Vous aimerez peut-être aussi
- Métodos Matriciales para ingenieros con MATLABD'EverandMétodos Matriciales para ingenieros con MATLABÉvaluation : 5 sur 5 étoiles5/5 (1)
- Ensayo ProctorDocument15 pagesEnsayo ProctorEdú Moreno RiveraPas encore d'évaluation
- PRÁCTICA #03 Simplificación de Expresiones BooleanasDocument6 pagesPRÁCTICA #03 Simplificación de Expresiones BooleanasAlvaro Portillo GuevaraPas encore d'évaluation
- Parámetros Denavit-HartenbergDocument4 pagesParámetros Denavit-HartenbergCuenta FakePas encore d'évaluation
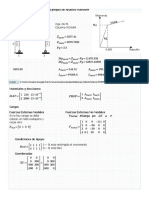
- Ejemplo PushoverDocument26 pagesEjemplo Pushoverblenaz19Pas encore d'évaluation
- Brazo RobóticoDocument21 pagesBrazo RobóticoAmanda Zeledon100% (1)
- Cinemática Directa DHDocument8 pagesCinemática Directa DHdfgdfghb bfghdthdhPas encore d'évaluation
- Colaborativo 2 Luis UrresteDocument24 pagesColaborativo 2 Luis Urresteluis eduardo100% (1)
- Paso1 Grupo3Document10 pagesPaso1 Grupo3XimenaLadinoPas encore d'évaluation
- Tarea Académica N°3-Acosta Alvino AnalizDocument6 pagesTarea Académica N°3-Acosta Alvino AnalizAnaliz S. Acosta AlvinoPas encore d'évaluation
- 4.-Tarea Académica N4 G1 PDFDocument10 pages4.-Tarea Académica N4 G1 PDFAnaliz S. Acosta AlvinoPas encore d'évaluation
- Pregunta #01Document7 pagesPregunta #01ANGHELO DGPas encore d'évaluation
- Parámetros D-H Robot ABB IRB4400Document10 pagesParámetros D-H Robot ABB IRB4400Jheral Ramírez NavarroPas encore d'évaluation
- Procedimiento CD RobotYumiDocument10 pagesProcedimiento CD RobotYumiJosé Guadalupe SánchezPas encore d'évaluation
- TAREA2Document6 pagesTAREA2Mc DacronerPas encore d'évaluation
- Convenciones de TransformaciónDocument17 pagesConvenciones de Transformaciónsergio acuñaPas encore d'évaluation
- Actividad 6. Robotica. Marco Gordillo. Carlos Urbieta. Noe CobDocument4 pagesActividad 6. Robotica. Marco Gordillo. Carlos Urbieta. Noe CobCarlos UrbietaPas encore d'évaluation
- Defaz Bryan Tarea2 2parcial 7623Document20 pagesDefaz Bryan Tarea2 2parcial 7623BRYAN FERNANDO DEFAZ CORDOVAPas encore d'évaluation
- Capitulo 7 CINEMATICA DE ROBOTS INDUSTRIALESDocument65 pagesCapitulo 7 CINEMATICA DE ROBOTS INDUSTRIALESDanny LopezPas encore d'évaluation
- Portafolio de EvidenciasDocument13 pagesPortafolio de EvidenciasRigoberto XVIIIPas encore d'évaluation
- Previo Labo 2Document6 pagesPrevio Labo 2Johan Romero LimaPas encore d'évaluation
- Metodo D-H de Cinematica Directa-RoboticaDocument9 pagesMetodo D-H de Cinematica Directa-RoboticaAnel Olivares CruzPas encore d'évaluation
- Analisis Cinematico SCARADocument9 pagesAnalisis Cinematico SCARAcris lopezPas encore d'évaluation
- Informe 2Document12 pagesInforme 2Martín NarvaezPas encore d'évaluation
- Taller de Robotica 2 JPMGDocument9 pagesTaller de Robotica 2 JPMGJP MGPas encore d'évaluation
- Rodriguez PC02Document7 pagesRodriguez PC02Gianfranco RodriguezPas encore d'évaluation
- Seleccionador de Cajas Por TamañoDocument16 pagesSeleccionador de Cajas Por TamañoXiomara Cano CalderónPas encore d'évaluation
- TP5 - Álgebra de BooleDocument5 pagesTP5 - Álgebra de BooleRomina GómezPas encore d'évaluation
- Modelos cinemáticos robotsDocument4 pagesModelos cinemáticos robotsrobertoPas encore d'évaluation
- Práctica 1 Sesión 2Document8 pagesPráctica 1 Sesión 2jowarPas encore d'évaluation
- Examen Final de Control I 2017-2Document6 pagesExamen Final de Control I 2017-2daniel garcia garcia100% (1)
