Vous aimerez peut-être aussi
- Simple Physical Models For Foundation DynamicsDocument43 pagesSimple Physical Models For Foundation DynamicsJORGRULESPas encore d'évaluation
- Machine - Foundation - Vibrations-Vertical Dynamic Response of Foundation RestingDocument7 pagesMachine - Foundation - Vibrations-Vertical Dynamic Response of Foundation RestingRajendra S. RautPas encore d'évaluation
- Machine Foundation Vibrations PDFDocument7 pagesMachine Foundation Vibrations PDFdce_40Pas encore d'évaluation
- Upper-Bound Solution For Seismic Bearing Capacity of Shallow Foundations Near A SlopeDocument6 pagesUpper-Bound Solution For Seismic Bearing Capacity of Shallow Foundations Near A SlopeHUGIPas encore d'évaluation
- An Analytical Method For Designing Laterally Loaded PilesDocument8 pagesAn Analytical Method For Designing Laterally Loaded PilesrodrigoPas encore d'évaluation
- 1991-Eesd - Dynamic Pile-Soil-Pile Interaction. Part 1 PDFDocument18 pages1991-Eesd - Dynamic Pile-Soil-Pile Interaction. Part 1 PDFrolohePas encore d'évaluation
- Dynamic Pile-Soil-Pile Interaction. Part I: Analysis of Axial VibrationDocument18 pagesDynamic Pile-Soil-Pile Interaction. Part I: Analysis of Axial VibrationAlex E. MoralesPas encore d'évaluation
- Dynamic Interaction of Surface Machine Foundations Under Vertical Harmonic ExcitationDocument18 pagesDynamic Interaction of Surface Machine Foundations Under Vertical Harmonic ExcitationSayed ElarabyPas encore d'évaluation
- 2002 - Kim - Fluid-Structure-Soil Interaction Analysis of Cylindrical Liquid Storage Tanks Subjected To Horizontal Earthquake LoadingDocument24 pages2002 - Kim - Fluid-Structure-Soil Interaction Analysis of Cylindrical Liquid Storage Tanks Subjected To Horizontal Earthquake LoadingpouyaPas encore d'évaluation
- Behavior of Laterally Loaded PilesDocument5 pagesBehavior of Laterally Loaded PilesKittipob M CharoensookPas encore d'évaluation
- Permanent Strains of Piles in Sand Due To Cyclic Lateral LoadsDocument6 pagesPermanent Strains of Piles in Sand Due To Cyclic Lateral LoadsFrancesco ManciniPas encore d'évaluation
- Transmission of Elastic Waves Through A Stratified Solid MediumDocument6 pagesTransmission of Elastic Waves Through A Stratified Solid MediumNajeb PendiamanPas encore d'évaluation
- Response Spectra For Differential Motion of Columns: Mihailo D. Trifunac and Maria I. TodorovskaDocument18 pagesResponse Spectra For Differential Motion of Columns: Mihailo D. Trifunac and Maria I. TodorovskaMarko AdamovićPas encore d'évaluation
- Coastal Engineering: J. Brossard, G. Perret, L. Blonce, A. DiedhiouDocument12 pagesCoastal Engineering: J. Brossard, G. Perret, L. Blonce, A. DiedhiouAbdul AzizPas encore d'évaluation
- Dynamic Stiffness and Seismic Input Motion of A Group of Battered PilesDocument11 pagesDynamic Stiffness and Seismic Input Motion of A Group of Battered PilessugyanibalaPas encore d'évaluation
- Pile Cap Effects On Lateral Response of Pile Groups and Piled RaftsDocument5 pagesPile Cap Effects On Lateral Response of Pile Groups and Piled RaftsDaanyal Ibn UmarPas encore d'évaluation
- 3.nikora Et Al. (2001)Document11 pages3.nikora Et Al. (2001)cntPas encore d'évaluation
- Simplified Analysis of Offshore Piles U N D E R Cyclic Lateral LoadsDocument10 pagesSimplified Analysis of Offshore Piles U N D E R Cyclic Lateral LoadskamalPas encore d'évaluation
