Vous aimerez peut-être aussi
- Measurement Uncertainty: Understanding and Economic BenefitsDocument8 pagesMeasurement Uncertainty: Understanding and Economic Benefitscamohunter710% (1)
- Mechanics of Composite Structural Elements PDFDocument518 pagesMechanics of Composite Structural Elements PDFJose Manuel Daza OlavePas encore d'évaluation
- Maan H. Jawad (Auth.) - Theory and Design of Plate and Shell Structures-Springer US (1994)Document434 pagesMaan H. Jawad (Auth.) - Theory and Design of Plate and Shell Structures-Springer US (1994)ascanioba100% (5)
- Is 800:2007Document150 pagesIs 800:2007crajtry100% (2)
- Shell Elements ABAQUSDocument45 pagesShell Elements ABAQUSSsr Saane71% (7)
- Guidelines For Steel Girder Bridge Analysis'Document154 pagesGuidelines For Steel Girder Bridge Analysis'm4004Pas encore d'évaluation
- Wind Tunnel Calibration MemoDocument5 pagesWind Tunnel Calibration Memoapi-512393144Pas encore d'évaluation
- 2130 PPT PeakVueCaseDocument98 pages2130 PPT PeakVueCasesebastian100% (1)
- Composite Materials Module Users GuideDocument48 pagesComposite Materials Module Users GuideGuillermo CeosPas encore d'évaluation
- A Formulation of General Shell Elements - The Use of Mixed Interpolation of Tensorial Components PDFDocument26 pagesA Formulation of General Shell Elements - The Use of Mixed Interpolation of Tensorial Components PDFharishram123456Pas encore d'évaluation
- FE Structural Analysis On An ExcelDocument27 pagesFE Structural Analysis On An Excelchuckhsu124867% (3)
- Tensors Poor ManDocument42 pagesTensors Poor ManAlan TuringPas encore d'évaluation
- Hazardous Waste Management ProtocolDocument57 pagesHazardous Waste Management ProtocolAlan TuringPas encore d'évaluation
- Vdoc - Pub Introduction To The Finite Element MethodDocument216 pagesVdoc - Pub Introduction To The Finite Element MethodHuseinPas encore d'évaluation
- Theory ALE CFD SPHDocument34 pagesTheory ALE CFD SPHSanthosh LingappaPas encore d'évaluation
- Shear Centre of C-Channel SectionDocument12 pagesShear Centre of C-Channel SectionAshrafur Rahman100% (1)
- RC Design of 2D Structures - Theorectical BackgroundDocument90 pagesRC Design of 2D Structures - Theorectical BackgroundMartinPas encore d'évaluation
- Chem142 - Calib - Report - Gradescope - 021819 - MAC-1 19.19.46Document4 pagesChem142 - Calib - Report - Gradescope - 021819 - MAC-1 19.19.46xuanziPas encore d'évaluation
- Grain Size of Metallic Strip: Test SpecificationDocument17 pagesGrain Size of Metallic Strip: Test SpecificationCaroEllPas encore d'évaluation
- Natural Vibrations of A Spring Mass SystemDocument5 pagesNatural Vibrations of A Spring Mass SystemSreevatsan M D 19BME1252Pas encore d'évaluation
- DOE AnalysisDocument5 pagesDOE Analysisbigoten13Pas encore d'évaluation
- Analisis Regresi Dan Korelasi Linear BergandaDocument9 pagesAnalisis Regresi Dan Korelasi Linear BergandaNani BaggioPas encore d'évaluation
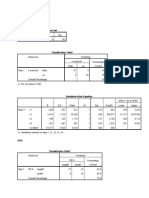
- Case Processing Summary and Logistic Regression AnalysisDocument5 pagesCase Processing Summary and Logistic Regression AnalysisSelf ImprovementPas encore d'évaluation
- Measuring Material Properties Lab ReportDocument2 pagesMeasuring Material Properties Lab ReportcarlosPas encore d'évaluation
- Kebiasaan Merokok: Hosmer and Lemeshow TestDocument5 pagesKebiasaan Merokok: Hosmer and Lemeshow TestTata ilmi KharismaPas encore d'évaluation
- Hooke's Law Inquiry Lab: Naum SennicovDocument5 pagesHooke's Law Inquiry Lab: Naum SennicovAnanya Sharma - Lincoln Alexander SS (2132)Pas encore d'évaluation
