Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Second Periodic Test Grade10Document5 pagesSecond Periodic Test Grade10Marl Rina EsperanzaPas encore d'évaluation
- Section 4 Transmission LinesDocument105 pagesSection 4 Transmission LinesAhmedPas encore d'évaluation
- Coimbatore Eng College ListDocument4 pagesCoimbatore Eng College Listrajesh kumarPas encore d'évaluation
- Study On Strengthening of Corrosion Damaged RCC Beam by FerrocementDocument7 pagesStudy On Strengthening of Corrosion Damaged RCC Beam by FerrocementAnonymous CUPykm6DZPas encore d'évaluation
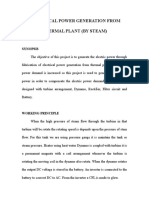
- Fabrication of Electrical Power Generation From Thermal Plant (By Steam)Document3 pagesFabrication of Electrical Power Generation From Thermal Plant (By Steam)rajesh kumarPas encore d'évaluation
- Design and Analysis of Leaf Spring of AnDocument4 pagesDesign and Analysis of Leaf Spring of Anrajesh kumarPas encore d'évaluation
- ME-MTech Thesis FormatDocument13 pagesME-MTech Thesis Formatபுருஷோத்தமன் சரவணன்Pas encore d'évaluation
- UgDocument9 pagesUgrajesh kumarPas encore d'évaluation
- Design and Analysis of Two Wheeler Shock Absorber Coil SpringDocument8 pagesDesign and Analysis of Two Wheeler Shock Absorber Coil SpringVivek VikuPas encore d'évaluation
- Lakshmi Machine Works: Shanthi Gears LTDDocument1 pageLakshmi Machine Works: Shanthi Gears LTDrajesh kumarPas encore d'évaluation
- Study On Strengthening of Corrosion Damaged RCC Beam by FerrocementDocument7 pagesStudy On Strengthening of Corrosion Damaged RCC Beam by FerrocementAnonymous CUPykm6DZPas encore d'évaluation
- Design and Analysis of Two Wheeler Shock Absorber Coil SpringDocument8 pagesDesign and Analysis of Two Wheeler Shock Absorber Coil SpringVivek VikuPas encore d'évaluation
- Battery Specification: Document Number & RevisionDocument23 pagesBattery Specification: Document Number & RevisionEricPas encore d'évaluation
- PC44 Pattern Control: Part 108 099DDocument164 pagesPC44 Pattern Control: Part 108 099DdannysionPas encore d'évaluation
- ISO 11452 4 2001 BCI SampleDocument8 pagesISO 11452 4 2001 BCI SampleSanthosh ManoharanPas encore d'évaluation
- 1931 - Datasheet Sta 3 STP 3 enDocument16 pages1931 - Datasheet Sta 3 STP 3 enSrdjanPas encore d'évaluation
- TPD - R1Document64 pagesTPD - R1Wendy Edwina GemiNastiti RahayuPas encore d'évaluation
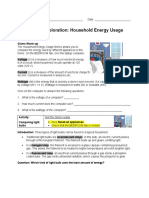
- Student Exploration: Household Energy UsageDocument3 pagesStudent Exploration: Household Energy Usageshamiya farringtonPas encore d'évaluation
- ConductivityDocument4 pagesConductivityAyeshaPas encore d'évaluation
- W22 Smoke Extraction: Motor For Smoke Exhaustion African MarketDocument60 pagesW22 Smoke Extraction: Motor For Smoke Exhaustion African MarketAgustynho MagimbaPas encore d'évaluation
- Excel Load CalculatorDocument5 pagesExcel Load CalculatorArideepPas encore d'évaluation
- Arduino Based Third Eye For Blind PeopleDocument7 pagesArduino Based Third Eye For Blind PeopleIJRASETPublicationsPas encore d'évaluation
- Adc 24 Bits Ads1243Document35 pagesAdc 24 Bits Ads1243juanPas encore d'évaluation
- VSX 323 KDocument26 pagesVSX 323 KCeplos BGNPas encore d'évaluation
- V3000Document8 pagesV3000ranaway1Pas encore d'évaluation
- N2xsy Sni IecDocument5 pagesN2xsy Sni IecMario SitorusPas encore d'évaluation
- سلايدات تحليل 1Document139 pagesسلايدات تحليل 1ameralmajali123Pas encore d'évaluation
- Chapter Two (Instrumentation)Document26 pagesChapter Two (Instrumentation)tsehay girmaPas encore d'évaluation
- Yagi Uda AntennaDocument14 pagesYagi Uda AntennaKeerthi Vasan SPas encore d'évaluation
- Spc-24 Projected Beam Smoke Detector: ApplicationDocument2 pagesSpc-24 Projected Beam Smoke Detector: ApplicationRdb HaxorPas encore d'évaluation
- 1d679474 D9ed 42f9 848d 2ce5b024a610 PDFDocument2 pages1d679474 D9ed 42f9 848d 2ce5b024a610 PDFHafizna Arsyil FadhliPas encore d'évaluation
- L&T Price ListDocument40 pagesL&T Price ListAshish Marotkar80% (5)
- UV Charger Retrofit Kit 25500365A0 - 1216Document20 pagesUV Charger Retrofit Kit 25500365A0 - 1216Carlos VélizPas encore d'évaluation
- Digital Key Coded LockDocument11 pagesDigital Key Coded LockEngr. Zeeshan mohsin100% (1)
- High Voltage Transient AnalysisDocument11 pagesHigh Voltage Transient AnalysiskasunchamaraPas encore d'évaluation
- Electrical Wire InformationDocument10 pagesElectrical Wire InformationRana M. Zagham AliPas encore d'évaluation
- C45db97118a2Document85 pagesC45db97118a2anilr008100% (1)
- Kinetix 6000 Multi-Axis Servo Drive: Installation ManualDocument255 pagesKinetix 6000 Multi-Axis Servo Drive: Installation ManualLuis Claudio Ramos100% (1)
- G130 - GENIE C14 MicrocontrollerDocument1 pageG130 - GENIE C14 MicrocontrollerAsseel FleihanPas encore d'évaluation
- Testing and Commissioning of MVHV CablesDocument7 pagesTesting and Commissioning of MVHV CablesFernando Patiño GuevaraPas encore d'évaluation