- Practica 2Document7 pagesPractica 2Angel CondePas encore d'évaluation
- Circuitos Clase No12Document16 pagesCircuitos Clase No12LUISPas encore d'évaluation
- 3 - Algebra de BooleDocument44 pages3 - Algebra de BooleBrandon DamianPas encore d'évaluation
- INFORME PREVIO7 Casimiro Sistemas DigitalesDocument12 pagesINFORME PREVIO7 Casimiro Sistemas DigitalesEdwin ToledoPas encore d'évaluation
- Informe Previo 2Document11 pagesInforme Previo 2RENZO JOEL PUMACALLAO ROLDANPas encore d'évaluation
- TRABAJO4Document11 pagesTRABAJO4Andres MachucaPas encore d'évaluation
- Resolución de problemas cinemáticos y dinámicos para robots SCARA y planos de 2 grados de libertadDocument4 pagesResolución de problemas cinemáticos y dinámicos para robots SCARA y planos de 2 grados de libertaddfgdfghb bfghdthdhPas encore d'évaluation
- Cinematica Inversa B II CorteDocument4 pagesCinematica Inversa B II CorteJesus QuiñonezPas encore d'évaluation
- Simplificación algebraica e implementación de circuitos lógicos con compuertas NANDDocument8 pagesSimplificación algebraica e implementación de circuitos lógicos con compuertas NANDJhonatan Rios LedezmaPas encore d'évaluation
- Ejercicios de Relaciones de Orden ParcialDocument5 pagesEjercicios de Relaciones de Orden ParcialrobertoPas encore d'évaluation
- P4SU Jowar y JeancarDocument10 pagesP4SU Jowar y JeancarjowarPas encore d'évaluation
- Tarea #2 LogicaDocument6 pagesTarea #2 Logicajugador jugadoPas encore d'évaluation
- CE91 Actividad Colaborativa 5 1 SOL E41BDocument11 pagesCE91 Actividad Colaborativa 5 1 SOL E41Bcesar salasPas encore d'évaluation
- Cálculo de la matriz de rigidez global para una placa empotrada con 4 elementos finitos usando el método de elementos finitosDocument27 pagesCálculo de la matriz de rigidez global para una placa empotrada con 4 elementos finitos usando el método de elementos finitosElvis Ramos TasaycoPas encore d'évaluation
- Matrices de Lorentz LyLzLxDocument2 pagesMatrices de Lorentz LyLzLxIlhuicatl XipetlacatlPas encore d'évaluation
- Examen 3Document8 pagesExamen 3Mileth ValenciaPas encore d'évaluation
- Practica02-Diseño DigitalDocument8 pagesPractica02-Diseño DigitalNaho LPas encore d'évaluation
- Actividad de Aprendizaje No 3 Analisis y Diseno de CircuitosDocument4 pagesActividad de Aprendizaje No 3 Analisis y Diseno de CircuitosDark Angel26Pas encore d'évaluation
- 8º Congreso Iberoamericano de Ingenieria MecanicaDocument9 pages8º Congreso Iberoamericano de Ingenieria MecanicaJosue M. HernandezPas encore d'évaluation
- Sistema mecánico traslacional modelado en espacio de estado y hallando su función de transferenciaDocument7 pagesSistema mecánico traslacional modelado en espacio de estado y hallando su función de transferenciaGabriela MoralesPas encore d'évaluation
- MICROCONTROLADORESDocument7 pagesMICROCONTROLADORESCESAR GIOVANNY MORENO RODRIGUEZ100% (1)
- Practica1-05GIIN-Christian Franco de OliveiraDocument12 pagesPractica1-05GIIN-Christian Franco de OliveiraChristian FrancoPas encore d'évaluation
- Fase 3 - Gabriela Restrepo PáezDocument8 pagesFase 3 - Gabriela Restrepo PáezMiguel Angel Mendigaño ArismendyPas encore d'évaluation
- Tarea4 16 Melanie RiveraDocument11 pagesTarea4 16 Melanie Riverariveramelanie720Pas encore d'évaluation
- Tarea - U1 - Clase 4 - S1Document2 pagesTarea - U1 - Clase 4 - S1Lisbeth Morales100% (1)
- Universidad Nacional de Ingeniería - Lab1Document12 pagesUniversidad Nacional de Ingeniería - Lab1Stalin GuzmánPas encore d'évaluation
