Vous aimerez peut-être aussi
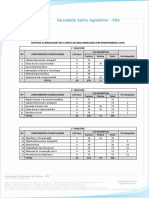
- Matriz Curricular Do Curso de Arquitetura E UrbanismoDocument3 pagesMatriz Curricular Do Curso de Arquitetura E UrbanismoRodrigo FilhoPas encore d'évaluation
- WWWWDocument2 pagesWWWWRodrigo FilhoPas encore d'évaluation
- GradeDocument2 pagesGradeJcesarfn CesarPas encore d'évaluation
- Matriz Curricular Do Curso de Bacharelado em Engenharia CivilDocument4 pagesMatriz Curricular Do Curso de Bacharelado em Engenharia CivilRodrigo FilhoPas encore d'évaluation
- Matriz Curricular Do Curso de Bacharelado em Engenharia CivilDocument4 pagesMatriz Curricular Do Curso de Bacharelado em Engenharia CivilRodrigo FilhoPas encore d'évaluation
- Matriz Curricular de Engenharia CivilDocument7 pagesMatriz Curricular de Engenharia CivilRodrigo FilhoPas encore d'évaluation
- Etwt We Tewt Erg PDFDocument6 pagesEtwt We Tewt Erg PDFRodrigo FilhoPas encore d'évaluation
- Matriz EngenhariaDocument4 pagesMatriz EngenhariaMikhael FerreiraPas encore d'évaluation
- 2013 JoelPinheiroDaFonsecaDocument148 pages2013 JoelPinheiroDaFonsecarodrigosa1832Pas encore d'évaluation
- Estágio Não ObrigatórioDocument52 pagesEstágio Não ObrigatórioRodrigo FilhoPas encore d'évaluation
- E Book Francês Rápido para IniciantesDocument37 pagesE Book Francês Rápido para IniciantesAron Mariano de OliveiraPas encore d'évaluation
- AsfasfasdasfafascDocument1 pageAsfasfasdasfafascRodrigo FilhoPas encore d'évaluation
- Modelo Slide Apresentacao TCCDocument14 pagesModelo Slide Apresentacao TCCRodrigo Filho100% (3)
- Modelo de Elaboração Do Artigo Científico: Normas e Formato de Trabalho de Conclusão de CursoDocument4 pagesModelo de Elaboração Do Artigo Científico: Normas e Formato de Trabalho de Conclusão de CursoRodrigo FilhoPas encore d'évaluation
- 2012 LauraResendeTavaresDocument192 pages2012 LauraResendeTavaresRodrigo FilhoPas encore d'évaluation
- Eng Engenha Florestal Conheci EspeciDocument7 pagesEng Engenha Florestal Conheci EspeciRodrigo FilhoPas encore d'évaluation
- Memória de Cálculo Da Vazão Do Sistema de Pressurização de EscadaDocument5 pagesMemória de Cálculo Da Vazão Do Sistema de Pressurização de EscadaMoisés Ribeiro Neto50% (2)
- Modelo de Elaboração Do Artigo Científico: Normas e Formato de Trabalho de Conclusão de CursoDocument4 pagesModelo de Elaboração Do Artigo Científico: Normas e Formato de Trabalho de Conclusão de CursoRodrigo FilhoPas encore d'évaluation
- Gestão de SegurançaDocument70 pagesGestão de SegurançaLuiz Rubens Souza Cantelli100% (1)
- BIM Aplicado A Simulação Acustica PDFDocument9 pagesBIM Aplicado A Simulação Acustica PDFDiego CoimbraPas encore d'évaluation
- Lean Office Aplicado em Um Escritório de Engenharia: ResumoDocument11 pagesLean Office Aplicado em Um Escritório de Engenharia: ResumoRodrigo FilhoPas encore d'évaluation
- A Floresta e o Solo!!!Document33 pagesA Floresta e o Solo!!!cjfranz86% (7)
- Vocabulario Frances Portugues Cozinhar AlimentosDocument23 pagesVocabulario Frances Portugues Cozinhar AlimentosCrenti MiichellPas encore d'évaluation
- Pressurizaçao Escada de Incendio-Painel Eletrico Folha01Document1 pagePressurizaçao Escada de Incendio-Painel Eletrico Folha01Rodrigo FilhoPas encore d'évaluation
- Bruno Boc Chip P Gem Original 2016Document131 pagesBruno Boc Chip P Gem Original 2016Rodrigo FilhoPas encore d'évaluation
- E Book Francês Rápido para IniciantesDocument37 pagesE Book Francês Rápido para IniciantesAron Mariano de OliveiraPas encore d'évaluation
- Memória de Cálculo Da Vazão Do Sistema de Pressurização de EscadaDocument5 pagesMemória de Cálculo Da Vazão Do Sistema de Pressurização de EscadaMoisés Ribeiro Neto50% (2)
- Documentos - Modelo Do Relatório Final Do TICT MECANICA Com InstruçõesDocument30 pagesDocumentos - Modelo Do Relatório Final Do TICT MECANICA Com InstruçõesRodrigo FilhoPas encore d'évaluation
