Vous aimerez peut-être aussi
- Solution Quiz 1 Robotics BEE 7B 11112023 063631pmDocument1 pageSolution Quiz 1 Robotics BEE 7B 11112023 063631pmAHSAN HAMEEDPas encore d'évaluation
- Solving ForDocument3 pagesSolving ForNguyễn Phú ThạnhPas encore d'évaluation
- Solving ForDocument3 pagesSolving ForNguyễn Phú ThạnhPas encore d'évaluation
- Jercicios QuternionDocument37 pagesJercicios QuternionhectorandresonaPas encore d'évaluation
- Matrices: Operaciones Sobre Matrices, Matrices Elementales.: U 2i+9 J UDocument5 pagesMatrices: Operaciones Sobre Matrices, Matrices Elementales.: U 2i+9 J UMARCO AURELIO CASTILLO VIRGENPas encore d'évaluation
- Matrices: Operaciones Sobre Matrices, Matrices Elementales.: U 2i+9 J UDocument5 pagesMatrices: Operaciones Sobre Matrices, Matrices Elementales.: U 2i+9 J UMARCO AURELIO CASTILLO VIRGENPas encore d'évaluation
- Matrices: Operaciones Sobre Matrices, Matrices Elementales.: U 2i+9 J UDocument5 pagesMatrices: Operaciones Sobre Matrices, Matrices Elementales.: U 2i+9 J UMARCO AURELIO CASTILLO VIRGENPas encore d'évaluation
- Alevelsb cp1 Ex7eDocument3 pagesAlevelsb cp1 Ex7ethunderfix27Pas encore d'évaluation
- Solution Quiz 2 Robotics BEE 7C 11112023 055956pmDocument1 pageSolution Quiz 2 Robotics BEE 7C 11112023 055956pmAHSAN HAMEEDPas encore d'évaluation
- Tugas Kelompok Ke-2 Minggu 4: MATH6162 - MathematicsDocument5 pagesTugas Kelompok Ke-2 Minggu 4: MATH6162 - MathematicsnofrijalPas encore d'évaluation
- Quiz 1Document3 pagesQuiz 1LaurentiusDamasSulistyaPas encore d'évaluation
- REG NO: 15BEE0305 Name: Madhankumar.S Sub: Robotics and Control Slot: A1Document8 pagesREG NO: 15BEE0305 Name: Madhankumar.S Sub: Robotics and Control Slot: A1Madhan kumarPas encore d'évaluation
- CalculusDocument9 pagesCalculusMel PubgmPas encore d'évaluation
- ∂ k ∂ ˙q m l I I m d θ m d ∂ k ∂ q m d θ ∂ v ∂ q g m l m d gmDocument3 pages∂ k ∂ ˙q m l I I m d θ m d ∂ k ∂ q m d θ ∂ v ∂ q g m l m d gmDanielPas encore d'évaluation
- Introduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)Document5 pagesIntroduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)علي كامل الاسديPas encore d'évaluation
- Laboratorio Vaciado TanqueDocument1 pageLaboratorio Vaciado TanquedammaquiPas encore d'évaluation
- Quiz 2 Robotics BEE 7B 11112023 063612pmDocument2 pagesQuiz 2 Robotics BEE 7B 11112023 063612pmAHSAN HAMEEDPas encore d'évaluation
- BioMEMS Sheet2 ADocument7 pagesBioMEMS Sheet2 Atracywst0123Pas encore d'évaluation
- Homework #8, Sec 12.3 and 13.1Document8 pagesHomework #8, Sec 12.3 and 13.1Masaya Sato100% (3)
- Zadaci S DeterminantamaDocument1 pageZadaci S Determinantamamrki357Pas encore d'évaluation
- HW4 SolutionDocument10 pagesHW4 SolutionLê QuânPas encore d'évaluation
- PMT3114 Assignment No.2Document7 pagesPMT3114 Assignment No.2Hussam Eldein EltayebPas encore d'évaluation
- 05-Inverse Manipulator Kinematics: Doan The ThaoDocument47 pages05-Inverse Manipulator Kinematics: Doan The ThaoThảo DươngPas encore d'évaluation
- MathDocument4 pagesMathTanish PithawalaPas encore d'évaluation
- ρ dρ n∅d∅dθDocument4 pagesρ dρ n∅d∅dθPhanikumar ThammisettiPas encore d'évaluation
- Ejercicio 1 Practica 2 1-2020Document14 pagesEjercicio 1 Practica 2 1-2020BRAYAN MAGNE CACERESPas encore d'évaluation
- Robótica de Manipuladores: ProblemsDocument6 pagesRobótica de Manipuladores: ProblemsAldo ParedesPas encore d'évaluation
- Answer To Ques 5&6 - Quantitative Techniques BB0010Document3 pagesAnswer To Ques 5&6 - Quantitative Techniques BB0010Thomas Mosby JamesPas encore d'évaluation
- Tema Dinamica Robotilor IndustrialiDocument14 pagesTema Dinamica Robotilor IndustrialiAndrei SoarePas encore d'évaluation
- Tutorial Week 2 SolutionsDocument2 pagesTutorial Week 2 SolutionsQuazar001Pas encore d'évaluation