- 内容1-HL revision guideDocument231 pages内容1-HL revision guide2193693752Pas encore d'évaluation
- MIL-HDBK-217F: 9.14 Resistors, Variable, Composition Specification Style Description MIL-R-94 RVDocument1 pageMIL-HDBK-217F: 9.14 Resistors, Variable, Composition Specification Style Description MIL-R-94 RVgokulPas encore d'évaluation
- Appendix A: Lab Report FormatDocument10 pagesAppendix A: Lab Report Formatahsan aliPas encore d'évaluation
- Lampiran Output SPSS Uji Analisis DeskriptivDocument2 pagesLampiran Output SPSS Uji Analisis DeskriptivwahyuningsihPas encore d'évaluation
- Bab 7.4Document13 pagesBab 7.4rizkaPas encore d'évaluation
- Session: Modeling, Simulation and OptimizationDocument31 pagesSession: Modeling, Simulation and Optimizationcygnumvignesh89Pas encore d'évaluation
- Oup 6Document48 pagesOup 6TAMIZHAN APas encore d'évaluation
- Correlations SPSSDocument7 pagesCorrelations SPSSNUR AINEE FARHANA HASAINIPas encore d'évaluation
- Balancing A Rigid Rotor Lab ReportDocument11 pagesBalancing A Rigid Rotor Lab ReportPatil Amol PandurangPas encore d'évaluation
- Regresi SederhanaDocument6 pagesRegresi SederhanaTrii WulLandarii127Pas encore d'évaluation
- Assignment IV ProbabilityDocument18 pagesAssignment IV ProbabilitykamaranjPas encore d'évaluation
- Statistik Tugas (I Nyoman Semara Yasa) - (20011080)Document6 pagesStatistik Tugas (I Nyoman Semara Yasa) - (20011080)Gede WirawanPas encore d'évaluation
- Transportation research analyzes pavement temperature dataDocument1 pageTransportation research analyzes pavement temperature databartkkkkkkkkkkkPas encore d'évaluation
- Pt. Mitra SK Analisa Testama: Jl. Rapak Indah 189 Samarinda Kalimantan Timur - IndonesiaDocument16 pagesPt. Mitra SK Analisa Testama: Jl. Rapak Indah 189 Samarinda Kalimantan Timur - IndonesiaTommy SitanggangPas encore d'évaluation
- Che 310 Tutorial QuestionsDocument8 pagesChe 310 Tutorial Questionsbaddierobie12Pas encore d'évaluation
- OLAH DATA - Humam Juzaili Afif - J3E116060Document13 pagesOLAH DATA - Humam Juzaili Afif - J3E116060Humam Juzaili AfifPas encore d'évaluation
- Procedure and Specifications FOR: Wind Load AnalysisDocument29 pagesProcedure and Specifications FOR: Wind Load Analysismatthew cometaPas encore d'évaluation
- Indeterminate BeamDocument12 pagesIndeterminate Beamnasrul najmiPas encore d'évaluation
- Sele 2Document18 pagesSele 2Sri Hariani MarpaungPas encore d'évaluation
- Edwards & Wassel - 1973Document2 pagesEdwards & Wassel - 1973Jairo Silva CoreaPas encore d'évaluation
- Free Vibration of A Single Degree of Freedom SystemDocument6 pagesFree Vibration of A Single Degree of Freedom SystemStephaniePas encore d'évaluation
- 1 Regression: Variables Entered/RemovedDocument3 pages1 Regression: Variables Entered/RemovedNIRUPAMA SINGH BPas encore d'évaluation
- Final MutiDocument5 pagesFinal MutiTai SonsurkPas encore d'évaluation
- Regresi BergandaDocument7 pagesRegresi BergandaPeridaBertuPas encore d'évaluation
- Gawronski: Experiment ,'Document7 pagesGawronski: Experiment ,'Manoj KumarPas encore d'évaluation
- API 1104 Appendix A - Alternative Acceptance Criteria: Pipeline NameDocument8 pagesAPI 1104 Appendix A - Alternative Acceptance Criteria: Pipeline Namesamkarthik47Pas encore d'évaluation
- Lab 2 Strain GuageDocument5 pagesLab 2 Strain GuageMuhammad Arslan AfzalPas encore d'évaluation
- Calibration Methods For An Aerolab 375 Sting Balance To Be Used in Wind Tunnel TestingDocument47 pagesCalibration Methods For An Aerolab 375 Sting Balance To Be Used in Wind Tunnel TestingChan Mark AyapanaPas encore d'évaluation