- Pressurização de Escada e Exaustão Mecânica (00) - Fev 2006Document44 pagesPressurização de Escada e Exaustão Mecânica (00) - Fev 2006Daniel Melice100% (1)
- Fepese 2010 Imetro SC Engenheiro Eletrico GabaritoDocument1 pageFepese 2010 Imetro SC Engenheiro Eletrico GabaritoRodrigo FilhoPas encore d'évaluation
- Catalogo de Produtos OmronDocument59 pagesCatalogo de Produtos Omrongerrosil00Pas encore d'évaluation
- Slide 01Document17 pagesSlide 01Hernane BiniPas encore d'évaluation
- MN 012463 R03 DS-440X4 SiteDocument14 pagesMN 012463 R03 DS-440X4 SiteMarcelo Hiroshi AraiPas encore d'évaluation
- Contrato Num 211634Document34 pagesContrato Num 211634Hilton FlavioPas encore d'évaluation
- Edital Polícia Legislativa 2014Document2 pagesEdital Polícia Legislativa 2014Rafael LeitePas encore d'évaluation
- 01 - Leia! - Instalação Passo A PassoDocument21 pages01 - Leia! - Instalação Passo A PassogrcboltPas encore d'évaluation
- Procedimento de Instalação KaraokeDocument2 pagesProcedimento de Instalação KaraokeJoão Carlos F. LimaPas encore d'évaluation
- Aula - Prova Documental - Prof. Camila Spmarques 2017 - Aula 7Document30 pagesAula - Prova Documental - Prof. Camila Spmarques 2017 - Aula 7Direito Fac 42100% (2)
- ManualDocument53 pagesManualPatricia VianaPas encore d'évaluation
- LPI Pratica 1Document26 pagesLPI Pratica 1Wagner SouzaPas encore d'évaluation
- Resumo Do Livro Comando P QDocument2 pagesResumo Do Livro Comando P QKom Wu100% (3)
- (Manual) Frequencia Escolar (Projeto Presença)Document84 pages(Manual) Frequencia Escolar (Projeto Presença)AndyChronoPas encore d'évaluation
- Criptografia e SegurançaDocument193 pagesCriptografia e SegurançaThiago Laurindo 2Pas encore d'évaluation
- Informatica - História e Evolução Dos ComputadoresDocument21 pagesInformatica - História e Evolução Dos Computadoresanon_799382366Pas encore d'évaluation
- An43 1Document28 pagesAn43 1Wagner MirandaPas encore d'évaluation
- Pert CPM PDFDocument20 pagesPert CPM PDFThayane SoaresPas encore d'évaluation
- Dissertação AtividadeDocument4 pagesDissertação AtividadePaulo OliveiraPas encore d'évaluation
- Tabela TOUCH CELL - 2022-09-30T083316.985Document11 pagesTabela TOUCH CELL - 2022-09-30T083316.985Ismael MonteiroPas encore d'évaluation
- A Empresa MicrolinsDocument7 pagesA Empresa MicrolinsBjlapanews Portal de NoticiasPas encore d'évaluation
- Análise Combinatória, Probabilidade Noções de Estatística 1Document44 pagesAnálise Combinatória, Probabilidade Noções de Estatística 1ProprietárioPas encore d'évaluation
- Exercicios Aula 2Document2 pagesExercicios Aula 2Leonardo MenegonPas encore d'évaluation
- Big Data Hadoop - Facilitando A Construção de AplicaçõesDocument17 pagesBig Data Hadoop - Facilitando A Construção de AplicaçõesAnderson KerllyPas encore d'évaluation
- Manual Usuario Positivo Ypy7 Ypy10Document52 pagesManual Usuario Positivo Ypy7 Ypy10Bruno LufierPas encore d'évaluation
- Cancelamentos de DisciplinasDocument16 pagesCancelamentos de DisciplinasLucas Felippini RossettiPas encore d'évaluation
- IT 001 - Plano Da QualidadeDocument6 pagesIT 001 - Plano Da Qualidadewagqualidade100% (2)
- Agrofenix Emplementos Ltda 1: Chico de Paula 085-203 Av Nossa Senhora de Fatima, 179Document1 pageAgrofenix Emplementos Ltda 1: Chico de Paula 085-203 Av Nossa Senhora de Fatima, 179andre regis conegeroPas encore d'évaluation
- O Trabalho e A ErgonomiaDocument17 pagesO Trabalho e A ErgonomiaMuvane CanzerPas encore d'évaluation
- 191218-MG3000 Manual R00Document98 pages191218-MG3000 Manual R00escabamPas encore d'évaluation
- Trabalho RCM MTFB MTTR - Claiton GustavoDocument9 pagesTrabalho RCM MTFB MTTR - Claiton GustavoCarolina OliveiraPas encore d'évaluation