- Solution Quiz 2 Robotics BEE 7B 11112023 063647pmDocument1 pageSolution Quiz 2 Robotics BEE 7B 11112023 063647pmAHSAN HAMEEDPas encore d'évaluation
- Example 1 - FlexibilityDocument7 pagesExample 1 - Flexibilityarokia samyPas encore d'évaluation
- Lecture 11Document7 pagesLecture 11Muhammad UmairPas encore d'évaluation
- Mata22 Problem SetDocument8 pagesMata22 Problem Setjbob15267Pas encore d'évaluation
- Module 7 Linear Programming The Simplex Method AnswersDocument27 pagesModule 7 Linear Programming The Simplex Method AnswersEdward AroncianoPas encore d'évaluation
- Math Ex 17Document1 pageMath Ex 17Bùi Ngọc Minh ThưPas encore d'évaluation
- Math5335 2016Document4 pagesMath5335 2016Peper12345Pas encore d'évaluation
- Solution To The Tutorial Sheet 4: November 12, 2019: SandeepDocument5 pagesSolution To The Tutorial Sheet 4: November 12, 2019: SandeepAyush SinghPas encore d'évaluation
- 2A6 Linear Programming - Simplex Method - Minimization Case ILLUSTRATIVE 1st FILEDocument21 pages2A6 Linear Programming - Simplex Method - Minimization Case ILLUSTRATIVE 1st FILERenz ArgarinPas encore d'évaluation
- MatricesDocument4 pagesMatricesMelisa CarranzaPas encore d'évaluation
- Gerald Forigua Andrade T00049723 Ing. Mecatronica: C 2 X C 2 yDocument1 pageGerald Forigua Andrade T00049723 Ing. Mecatronica: C 2 X C 2 yLina Stella Forigua AndradePas encore d'évaluation
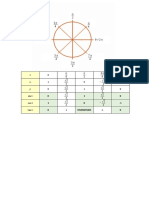
- Trigonometry Ratios: Ѳ Sinѳ Cosѳ Tanѳ Cosecѳ Secѳ Cotѳ 0 0 1 0 Not Defined 1 Not Defined 30 2Document1 pageTrigonometry Ratios: Ѳ Sinѳ Cosѳ Tanѳ Cosecѳ Secѳ Cotѳ 0 0 1 0 Not Defined 1 Not Defined 30 2Dilkhush RajPas encore d'évaluation
- 7 LP Simplex MaximizationDocument18 pages7 LP Simplex MaximizationBrian IgrobayPas encore d'évaluation
- Unit CircleDocument1 pageUnit CirclePibyang C.Pas encore d'évaluation
- Paso 1: Encontrar Los Valores PropiosDocument9 pagesPaso 1: Encontrar Los Valores PropiosJossimar Becerra CorreaPas encore d'évaluation
- Paso 1: Encontrar Los Valores PropiosDocument9 pagesPaso 1: Encontrar Los Valores PropiosJossimar Becerra CorreaPas encore d'évaluation
- Trigonometrice QuationsDocument13 pagesTrigonometrice QuationskhanalirezarazPas encore d'évaluation
- Gumban, Fatima B.?Document15 pagesGumban, Fatima B.?Fatima Gumban100% (1)
- Assignment 3Document5 pagesAssignment 3Kalpit AgarwalPas encore d'évaluation
- Puiaka Puiaka Rey MestyrioDocument28 pagesPuiaka Puiaka Rey MestyrioAmit PaulPas encore d'évaluation
- Evaluación 3 Calculo UTSDocument5 pagesEvaluación 3 Calculo UTScarlos robayoPas encore d'évaluation
- Exercícios Cap 1-6Document25 pagesExercícios Cap 1-6rodrigo.felix17012002Pas encore d'évaluation
- Row Reduced Echelon Form (RREF) ContinuedDocument3 pagesRow Reduced Echelon Form (RREF) ContinuedRAJ MEENAPas encore d'évaluation
- Unit CircleDocument4 pagesUnit CircleAngeli MercedPas encore d'évaluation
- MAST10008 Accelerated Mathematics 1: R R +2R R R +3R R R +RDocument1 pageMAST10008 Accelerated Mathematics 1: R R +2R R R +3R R R +RCindy DingPas encore d'évaluation
- Solutions HW5 PDFDocument12 pagesSolutions HW5 PDFgordanPas encore d'évaluation
- Tut 02Document1 pageTut 02Cindy DingPas encore d'évaluation
- Final ReportDocument5 pagesFinal Report老王Pas encore d'évaluation
- Assignment 5Document3 pagesAssignment 5VISHVENDRA CHAUHANPas encore d'évaluation
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesD'EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesÉvaluation : 1.5 sur 5 étoiles1.5/5 (2)
- Lightweight Mechatronics Design: An Integrated ApproachDocument10 pagesLightweight Mechatronics Design: An Integrated ApproachAsdewq LocoPas encore d'évaluation
- A Robust Approach To Stabilization of 2-DOF Underactuated Mechanical SystemsDocument18 pagesA Robust Approach To Stabilization of 2-DOF Underactuated Mechanical SystemsAsdewq LocoPas encore d'évaluation
