Vous aimerez peut-être aussi
- Holonomic Implementation of Three Wheels Omnidirectional Mobile Robot Using DC MotorsDocument7 pagesHolonomic Implementation of Three Wheels Omnidirectional Mobile Robot Using DC MotorsVinay PatilPas encore d'évaluation
- The Kinematics Model of A Two-Wheeled Self-Balancing RobotDocument5 pagesThe Kinematics Model of A Two-Wheeled Self-Balancing RobotJason ArensPas encore d'évaluation
- 32423-Article Text-33991-1-10-20190711Document7 pages32423-Article Text-33991-1-10-20190711aliPas encore d'évaluation
- Differential Drive RobotDocument5 pagesDifferential Drive RobotYaveesh Yav OPas encore d'évaluation
- Dynamic Mobile Robot Paper 1Document6 pagesDynamic Mobile Robot Paper 1pgamasterPas encore d'évaluation
- Position Control of a Mobile Robot Through PID ConDocument7 pagesPosition Control of a Mobile Robot Through PID ConTuan Anh HoangPas encore d'évaluation
- 62 22 1 PBDocument8 pages62 22 1 PBmaria graça dias portas automáticas ldaPas encore d'évaluation
- Kinematic Modeling of Quadruped RobotDocument6 pagesKinematic Modeling of Quadruped Robotnilesh_092Pas encore d'évaluation
- Speed Control System in Mobile Robot Based On BeziDocument11 pagesSpeed Control System in Mobile Robot Based On BeziChiha WissemPas encore d'évaluation
- Chapter 12, Mobile RobotDocument17 pagesChapter 12, Mobile RobotAkram AlsadeqPas encore d'évaluation
- Dynamic Modeling and Centralized Formation Control of Mobile RobotsDocument6 pagesDynamic Modeling and Centralized Formation Control of Mobile RobotsYassine RabhiPas encore d'évaluation
- Automation and RoboticsDocument20 pagesAutomation and Roboticskbragkiros75Pas encore d'évaluation
- Airo V1i 20Document19 pagesAiro V1i 20Khoa NguyễnPas encore d'évaluation
- Curvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaDocument6 pagesCurvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaRavi RanjanPas encore d'évaluation
- Self Balancing With Pid ControlDocument7 pagesSelf Balancing With Pid Controlengrumar100% (1)
- 1 s2.0 S2212017316301839 MainDocument8 pages1 s2.0 S2212017316301839 Mainmaria graça dias portas automáticas ldaPas encore d'évaluation
- Chapter 1 - Review Mobile Robot KinematicsDocument23 pagesChapter 1 - Review Mobile Robot KinematicshotrantendatPas encore d'évaluation
- Android Controlled Robot LiteratureDocument13 pagesAndroid Controlled Robot LiteratureSai Som MeinPas encore d'évaluation
- Quadruped robot stabilization on uneven floors using IMUDocument6 pagesQuadruped robot stabilization on uneven floors using IMUfarlockPas encore d'évaluation
- NavigationDocument17 pagesNavigationQuan NguyenPas encore d'évaluation
- Design of Rescue Robot with Tri-Star WheelDocument5 pagesDesign of Rescue Robot with Tri-Star WheelMonica TangPas encore d'évaluation
- Design LocomotionDocument36 pagesDesign LocomotionsherlockmsPas encore d'évaluation
- Abid RobotDocument10 pagesAbid RobotHAFEDH ABIDPas encore d'évaluation
- FasfasDocument8 pagesFasfasRifqi FirlianPas encore d'évaluation
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorCarlos Rodriguez RPas encore d'évaluation
- EC7010: Autonomous Mobile Robots and Robot IntelligenceDocument44 pagesEC7010: Autonomous Mobile Robots and Robot Intelligencebooks sanPas encore d'évaluation
- Multi-robot formation control for outdoor environmentsDocument9 pagesMulti-robot formation control for outdoor environmentsDaudPas encore d'évaluation