- Taller RoboticaDocument10 pagesTaller RoboticaxavierPas encore d'évaluation
- Trabajo Final Seminario de Investigación 1Document7 pagesTrabajo Final Seminario de Investigación 1Livis PerezPas encore d'évaluation
- LEXICOLOGIAICDDocument5 pagesLEXICOLOGIAICDAhrix SanderPas encore d'évaluation
- Quimica IsomeríaDocument9 pagesQuimica IsomeríaJohan Manuel Gamez MendozaPas encore d'évaluation
- Nota de VentaDocument2 pagesNota de Ventaisai santosPas encore d'évaluation
- Planificación y Gestión Integrada de La Zona Marina Costera Del CallaoDocument6 pagesPlanificación y Gestión Integrada de La Zona Marina Costera Del CallaoJoel Medina GuttiPas encore d'évaluation
- Auditoría de Seguridad IndustrialDocument96 pagesAuditoría de Seguridad IndustrialCiroPas encore d'évaluation
- 1.1el Comercio Del Libro en La Nueva España.Document9 pages1.1el Comercio Del Libro en La Nueva España.Alfonso Isaac Delgado ValenciaPas encore d'évaluation
- Bitácora1 Fase de InformaciónDocument2 pagesBitácora1 Fase de InformaciónCristoffer VacaPas encore d'évaluation
- Solicitud Salvo ConductoDocument2 pagesSolicitud Salvo ConductoJorge Bacuilima MoraPas encore d'évaluation
- LABORATORIO No 5 LEY DE SNELL 1Document2 pagesLABORATORIO No 5 LEY DE SNELL 1Manuela romero osorioPas encore d'évaluation
- Parte 2 Texto Reflexivo Sobre Los Procesos de Aprendizaje y La EvaluaciónDocument4 pagesParte 2 Texto Reflexivo Sobre Los Procesos de Aprendizaje y La EvaluaciónSebastian HernandezPas encore d'évaluation
- LeguminosasDocument6 pagesLeguminosasAntonia Paz Taucana Diaz100% (1)
- Prácticas ATV312Document61 pagesPrácticas ATV312Sergio Galán NúñezPas encore d'évaluation
- Escrito de Acusacion Nuc 563202250309 Inas AlimDocument5 pagesEscrito de Acusacion Nuc 563202250309 Inas AlimMarlly ParradoPas encore d'évaluation
- Saberes Mínimos 1ºDocument2 pagesSaberes Mínimos 1ºabelardo ruizPas encore d'évaluation
- Implantación de La Estrategia LogísticaDocument45 pagesImplantación de La Estrategia LogísticaAbel Insua LagoPas encore d'évaluation
- Casos Prácticos de Contabilidad de FranquiciaDocument2 pagesCasos Prácticos de Contabilidad de FranquiciaLuis Alfonso Magaña ramosPas encore d'évaluation
- Guia de Etica y Valores Del 27 Al 01 de OctubreDocument3 pagesGuia de Etica y Valores Del 27 Al 01 de OctubreLAURAPas encore d'évaluation
- Problemas PC3Document3 pagesProblemas PC3LUIS RODRIGO KEVIN GOMEZ CHAVEZPas encore d'évaluation
- Prueba Lectura Complementaria - LOS MEJORES AMIGOSDocument6 pagesPrueba Lectura Complementaria - LOS MEJORES AMIGOSmvarasePas encore d'évaluation
- 2do Avance Dise - o Plan de MarketingDocument24 pages2do Avance Dise - o Plan de MarketingRenzo Alberto Osorio LenchPas encore d'évaluation
- PORTAFOLIO DE TRABAJOS DE ARQUITECTURA 2013, Arq Oscar Daniel Contreras CaroDocument31 pagesPORTAFOLIO DE TRABAJOS DE ARQUITECTURA 2013, Arq Oscar Daniel Contreras Carooscar daniel contrerasPas encore d'évaluation
- Estudio Caso 1Document3 pagesEstudio Caso 1brayan zuñiga villegasPas encore d'évaluation
- Tuberculosis CutáneaDocument31 pagesTuberculosis Cutáneajuan carosPas encore d'évaluation
- 3 Chichi ZolaDocument28 pages3 Chichi ZolaRocio TerronesPas encore d'évaluation
- Catalogo RadiologiaDocument236 pagesCatalogo RadiologiaRominaPas encore d'évaluation
- UntitledDocument306 pagesUntitledElvia RojasPas encore d'évaluation
- Ambriz Alheli Act03Document14 pagesAmbriz Alheli Act03dra.brenda.gutierrezcalderonPas encore d'évaluation