- Bond Graph Modeling of A Jet Engine With Electric Starter: Morteza Montazeri-Gh and Seyed Alireza Miran FashandiDocument18 pagesBond Graph Modeling of A Jet Engine With Electric Starter: Morteza Montazeri-Gh and Seyed Alireza Miran FashandiAsdewq LocoPas encore d'évaluation
- Le FrunkenchensexDocument12 pagesLe FrunkenchensexAsdewq LocoPas encore d'évaluation
- Kinematics - 1 PS HWDocument16 pagesKinematics - 1 PS HWSumit AdikanePas encore d'évaluation
- AutoCAD 2D Sample Modules - The CAD GuysDocument61 pagesAutoCAD 2D Sample Modules - The CAD Guysalvin balisbis100% (2)
- Lecture 4.1: Homomorphisms and Isomorphisms: Matthew MacauleyDocument13 pagesLecture 4.1: Homomorphisms and Isomorphisms: Matthew Macauleyred 16Pas encore d'évaluation
- Kinematics: Comprehension Type Questions OnDocument5 pagesKinematics: Comprehension Type Questions OnRamesh BadamPas encore d'évaluation
- MensurationDocument143 pagesMensurationshubh9190100% (1)
- Law and HabitsDocument24 pagesLaw and HabitsSuvedhya ReddyPas encore d'évaluation
- Maths 4 Real Net Notesplus: Programme 6 Worksheet 1: Programme QuestionsDocument6 pagesMaths 4 Real Net Notesplus: Programme 6 Worksheet 1: Programme Questionsabdallah65Pas encore d'évaluation
- Performance Tasks in Math 4 Third Quarter: Skai KruDocument8 pagesPerformance Tasks in Math 4 Third Quarter: Skai Krumichelle milleondagaPas encore d'évaluation
- Circle, Cube, and CuboidsDocument27 pagesCircle, Cube, and CuboidsYohanes DhikaPas encore d'évaluation
- The Ethics of The Cosmos: DeclarationDocument3 pagesThe Ethics of The Cosmos: DeclarationH.I.M Dr. Lawiy ZodokPas encore d'évaluation
- Aero 5Document38 pagesAero 5Havner Scherrer CruzPas encore d'évaluation
- Stress6 ht08 2Document26 pagesStress6 ht08 2fredrikalloPas encore d'évaluation
- TEORIA DE LA FILOSOFIA NATURAL, Boscovich R. J.Document506 pagesTEORIA DE LA FILOSOFIA NATURAL, Boscovich R. J.gustavo_vb100% (2)
- Twins Paradox - Geometry ReviewDocument6 pagesTwins Paradox - Geometry ReviewCristianRiveraPas encore d'évaluation
- 4024 w12 QP 21Document24 pages4024 w12 QP 21Beatrice RossPas encore d'évaluation
- AITMO 20009 Puzzle Contest PoblemDocument4 pagesAITMO 20009 Puzzle Contest PoblemChusak WattanapadungsakPas encore d'évaluation
- Goldstein Classical Mechanics Notes (Michael Good 2004)Document149 pagesGoldstein Classical Mechanics Notes (Michael Good 2004)Karan Gupta100% (1)
- Chapter 9Document52 pagesChapter 9Navian NadeemPas encore d'évaluation
- T Are A Potencial Electrico 2016Document4 pagesT Are A Potencial Electrico 2016Servando De La CruzPas encore d'évaluation
- Circular Measures PDFDocument12 pagesCircular Measures PDFkslew14100% (2)
- ML Geometry 8-7 DilationsDocument8 pagesML Geometry 8-7 Dilationsashish663Pas encore d'évaluation
- The Accuracy of Using Theodolite in Close-Range Engineering MeasurementsDocument8 pagesThe Accuracy of Using Theodolite in Close-Range Engineering MeasurementsSony ZebuaPas encore d'évaluation
- MCQ Class ViiiDocument29 pagesMCQ Class ViiiLinnet BhagyarajPas encore d'évaluation
- 07MA6005 Mathematical Methods in Structural Engineering DEC 2015Document3 pages07MA6005 Mathematical Methods in Structural Engineering DEC 2015tirursachinPas encore d'évaluation
- Engineering MathDocument29 pagesEngineering Mathairies92Pas encore d'évaluation
- Cec 106 Theory - Strength of MaterialsDocument77 pagesCec 106 Theory - Strength of MaterialsVietHungCao79% (14)
- Functional Gage and Fixture DesignDocument8 pagesFunctional Gage and Fixture DesignAnonymous 7ZTcBn0% (1)
- 9a03101a Engineering DrawingDocument4 pages9a03101a Engineering DrawingsivabharathamurthyPas encore d'évaluation
- Simmel StrangerDocument3 pagesSimmel StrangermerveozgurPas encore d'évaluation
- Space ResectionDocument10 pagesSpace ResectionFreddy Doni Hutson PanePas encore d'évaluation