- Real-Time Control Schemes For Mirosot: Jong-Hwan Kim, Kwang-Choon Kim, Dong-Han Kim, Yong-Jae Kim and Prahlad VadakkepatDocument6 pagesReal-Time Control Schemes For Mirosot: Jong-Hwan Kim, Kwang-Choon Kim, Dong-Han Kim, Yong-Jae Kim and Prahlad VadakkepatrussellinPas encore d'évaluation
- Robotics: Trajectory Planning and Tracking Control of A Differential-Drive Mobile Robot in A Picture Drawing ApplicationDocument15 pagesRobotics: Trajectory Planning and Tracking Control of A Differential-Drive Mobile Robot in A Picture Drawing ApplicationMinh CaoPas encore d'évaluation
- Simulation of LQR For TWSBRDocument5 pagesSimulation of LQR For TWSBRGonzalo CurielPas encore d'évaluation
- Inverse Kinematics Analysis For Motion Prediction of A Hexapod RobotDocument5 pagesInverse Kinematics Analysis For Motion Prediction of A Hexapod Robotdidi sronggotPas encore d'évaluation
- Trajectory Planning and Control of One-Legged Hopping Robot at Thrusting PhaseDocument8 pagesTrajectory Planning and Control of One-Legged Hopping Robot at Thrusting PhaseAlina MirelaPas encore d'évaluation
- Assignment 1 - System Engineering - Neural Network Based Path Planning For Mecanum Wheeled Omni Directional RobotDocument12 pagesAssignment 1 - System Engineering - Neural Network Based Path Planning For Mecanum Wheeled Omni Directional RobotRizky DsPas encore d'évaluation
- Feedforward Control System Development and Implementation For Longitudinal and Lateral Motion of A Four-Wheeled RobotDocument19 pagesFeedforward Control System Development and Implementation For Longitudinal and Lateral Motion of A Four-Wheeled RobotAnonymous lVQ83F8mCPas encore d'évaluation
- Fundamentals of Industrial Robot AnatomyDocument22 pagesFundamentals of Industrial Robot AnatomyN BHUSHANPas encore d'évaluation
- 06 - Kinematics PDFDocument60 pages06 - Kinematics PDFFiriz FarizPas encore d'évaluation
- journal-Observer-Based Adaptive Tracking Control ofDocument10 pagesjournal-Observer-Based Adaptive Tracking Control ofPham ThuanPas encore d'évaluation
- Self Balancing Two-Wheel LocomotiveDocument55 pagesSelf Balancing Two-Wheel LocomotiveSujay PawarPas encore d'évaluation
- Mobile robot kinematics and localizationDocument4 pagesMobile robot kinematics and localizationLediana BrahimiPas encore d'évaluation
- Chapter 3 Autonomous Robot - KinematicsDocument35 pagesChapter 3 Autonomous Robot - KinematicsHoang Anh Nguyen QuocPas encore d'évaluation
- TM 03 Fungsi, Komponen Dasar Dan KinematikaDocument50 pagesTM 03 Fungsi, Komponen Dasar Dan KinematikaM FebriansyahPas encore d'évaluation
- A Motion ControlDocument6 pagesA Motion ControlRonald CaravacaPas encore d'évaluation
- The Mathematical Model and Simulation of A QuadrupDocument8 pagesThe Mathematical Model and Simulation of A QuadrupTiến Trần XuânPas encore d'évaluation
- Modeling and Design of Longitudinal and Lateral Control System With A Feed Forward Controller For A 4 Wheeled RobotDocument18 pagesModeling and Design of Longitudinal and Lateral Control System With A Feed Forward Controller For A 4 Wheeled RobotJames MorenoPas encore d'évaluation
- Ijser: Modeling and Simulation of A Differential Drive Mobile RobotDocument6 pagesIjser: Modeling and Simulation of A Differential Drive Mobile Robothamza malikPas encore d'évaluation
- Meng 2011Document6 pagesMeng 2011Rodrigo Murillo ArandaPas encore d'évaluation
