego en EspañaDocument261 pagesAnálisis de La Industria Del Videojuego en EspañajlzmotricoPas encore d'évaluation
- Ciclo MineroDocument3 pagesCiclo MineroDaniela Andrea Figueroa VargasPas encore d'évaluation
- UNITY Diseño y Programación de Videojuegos - USERSDocument322 pagesUNITY Diseño y Programación de Videojuegos - USERSYasmina AcuñaPas encore d'évaluation
- CalendarioDocument1 pageCalendariojlzmotricoPas encore d'évaluation
- FV EjemploDocument8 pagesFV EjemplojlzmotricoPas encore d'évaluation
- Iniciativa Del Sport de RecifeDocument2 pagesIniciativa Del Sport de RecifejlzmotricoPas encore d'évaluation
- Aprendizaje CooperativoDocument1 pageAprendizaje CooperativojlzmotricoPas encore d'évaluation
- Atlas de Radiacion 24042012 PDFDocument162 pagesAtlas de Radiacion 24042012 PDFjlzmotricoPas encore d'évaluation
- PractikaDocument3 pagesPractikajlzmotricoPas encore d'évaluation
- Tema 7 Quim Amb 1Document15 pagesTema 7 Quim Amb 1jlzmotricoPas encore d'évaluation
- Dinamica Vertical-Tipos de SuspencionDocument52 pagesDinamica Vertical-Tipos de SuspencionjlzmotricoPas encore d'évaluation
- Tema 1Document14 pagesTema 1jlzmotricoPas encore d'évaluation
- Guia de La Energia Geotermica (Dtor Gral Minas CAM)Document178 pagesGuia de La Energia Geotermica (Dtor Gral Minas CAM)ADGARCIAGARCIA100% (1)
- 1 Factores AfectivosDocument37 pages1 Factores AfectivosjlzmotricoPas encore d'évaluation
- Dinamica Lateral TransitorioDocument13 pagesDinamica Lateral TransitoriojlzmotricoPas encore d'évaluation
- Ciclo MineroDocument3 pagesCiclo MineroDaniela Andrea Figueroa VargasPas encore d'évaluation
- Dialnet PanoramaPreliminarParaLaConstruccionDeUnaPlantaDeE 5113290Document11 pagesDialnet PanoramaPreliminarParaLaConstruccionDeUnaPlantaDeE 5113290jlzmotricoPas encore d'évaluation
- 1 Dinámica de GruposDocument1 page1 Dinámica de GruposjlzmotricoPas encore d'évaluation
- Vivienda Unifamiliar La MonetDocument17 pagesVivienda Unifamiliar La MonetEsteban SalgueroPas encore d'évaluation
- Indar SG G Fy03inme00 B PDFDocument2 pagesIndar SG G Fy03inme00 B PDFNayla Chuquimia MamaniPas encore d'évaluation
- Yw125x-2du4 2015Document56 pagesYw125x-2du4 2015Deymer patiñoPas encore d'évaluation
- Proteccion de Sistemas Electricos de PotenciaDocument8 pagesProteccion de Sistemas Electricos de PotenciaAlex Albino ChuctayaPas encore d'évaluation
- Reles de Sobrecarga Termico CatalgoDocument2 pagesReles de Sobrecarga Termico CatalgoJuuaanchoo CnnzPas encore d'évaluation
- Apu CumacaDocument42 pagesApu CumacaDiego Alvarez GarzónPas encore d'évaluation
- Guardamotores, Contactores y Reles Termicos Hasta 11 KWDocument28 pagesGuardamotores, Contactores y Reles Termicos Hasta 11 KWLeonardoPas encore d'évaluation
- DocumentoDocument2 pagesDocumentolalalelelolo2010Pas encore d'évaluation
- TV Emerson ETV-1501PF No Hay EncendidoDocument2 pagesTV Emerson ETV-1501PF No Hay EncendidoCarlos Ramirez100% (1)
- Pet - 01 Traslado de Personal, Equipos, Herramientas y Materiales - Bases MovilesDocument3 pagesPet - 01 Traslado de Personal, Equipos, Herramientas y Materiales - Bases MovilesPao Pkdos100% (1)
- Bombeo Mecanico PDFDocument48 pagesBombeo Mecanico PDFFernandoEnriqueCalveteGonzálezPas encore d'évaluation
- Ejemplos TemperaturaDocument4 pagesEjemplos TemperaturawillygansPas encore d'évaluation
- Ley de Farad e InductoresDocument2 pagesLey de Farad e InductoresCristhian SeguraPas encore d'évaluation
- Detector de Metales Con 555Document21 pagesDetector de Metales Con 555Juan Navarrete GuzmanPas encore d'évaluation
- Indicadores Series 2000 y 3000 Manual de Instrucciones: Indicador T23PDocument40 pagesIndicadores Series 2000 y 3000 Manual de Instrucciones: Indicador T23PAldair MezaPas encore d'évaluation
- Equipos y Componentes Industriales 30 de Noviembre 2020 Casi HechoDocument4 pagesEquipos y Componentes Industriales 30 de Noviembre 2020 Casi HechoJorge Alberto De La Cruz LopezPas encore d'évaluation
- Manual de Unidades Constructivas Sistema 24.9kvDocument78 pagesManual de Unidades Constructivas Sistema 24.9kvDaniel CanaviriPas encore d'évaluation
- Expediente Tecnico Instalación de GN IndustrialDocument3 pagesExpediente Tecnico Instalación de GN IndustrialMiguel NarroPas encore d'évaluation
- Ciemi Medios Desconexion PDFDocument57 pagesCiemi Medios Desconexion PDFJayson Teo100% (1)
- Machine Doll Wa Kizutsukanai Volumen 02 PDFDocument289 pagesMachine Doll Wa Kizutsukanai Volumen 02 PDFjuanmjunco83Pas encore d'évaluation
- 4-Curso CIER - Módulo 4 20140819 Pagina CompletaDocument63 pages4-Curso CIER - Módulo 4 20140819 Pagina CompletaDaniel EchegoyenPas encore d'évaluation
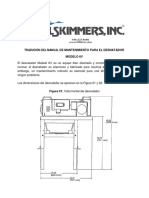
- Desnatador OilskimmersDocument5 pagesDesnatador OilskimmersGilver ApazaPas encore d'évaluation
- Arranque DirectoDocument3 pagesArranque DirectoMarcos SchlegelPas encore d'évaluation
- Sist. de Admisión y Escape Diagnosticvo de Motores DieselDocument15 pagesSist. de Admisión y Escape Diagnosticvo de Motores DieselLhinCe RojinegroPas encore d'évaluation
- Bandejas CorporDocument20 pagesBandejas CorporRicardo RomeroPas encore d'évaluation
- Plantas de PotenciaDocument3 pagesPlantas de PotenciaAdonis EnriquePas encore d'évaluation
- Lubricante Penetrante Ab-80 PDFDocument1 pageLubricante Penetrante Ab-80 PDFDaniela Victoria Rivera PardoPas encore d'évaluation
- Conceptos Fundamentales de Subestaciones EléctricasDocument57 pagesConceptos Fundamentales de Subestaciones EléctricasAngel De Jesus Olvera Barrera100% (1)
- Kit Autoconsumo 2000W Inyeccion Cero - DSP SolarDocument4 pagesKit Autoconsumo 2000W Inyeccion Cero - DSP SolarDavid NietoPas encore d'évaluation
- ENERGÍA RENOVABLE Carolina Taco CalsinaDocument2 pagesENERGÍA RENOVABLE Carolina Taco CalsinaCarolina Yuliana Taco CalsinaPas encore d'évaluation