- Drag Anchor FlukeDocument6 pagesDrag Anchor FlukesiswouPas encore d'évaluation
- MAKRIS & GAZETAS 1993-GEOT - Displacement Phase Differences in A Harmonically Oscillating PileDocument16 pagesMAKRIS & GAZETAS 1993-GEOT - Displacement Phase Differences in A Harmonically Oscillating PileMarco FrulliniPas encore d'évaluation
- Nwogu Omae 1991Document6 pagesNwogu Omae 1991mohdsolihat1Pas encore d'évaluation
- 10.1016@0263 82318390012 5Document15 pages10.1016@0263 82318390012 5Dhani de EngineurPas encore d'évaluation
- 10 1016@j Oceaneng 2005 11 001Document15 pages10 1016@j Oceaneng 2005 11 001marakaPas encore d'évaluation
- Linear Vibration Analysis of Cantilever Plates Partially Submerged in Uid PDFDocument13 pagesLinear Vibration Analysis of Cantilever Plates Partially Submerged in Uid PDFKing1971Pas encore d'évaluation
- Pole Direct Embedment Into Soil 39-002 PDFDocument24 pagesPole Direct Embedment Into Soil 39-002 PDFsaroiitmPas encore d'évaluation
- Soil Dynamics and Earthquake Engineering: George Anoyatis, Raffaele Di Laora, Alessandro Mandolini, George MylonakisDocument13 pagesSoil Dynamics and Earthquake Engineering: George Anoyatis, Raffaele Di Laora, Alessandro Mandolini, George MylonakisDani SantosPas encore d'évaluation
- A Method For Predicting The Effect of Piles On Slope BehaviourDocument13 pagesA Method For Predicting The Effect of Piles On Slope BehaviourMatteo IzziPas encore d'évaluation
- Indraratna Et Al. 2005Document12 pagesIndraratna Et Al. 2005Manaswini VadlamaniPas encore d'évaluation
- Gazetas (1982) - Shear Vibrations of Vertically Inhomogeneous Earth DamsDocument23 pagesGazetas (1982) - Shear Vibrations of Vertically Inhomogeneous Earth DamsEleni KatsanouPas encore d'évaluation
- Tipical Bearing Capacity of Strip Footings On Eccentric and Inclined LoadsDocument23 pagesTipical Bearing Capacity of Strip Footings On Eccentric and Inclined LoadsEudkrenutPas encore d'évaluation
- Doherty and Deeks (2003) - Elastic Response Circular Footings Non-Homogeneous Half-SpaceDocument12 pagesDoherty and Deeks (2003) - Elastic Response Circular Footings Non-Homogeneous Half-Spacedogen1980Pas encore d'évaluation
- Hall 1982Document28 pagesHall 1982Otoma OrkaidoPas encore d'évaluation
- 4 RiverFlow2006-shearvelocityDocument11 pages4 RiverFlow2006-shearvelocitycntPas encore d'évaluation
- Kausel - Stiffness MatrixDocument19 pagesKausel - Stiffness MatrixkozloPas encore d'évaluation
- Huerre, Monkewitz - Absolute and Convective Instabilities in Free Shear Layers (1985)Document18 pagesHuerre, Monkewitz - Absolute and Convective Instabilities in Free Shear Layers (1985)Aryce_Pas encore d'évaluation
- Depth Factors For Undrained Bearing CapacityDocument4 pagesDepth Factors For Undrained Bearing CapacityHUGIPas encore d'évaluation
- Models - Mph.sloshing TankDocument10 pagesModels - Mph.sloshing Tankcont contaPas encore d'évaluation
- Long Waves in Two-LayersDocument22 pagesLong Waves in Two-LayersBicciqwertyPas encore d'évaluation
- PETSOC 08-03-55 Model WorkDocument7 pagesPETSOC 08-03-55 Model WorkMejbahul SarkerPas encore d'évaluation
- Tank SloshingDocument34 pagesTank SloshingsPas encore d'évaluation
- Heat and Mass Transfer RKRajputDocument131 pagesHeat and Mass Transfer RKRajputanimatedjade50% (2)
