Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Transistor D1406-SavantICDocument4 pagesTransistor D1406-SavantICEdgar MartinezPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Configuration A: Unloaded BJT Transistor AmplifiersDocument3 pagesConfiguration A: Unloaded BJT Transistor AmplifiersVincent Emmanuel SalibioPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- TL431 Family: 1. Product ProfileDocument19 pagesTL431 Family: 1. Product ProfilediegooliveiraEEPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Exp 8 - Common Base AmplifierDocument3 pagesExp 8 - Common Base AmplifierHatem DheerPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- LSU EE 3755 - Fall 2012 - Computer Organization Verilog Notes 4 - Synthesis Under ConstructionDocument20 pagesLSU EE 3755 - Fall 2012 - Computer Organization Verilog Notes 4 - Synthesis Under ConstructionMerupu DebbaPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Multiplexers: LAB No. 6Document5 pagesMultiplexers: LAB No. 6Cristina GrohPas encore d'évaluation
- Combinational CircuitDocument15 pagesCombinational CircuitTanmay HazraPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Unit 3 - Week 2: Assignment 2Document7 pagesUnit 3 - Week 2: Assignment 2ANITHA MPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- EE 503 Project 1:buck Converter: I Background: II: RequirementDocument7 pagesEE 503 Project 1:buck Converter: I Background: II: Requirementapi-626683514Pas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- 1 - Integer-N Frequency SynthesizersDocument101 pages1 - Integer-N Frequency SynthesizersAhmed ShafeekPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- ECA Comprehensive Bits (2019-20) R18 AutonomousDocument7 pagesECA Comprehensive Bits (2019-20) R18 AutonomousECE G Rama RaoPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
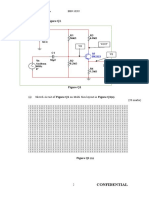
- Confidential: Refer To Figure Q1Document3 pagesConfidential: Refer To Figure Q1Zhamir ZhakwanPas encore d'évaluation
- INA139 INA169: Features DescriptionDocument15 pagesINA139 INA169: Features DescriptionLeo RodriguesPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Amplifier Classes and The Classification of Amplifiers PDFDocument10 pagesAmplifier Classes and The Classification of Amplifiers PDFpawanPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Unit 13 - Week 11: Assignment 11Document5 pagesUnit 13 - Week 11: Assignment 11FerekkanPas encore d'évaluation
- Unit 3 Short Answer Questions BJTDocument3 pagesUnit 3 Short Answer Questions BJTJSSPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Circuit Theory: First-Order CircuitsDocument22 pagesCircuit Theory: First-Order Circuitsmalek992Pas encore d'évaluation
- Counter, Shifts and DecoderDocument20 pagesCounter, Shifts and DecoderLuís Ki-llahPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- 1.8V, 11 Output Clock Multiplier, Distributor, Jitter Cleaner, and BufferDocument29 pages1.8V, 11 Output Clock Multiplier, Distributor, Jitter Cleaner, and BuffersunilsheelavantPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Multi Demul 4053Document7 pagesMulti Demul 4053Edward RinconPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
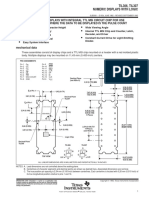
- TIL306, TIL307 Numeric Displays With LogicDocument9 pagesTIL306, TIL307 Numeric Displays With LogicNadjPas encore d'évaluation
- Description Features: PT2399 Echo Processor ICDocument9 pagesDescription Features: PT2399 Echo Processor ICsrinitce_mePas encore d'évaluation
- Experiment # Aim: The Objective of This Experiment Is To Study A 950nm-Fiber Analog Link of An Analog Signal and Audio Signal. Apparatus RequiredDocument2 pagesExperiment # Aim: The Objective of This Experiment Is To Study A 950nm-Fiber Analog Link of An Analog Signal and Audio Signal. Apparatus RequiredKakaPas encore d'évaluation
- T-Flip FlopDocument3 pagesT-Flip FlopSachin JunejaPas encore d'évaluation
- Coupling & DecouplingDocument12 pagesCoupling & DecouplingCezanne Cruz100% (1)
- Tutorial Sheet - 1 2020Document1 pageTutorial Sheet - 1 2020guddu guptaPas encore d'évaluation
- Experiment No 1: Wiring of RC Coupled Single Stage AmplifierDocument7 pagesExperiment No 1: Wiring of RC Coupled Single Stage AmplifierShweta GadgayPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- EC8461 - EC II Lab ManualDocument90 pagesEC8461 - EC II Lab ManualKarm Pdk50% (2)
- Negative Setup and Hold TimesDocument2 pagesNegative Setup and Hold TimesAman AroraPas encore d'évaluation
- Metso LCU1Document96 pagesMetso LCU1Tứ Hồ QuốcPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)