- 1986 - Prediction of Properties of Petroleum Mixtures - Improvement in Reliability and Validity of Tuned ParametersDocument8 pages1986 - Prediction of Properties of Petroleum Mixtures - Improvement in Reliability and Validity of Tuned ParametersRosendo Monroy LoperenaPas encore d'évaluation
- Smart Ground MultimeterDocument49 pagesSmart Ground MultimeterdorferalanPas encore d'évaluation
- Lab M1Document7 pagesLab M1Misbah TehseenPas encore d'évaluation
- Formula Determines Mandibular Canine RetractionDocument3 pagesFormula Determines Mandibular Canine RetractionMirnaLizPas encore d'évaluation
- Fluid Dynamics: Impinging Jet Experiment ReportDocument16 pagesFluid Dynamics: Impinging Jet Experiment ReportAmar BayasgalanPas encore d'évaluation
- 10.11.2018 Variables Nominales U OrdinalesDocument11 pages10.11.2018 Variables Nominales U OrdinalesTony CastellanosPas encore d'évaluation
- Assignment 1Document7 pagesAssignment 1Being Indian100% (1)
- Portal FrameDocument15 pagesPortal FramenicholasPas encore d'évaluation
- Paper - 1977 - The Stochastic Control of The F-8C Aircraft Using A Multiple Model Adaptive Control Part I - Michael AthansDocument13 pagesPaper - 1977 - The Stochastic Control of The F-8C Aircraft Using A Multiple Model Adaptive Control Part I - Michael AthansSinggih Satrio WibowoPas encore d'évaluation
- Ohm's Law and Resistor Rules ExplainedDocument7 pagesOhm's Law and Resistor Rules ExplainedMickey AngeloPas encore d'évaluation
- PTH Intrap RUO 2019-23 DxI 600 To DxI 800Document2 pagesPTH Intrap RUO 2019-23 DxI 600 To DxI 800zaid atcPas encore d'évaluation
- Outputbaocao Lai Thi Huyen TraDocument11 pagesOutputbaocao Lai Thi Huyen TraHuyền TràPas encore d'évaluation
- MSA 3rd Ed With ANOVA 14 PartsDocument14 pagesMSA 3rd Ed With ANOVA 14 PartsMahendraPas encore d'évaluation
- Regression Analysis of Factors Affecting Audit QualityDocument3 pagesRegression Analysis of Factors Affecting Audit QualityFitria MaharaniPas encore d'évaluation
- Struktur Modal Olah DataDocument7 pagesStruktur Modal Olah Datahady putraPas encore d'évaluation
- 1997 Gioncu & Petcu - Available Rotation Capacity of Wide-Flange Beams and Beam-Columns Part 2. Experimental and Numerical TestsDocument26 pages1997 Gioncu & Petcu - Available Rotation Capacity of Wide-Flange Beams and Beam-Columns Part 2. Experimental and Numerical TestsAKPas encore d'évaluation
- Optimal Seismic Deconvolution: An Estimation-Based ApproachD'EverandOptimal Seismic Deconvolution: An Estimation-Based ApproachPas encore d'évaluation
- Spectrometric TechniquesD'EverandSpectrometric TechniquesGeorge VanassePas encore d'évaluation
- Midsem Onw Lecture NotesDocument28 pagesMidsem Onw Lecture NotesAlan TuringPas encore d'évaluation
- Chap7Document20 pagesChap7Alan TuringPas encore d'évaluation
- Top Soil Mgnt.Document15 pagesTop Soil Mgnt.Alan TuringPas encore d'évaluation
- FEM 1 9 8node 2DDocument10 pagesFEM 1 9 8node 2DMuhannad AbdulRaoufPas encore d'évaluation
- Latex Quickguide PDFDocument2 pagesLatex Quickguide PDFMalkavian KhaozPas encore d'évaluation
- MEMB343 Formula Sheet PDFDocument3 pagesMEMB343 Formula Sheet PDFGautham Raavo PainaiduPas encore d'évaluation
- SalerioDocument28 pagesSalerioRizqaFebrilianyPas encore d'évaluation
- Estimation of Transverse/interlaminar Stresses in Laminated Composites Selective Review and Survey of Current DevelopmentsDocument23 pagesEstimation of Transverse/interlaminar Stresses in Laminated Composites Selective Review and Survey of Current DevelopmentsAlan TuringPas encore d'évaluation