- Non Linear Analysis of Piled Raft Foundation HG PoulosDocument9 pagesNon Linear Analysis of Piled Raft Foundation HG Poulospperic13Pas encore d'évaluation
- Pais & Kausel 1988, Approx Stiff SDE (Corrected)Document15 pagesPais & Kausel 1988, Approx Stiff SDE (Corrected)Androutsopoulou MariannaPas encore d'évaluation
- 2-D Transient Soil-Surface Foundation Interaction and Wave Propagation by Time Domain BemDocument15 pages2-D Transient Soil-Surface Foundation Interaction and Wave Propagation by Time Domain BemRobert Alexander Quintero EscobarPas encore d'évaluation
- Lecture Section 3 Sediment TransportDocument38 pagesLecture Section 3 Sediment TransportAbenezer TsegawPas encore d'évaluation
- Brideg&Best 88Document11 pagesBrideg&Best 88MarkovYam OcamDiaPas encore d'évaluation
- Kareem A. Sorathia, Christopher S. Reynolds, Philip J. ArmitageDocument8 pagesKareem A. Sorathia, Christopher S. Reynolds, Philip J. ArmitageksoratPas encore d'évaluation
- CVE12Document10 pagesCVE12taher.nichirvanPas encore d'évaluation
- Press 1961Document8 pagesPress 1961Najeb PendiamanPas encore d'évaluation
- Taiebat & Carter (2010) A-Failure-Surface-For-Circular-Footings-On-Cohesive-SoilsDocument9 pagesTaiebat & Carter (2010) A-Failure-Surface-For-Circular-Footings-On-Cohesive-Soilsdogen1980Pas encore d'évaluation
- Models - Mph.sloshing TankDocument12 pagesModels - Mph.sloshing TankShawkatPas encore d'évaluation
- 1-s2.0-S0377025720301658-main 大波小波Document12 pages1-s2.0-S0377025720301658-main 大波小波丫丫衣衣Pas encore d'évaluation
- Second-Moment Closure Study Rotating Channel: B. E. Launder, D. P. Tselepidakis B. A. YounisDocument13 pagesSecond-Moment Closure Study Rotating Channel: B. E. Launder, D. P. Tselepidakis B. A. Younisyaser AlahmadiPas encore d'évaluation
- Pandit 1998Document51 pagesPandit 1998debaprasad ghoshPas encore d'évaluation
- Randolph1981 PDFDocument13 pagesRandolph1981 PDFSaeedPas encore d'évaluation
- Randolph 1981Document13 pagesRandolph 1981SaeedPas encore d'évaluation
- Maximum Wave-Power AbsorptionDocument17 pagesMaximum Wave-Power AbsorptionBobby maillouxPas encore d'évaluation
- 1984-SDEE - Seismic Response of End-Bearing Single PilesDocument12 pages1984-SDEE - Seismic Response of End-Bearing Single PilesstraullePas encore d'évaluation
- Get CMRP Exam Questions Answers Dumps: Click HereDocument4 pagesGet CMRP Exam Questions Answers Dumps: Click HereSayed Diab AlsayedPas encore d'évaluation
- How Do I Prepare For The CMRP ExamDocument12 pagesHow Do I Prepare For The CMRP ExamSayed Diab AlsayedPas encore d'évaluation
- By Henny Portman, v1.1, May 2014, Based On P3O, TSO, 2013: Senior Supplier(s) Project ExecutiveDocument1 pageBy Henny Portman, v1.1, May 2014, Based On P3O, TSO, 2013: Senior Supplier(s) Project ExecutiveSayed Diab AlsayedPas encore d'évaluation
- A Comprehensive Approach For Maintenance PDFDocument13 pagesA Comprehensive Approach For Maintenance PDFSayed Diab AlsayedPas encore d'évaluation
- SMRP Exam CMRP Certified Maintenance and PDFDocument5 pagesSMRP Exam CMRP Certified Maintenance and PDFrudi setiawan100% (1)
- Compaction Explained For Retaining WallsDocument2 pagesCompaction Explained For Retaining WallsSayed Diab AlsayedPas encore d'évaluation
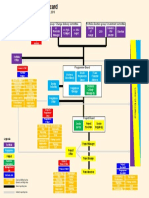
- Approach To A Project Portfolio Management Office From A P30 PerspectiveDocument25 pagesApproach To A Project Portfolio Management Office From A P30 PerspectiveSayed Diab AlsayedPas encore d'évaluation