- Lab ManualDocument9 pagesLab ManualSahil KokitkarPas encore d'évaluation
- Lecture 3 Introduction To RoboticsDocument13 pagesLecture 3 Introduction To RoboticsDomjul KumzhiPas encore d'évaluation
- Chapter 2 - Robot KinematicsDocument35 pagesChapter 2 - Robot KinematicsShitnu SuwanPas encore d'évaluation
- Robotics TheoryDocument13 pagesRobotics TheorymahrusPas encore d'évaluation
- Different Kinematic Path Following Controllers For A Wheeled Mobile Robot of (2,0) TypeDocument18 pagesDifferent Kinematic Path Following Controllers For A Wheeled Mobile Robot of (2,0) TypemonikPas encore d'évaluation
- Trajectory Generation Experimental Results of A Single Traction Ball Mobile RobotDocument6 pagesTrajectory Generation Experimental Results of A Single Traction Ball Mobile RobotJosé Luis BohórquezPas encore d'évaluation
- Differential-Drive Mobile Robot Control Design BasDocument8 pagesDifferential-Drive Mobile Robot Control Design Basmaria graça dias portas automáticas ldaPas encore d'évaluation
- Assessment Criteria For Mid-Term Assessment TEQIP-III Technology Robotics and AutomationDocument30 pagesAssessment Criteria For Mid-Term Assessment TEQIP-III Technology Robotics and Automationdjadja nakamayaPas encore d'évaluation
- 1 Differential Drive KinematicsDocument8 pages1 Differential Drive Kinematicsindo spicePas encore d'évaluation
- Murcia 2018Document11 pagesMurcia 2018Nguyễn Khải ÂnPas encore d'évaluation
- Modeling and Control of 2-DOF Robot ArmDocument8 pagesModeling and Control of 2-DOF Robot ArmOtter OttersPas encore d'évaluation
- Robot Manipulators: Modeling, Performance Analysis and ControlD'EverandRobot Manipulators: Modeling, Performance Analysis and ControlPas encore d'évaluation
- 10.1016@j.jhazmat.2007.11.123 2Document13 pages10.1016@j.jhazmat.2007.11.123 2Naufal RachmatullahPas encore d'évaluation
- The Tools Used To Analyze The Result of Filtration Are PH MeterDocument1 pageThe Tools Used To Analyze The Result of Filtration Are PH MeterNaufal RachmatullahPas encore d'évaluation
- Introducing Dung Beetles to PasturesDocument3 pagesIntroducing Dung Beetles to PasturesdarylPas encore d'évaluation
- Test Score Descriptors ExamDocument3 pagesTest Score Descriptors ExamNaufal RachmatullahPas encore d'évaluation
- Publikasi 09.11.3201Document17 pagesPublikasi 09.11.3201Naufal RachmatullahPas encore d'évaluation
- Chapter 01 - IntroductionDocument16 pagesChapter 01 - IntroductionBùi ChungPas encore d'évaluation
- Compound-Complex Sentence Notes PDFDocument1 pageCompound-Complex Sentence Notes PDFNaufal RachmatullahPas encore d'évaluation
- Chemical Reaction EngineeringDocument37 pagesChemical Reaction EngineeringNaufal RachmatullahPas encore d'évaluation
- Package Lat2Document3 pagesPackage Lat2Naufal RachmatullahPas encore d'évaluation
- Tips For Success On Job InterviewDocument9 pagesTips For Success On Job InterviewNaufal RachmatullahPas encore d'évaluation
- Personalized Text Summarization Based On Important Terms IdentificationDocument5 pagesPersonalized Text Summarization Based On Important Terms IdentificationNaufal RachmatullahPas encore d'évaluation
- Lesson Modifier ProblemsDocument10 pagesLesson Modifier ProblemsNaufal RachmatullahPas encore d'évaluation
- Axial Shortening of Column in Tall Structure.Document9 pagesAxial Shortening of Column in Tall Structure.P.K.Mallick100% (1)