- Composite Structures: Huu-Tai Thai, Dong-Ho ChoiDocument10 pagesComposite Structures: Huu-Tai Thai, Dong-Ho ChoiAlan TuringPas encore d'évaluation
- Gre Magoosh Practice QuestionsDocument10 pagesGre Magoosh Practice QuestionsNabiha RazaPas encore d'évaluation
- SyllabusDocument1 pageSyllabusAlan TuringPas encore d'évaluation
- 695 - MSC - Software-Esercitazione - 2 - (Elementi 2D)Document73 pages695 - MSC - Software-Esercitazione - 2 - (Elementi 2D)Dani Quirante Flaaut EtcPas encore d'évaluation
- 7315044Document2 pages7315044Jay Patel0% (1)
- Sayyad 2015Document25 pagesSayyad 2015Hichem SofPas encore d'évaluation
- 06 PlateTheory 09 StrainEnergyDocument4 pages06 PlateTheory 09 StrainEnergyZaid MohammadPas encore d'évaluation
- On Isothermal Flow of Viscous Liquids Thorugh Screw PumpsDocument218 pagesOn Isothermal Flow of Viscous Liquids Thorugh Screw PumpsRicardo BarrosPas encore d'évaluation
- XLAM Design GuideDocument31 pagesXLAM Design GuideRadekPas encore d'évaluation
- Composite SnapthroughDocument18 pagesComposite Snapthroughktjayakumar3878Pas encore d'évaluation
- Codal Provisions For Pile FoundationDocument12 pagesCodal Provisions For Pile FoundationAshutoshWankhade100% (1)
- Kirchhoff-Love Plate Theory - Wikipedia, The Free EncyclopediaDocument12 pagesKirchhoff-Love Plate Theory - Wikipedia, The Free EncyclopediaV ARUL RAJPas encore d'évaluation
- Elastic Foundation AnalysisDocument6 pagesElastic Foundation AnalysismatmeanPas encore d'évaluation
- The Evolution of Analysis Methods For Laterally Loaded Piles Through TimeDocument31 pagesThe Evolution of Analysis Methods For Laterally Loaded Piles Through TimeBabaPas encore d'évaluation
- Lec1c IntroFEMDocument23 pagesLec1c IntroFEMengkjPas encore d'évaluation
- Unit 10 - Week 7: Assignment 7Document5 pagesUnit 10 - Week 7: Assignment 7Umamaheswararao TumatiPas encore d'évaluation
- Dimensional Analysis in NDT Rigid Pavement EvaluationDocument14 pagesDimensional Analysis in NDT Rigid Pavement EvaluationAnabelPradoSPas encore d'évaluation
- Impact On Composite StructuresDocument301 pagesImpact On Composite StructuresMahadevan Lakshmanan100% (1)
- Analytical Modeling of Bending and Vibration of Thick Advanced Composite Plates Using A Four-Variable Quasi 3D HSDTDocument15 pagesAnalytical Modeling of Bending and Vibration of Thick Advanced Composite Plates Using A Four-Variable Quasi 3D HSDTHic Hem AvgPas encore d'évaluation
- Introduction to Plate Theory in 40 CharactersDocument41 pagesIntroduction to Plate Theory in 40 CharactersCHANDRA MANI GUPTAPas encore d'évaluation
- Belabed 2014Document10 pagesBelabed 2014Hakim KaciPas encore d'évaluation
- Statics and Dynamics of Super Elliptical Homogeous and FGM Plates (Homojen Ve FGM Süper Eliptik Plakların Statik Ve Dinamiği)Document92 pagesStatics and Dynamics of Super Elliptical Homogeous and FGM Plates (Homojen Ve FGM Süper Eliptik Plakların Statik Ve Dinamiği)Çağrı KARABİLLİOĞLUPas encore d'évaluation
- A Continuum Mechanics Based Four Node Shell Element - Dvorkin & BatheDocument12 pagesA Continuum Mechanics Based Four Node Shell Element - Dvorkin & BatheAndrés MercadoPas encore d'évaluation
- Topics in Ship Structural Design: Lecture 5 Buckling and Ultimate Strength of PlatesDocument57 pagesTopics in Ship Structural Design: Lecture 5 Buckling and Ultimate Strength of Platesricardi aryo bimoPas encore d'évaluation
- Assessment of Shear Deformation Theories For Multilayered Composite PlatesDocument13 pagesAssessment of Shear Deformation Theories For Multilayered Composite Platesiname11Pas encore d'évaluation