- Speedy Moisture AASHTO T217Document3 pagesSpeedy Moisture AASHTO T217dep_vinPas encore d'évaluation
- Lab Report: Testing of Wood: 1.0 SummaryDocument4 pagesLab Report: Testing of Wood: 1.0 SummarySayed Diab AlsayedPas encore d'évaluation
- Cabr Brochure - WordDocument40 pagesCabr Brochure - WordSayed Diab AlsayedPas encore d'évaluation
- Info About Cold Extrusion System PDFDocument3 pagesInfo About Cold Extrusion System PDFSayed Diab AlsayedPas encore d'évaluation
- Lesson03 WBTDocument74 pagesLesson03 WBTSayed Diab AlsayedPas encore d'évaluation
- Wood StrengthDocument3 pagesWood StrengthSayed Diab AlsayedPas encore d'évaluation
- Engineering TrackerDocument2 pagesEngineering TrackerSayed Diab AlsayedPas encore d'évaluation
- H 17 NgcoursetextDocument310 pagesH 17 NgcoursetextSayed Diab AlsayedPas encore d'évaluation
- 122 PMP Tricky Questions-Sayed MohsenDocument123 pages122 PMP Tricky Questions-Sayed MohsenSayed Diab Alsayed88% (8)
- 2012 Standard Specification For Highway Construction Vol 1Document471 pages2012 Standard Specification For Highway Construction Vol 1luci99Pas encore d'évaluation
- Phasexiii TorDocument43 pagesPhasexiii TorSayed Diab AlsayedPas encore d'évaluation
- Balance SheetDocument1 pageBalance SheetmohdsevenPas encore d'évaluation
- General Directorate of Traffic Project 2009-2013 SIGNEDDocument55 pagesGeneral Directorate of Traffic Project 2009-2013 SIGNEDSayed Diab AlsayedPas encore d'évaluation
- 30jan20131217564 EvaluationDocument18 pages30jan20131217564 EvaluationSayed Diab AlsayedPas encore d'évaluation
- Capoxy GroutDocument2 pagesCapoxy GroutSayed Diab AlsayedPas encore d'évaluation
- Neoprene Bearing Pad PDFDocument6 pagesNeoprene Bearing Pad PDFSayed Diab AlsayedPas encore d'évaluation
- Cap MicrocreteDocument2 pagesCap MicrocreteSayed Diab AlsayedPas encore d'évaluation
- Effect of Mineral Filler Type and Content On Properties of Asphalt Concrete MixesDocument11 pagesEffect of Mineral Filler Type and Content On Properties of Asphalt Concrete MixesSayed Diab Alsayed100% (1)
- Permeability of Silica Fume and PolypropDocument18 pagesPermeability of Silica Fume and PolypropSayed Diab AlsayedPas encore d'évaluation
- Railway Tor Modified RevDocument24 pagesRailway Tor Modified RevSayed Diab AlsayedPas encore d'évaluation
- NCHRP10-84 FR AppendicesDocument268 pagesNCHRP10-84 FR AppendicesSayed Diab AlsayedPas encore d'évaluation
- Service Life Prediction For Buildings ExDocument5 pagesService Life Prediction For Buildings ExSayed Diab AlsayedPas encore d'évaluation
- Service Manual: MVC-FD85/FD90Document112 pagesService Manual: MVC-FD85/FD90Anonymous Lfgk6vygPas encore d'évaluation
- Chapter 15Document3 pagesChapter 15ram sunderPas encore d'évaluation
- BMS-0000005 Rev 6 Packaging RequirementDocument15 pagesBMS-0000005 Rev 6 Packaging RequirementLaszlo EdesPas encore d'évaluation
- Hierarchical Machine Learning For High-Fidelity 3D Printed BiopolymersDocument11 pagesHierarchical Machine Learning For High-Fidelity 3D Printed Biopolymers刘俊里Pas encore d'évaluation
- BSCPH 202Document4 pagesBSCPH 202pp1560078Pas encore d'évaluation
- Busbar Size CalculationDocument5 pagesBusbar Size Calculationdermasdemo100% (6)
- Steel Bars, Selection Guide, Composition, and Mechanical PropertiesDocument9 pagesSteel Bars, Selection Guide, Composition, and Mechanical PropertiesAnıl ZiylanPas encore d'évaluation