- DC Motor Direction Control ReportDocument6 pagesDC Motor Direction Control ReportEngr Farhanullah SarkiPas encore d'évaluation
- Study of Step Up & Step Down Transformer: Experiment 9Document3 pagesStudy of Step Up & Step Down Transformer: Experiment 9Apna VeerPas encore d'évaluation
- 0.9PF PW 380v 3phase HF UPS10-120kvaDocument8 pages0.9PF PW 380v 3phase HF UPS10-120kvaArmandinho CaveroPas encore d'évaluation
- Prepositions-Of-place Worksheet Azucena SalasDocument3 pagesPrepositions-Of-place Worksheet Azucena SalasAndreia SimõesPas encore d'évaluation
- Report On Corporate Communication Strategy Analysis ofDocument38 pagesReport On Corporate Communication Strategy Analysis ofNAFISA ISLAMPas encore d'évaluation
- Conveyor Chain GuideDocument59 pagesConveyor Chain GuideajaykrishnaaPas encore d'évaluation
- Assessment of Groundwater Quality Using GIS - A Case Study of The Churu District of RajasthanDocument9 pagesAssessment of Groundwater Quality Using GIS - A Case Study of The Churu District of RajasthanSivaShankarPas encore d'évaluation
- Astm D-2361Document4 pagesAstm D-2361Claudia Da Rolt0% (1)
- Power Plant Engineering by G.R.nagpalDocument729 pagesPower Plant Engineering by G.R.nagpalGoutham Peri74% (23)
- 13-2021مواصفات الفنية لقطع غيار المكيفاتDocument4 pages13-2021مواصفات الفنية لقطع غيار المكيفاتTawfeeq Al-HababbiPas encore d'évaluation
- Scrap NFL PanipatDocument9 pagesScrap NFL PanipatJitenderSinghPas encore d'évaluation
- LR Phono PreampsDocument44 pagesLR Phono PreampsMartin FernandezPas encore d'évaluation
- Infantry WeaponsDocument61 pagesInfantry WeaponsKaran SahotaPas encore d'évaluation
- Automotive Control SystemsDocument406 pagesAutomotive Control SystemsDenis Martins Dantas100% (3)
- 3095MV Calibration Procedure W QuickCal Merian 4010Document8 pages3095MV Calibration Procedure W QuickCal Merian 4010luisalbertopumaPas encore d'évaluation
- Daily DAWN News Vocabulary With Urdu Meaning (05 April 2020) PDFDocument6 pagesDaily DAWN News Vocabulary With Urdu Meaning (05 April 2020) PDFAEO Begowala100% (2)
- An70983 001-70983Document24 pagesAn70983 001-70983अमरेश झाPas encore d'évaluation
- Stereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010Document50 pagesStereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010ththaalPas encore d'évaluation
- Advances in Remediation-eBookDocument88 pagesAdvances in Remediation-eBookalinerlfPas encore d'évaluation
- CISO Core Proficiency Prepared by Chintan GurjarDocument1 pageCISO Core Proficiency Prepared by Chintan GurjarDerpPas encore d'évaluation
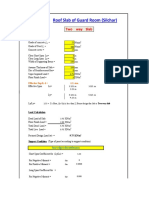
- Roof Slab of Guard RoomDocument3 pagesRoof Slab of Guard RoomAditya KumarPas encore d'évaluation
- Unban FormsDocument74 pagesUnban FormsNoob ab AbPas encore d'évaluation
- bbk-lt2614-lt3214 Service Manual PDFDocument42 pagesbbk-lt2614-lt3214 Service Manual PDFrj arcinasPas encore d'évaluation
- Prefabricated Structures ComponentsDocument16 pagesPrefabricated Structures ComponentsKrish KrishPas encore d'évaluation
- Rising Stem Ball ValveDocument6 pagesRising Stem Ball ValveAnupam A. GandhewarPas encore d'évaluation
- PV Design WorksheetDocument4 pagesPV Design WorksheetLarry Walker II100% (1)
- MTBE Presintation For IMCODocument26 pagesMTBE Presintation For IMCOMaryam AlqasimyPas encore d'évaluation
- FC Vs FBDocument8 pagesFC Vs FBMiguel SanchesPas encore d'évaluation