- DTZ1513 Three PhaseDocument108 pagesDTZ1513 Three Phasemep luckyonePas encore d'évaluation
- TurboGen ConstructionDocument71 pagesTurboGen Constructiondevanand_sawantPas encore d'évaluation
- 1.) A.) Fs 8000 T (0:127) /fs y 0.8 Sin (2 Pi 2000 T) Plot (T, Y, 'M - .')Document10 pages1.) A.) Fs 8000 T (0:127) /fs y 0.8 Sin (2 Pi 2000 T) Plot (T, Y, 'M - .')Tetsuya OkazakiPas encore d'évaluation
- Writing Assignment 2 - TelescopesDocument2 pagesWriting Assignment 2 - TelescopesannaPas encore d'évaluation
- Machine Learing Linear System Class NotesDocument43 pagesMachine Learing Linear System Class Notesnaciobin17Pas encore d'évaluation
- Viscolam PS 202 - en 2019Document1 pageViscolam PS 202 - en 2019Duodo NguyenPas encore d'évaluation
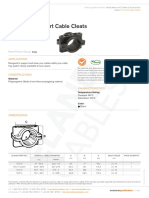
- Two Part Cable CleatsDocument1 pageTwo Part Cable Cleatssaghaee.rezaPas encore d'évaluation
- Unit Operations of Chemical Engineering: (7th Edition)Document3 pagesUnit Operations of Chemical Engineering: (7th Edition)HennessysPas encore d'évaluation
- Electronics Fundamentals: Circuits, Devices, and ApplicationsDocument36 pagesElectronics Fundamentals: Circuits, Devices, and Applicationsmugammad wasimPas encore d'évaluation
- Range 0 - 0.5 A 0-0.1 V 2. Least Count 0.01 A 0.01 V 3. Zero Error (E) 0 0 4. Zero Correction 0 0Document2 pagesRange 0 - 0.5 A 0-0.1 V 2. Least Count 0.01 A 0.01 V 3. Zero Error (E) 0 0 4. Zero Correction 0 0Prathap EducationPas encore d'évaluation
- English Club Junior: Section I General Knowledge Questions (40 Points)Document22 pagesEnglish Club Junior: Section I General Knowledge Questions (40 Points)Mihaela RaduPas encore d'évaluation
- Lap Former The Objective of Lap FormerDocument40 pagesLap Former The Objective of Lap FormerAhmed Ifsan NayeemPas encore d'évaluation
- Macron 14 SpecsheetDocument2 pagesMacron 14 SpecsheetElectromatePas encore d'évaluation
- 141001E - Gimbals For Antenna Radome MeasurementDocument6 pages141001E - Gimbals For Antenna Radome MeasurementasokanenPas encore d'évaluation
- Dayananda Sagar College of Engineering: Nishant Sagar 1DS18EI033Document32 pagesDayananda Sagar College of Engineering: Nishant Sagar 1DS18EI033MELOPas encore d'évaluation
- University of Engineering and Technology, Lahore Department of Electrical EngineeringDocument8 pagesUniversity of Engineering and Technology, Lahore Department of Electrical EngineeringMarwa WaseemPas encore d'évaluation
- Space ScienceDocument17 pagesSpace SciencehuylimalaPas encore d'évaluation
- Satellite StabilizationDocument4 pagesSatellite Stabilizationshakti sindhuPas encore d'évaluation
- Physics Full Book 2013Document4 pagesPhysics Full Book 2013Muhammad Hassan MaqsoodPas encore d'évaluation
- PhysicsDocument19 pagesPhysicsapi-254985234Pas encore d'évaluation
- Structural Design of A Water Intake Tower Located Inside A ReservoirDocument10 pagesStructural Design of A Water Intake Tower Located Inside A ReservoirArifullah WazirPas encore d'évaluation
- USFD ManualDocument120 pagesUSFD Manualsuneelvaram100% (3)
- Welding Procedure Specification's (WPS) : Presented by John Lucas Welding Engineer UTI CorporationDocument30 pagesWelding Procedure Specification's (WPS) : Presented by John Lucas Welding Engineer UTI CorporationCris VillapanaPas encore d'évaluation