Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- PML Manual PDFDocument178 pagesPML Manual PDFChandrashekar R100% (1)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Hot Mix AsphaltDocument38 pagesHot Mix Asphaltmarinex_84Pas encore d'évaluation
- Plate Tests On Gravels Ortigosa Retamal, Musante, 1987)Document13 pagesPlate Tests On Gravels Ortigosa Retamal, Musante, 1987)marinex_84Pas encore d'évaluation
- Wiki SpeedDocument5 pagesWiki Speedprashanthfeb90100% (1)
- Seismic Chilean Damges LicuefactionDocument12 pagesSeismic Chilean Damges Licuefactionmarinex_84Pas encore d'évaluation
- 3 Bray Liquefaction Peru NOV2014Document48 pages3 Bray Liquefaction Peru NOV2014marinex_84Pas encore d'évaluation
- Early CrackingDocument131 pagesEarly Crackingmarinex_84Pas encore d'évaluation
- 98-0005 Screening Guide For Rapid Assessment of Liquefaction Hazard at Highway Bridge SitesDocument76 pages98-0005 Screening Guide For Rapid Assessment of Liquefaction Hazard at Highway Bridge Sitesmarinex_84Pas encore d'évaluation
- 532 1Document42 pages532 1Rup JoshiPas encore d'évaluation
- FinalReportDocument93 pagesFinalReportmarinex_84Pas encore d'évaluation
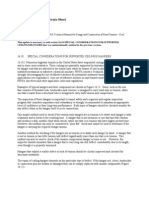
- GDM Ch-14 Ground ImprovementDocument112 pagesGDM Ch-14 Ground Improvementmarinex_84Pas encore d'évaluation
- Investigation of Methods To Produce Regional Maps of LiquefactionDocument61 pagesInvestigation of Methods To Produce Regional Maps of Liquefactionmarinex_84Pas encore d'évaluation
- Tunnel ManualDocument704 pagesTunnel ManualGianMaria Zucchini100% (3)
- Performance Comparison of Pavement Rehabilitation StrategiesDocument4 pagesPerformance Comparison of Pavement Rehabilitation Strategiesmarinex_84Pas encore d'évaluation
- Astm D 4945 - 08Document10 pagesAstm D 4945 - 08Iputu DwiastaPas encore d'évaluation
- ACEMDocument21 pagesACEMvahap_samanli4102Pas encore d'évaluation
- Fatigue of PavementsDocument137 pagesFatigue of Pavementsabdikarim_omarPas encore d'évaluation
- Mechanistic-Empirical DesignDocument22 pagesMechanistic-Empirical DesignGelbert SilotPas encore d'évaluation
- Procedure For Bridge Foundations PILE PEER805Document186 pagesProcedure For Bridge Foundations PILE PEER805Demçe FlorjanPas encore d'évaluation
- PL Case TaiwanDocument8 pagesPL Case Taiwanmarinex_84Pas encore d'évaluation
- BookDocument92 pagesBookmarinex_84Pas encore d'évaluation
- PL Iwasaki y TokimatsuDocument14 pagesPL Iwasaki y Tokimatsumarinex_84Pas encore d'évaluation
- Peer 515 MossDocument74 pagesPeer 515 Mossmarinex_84Pas encore d'évaluation
- PEER807 KRAMERArduino ShinDocument198 pagesPEER807 KRAMERArduino Shinmarinex_84Pas encore d'évaluation
- Liquefaction of Fine Grained SoilsDocument6 pagesLiquefaction of Fine Grained Soilsmarinex_84Pas encore d'évaluation
- Boulanger Et AlDocument12 pagesBoulanger Et Almarinex_84Pas encore d'évaluation
- Techniques For Mitigation of Reflective CracksDocument186 pagesTechniques For Mitigation of Reflective Cracksmarinex_84100% (1)
- EN2711-Lab A-1 (WR) Centre of PressureDocument9 pagesEN2711-Lab A-1 (WR) Centre of PressureVanessa Boey Khai LingPas encore d'évaluation
- Endcarriage - KZL-S 315Document116 pagesEndcarriage - KZL-S 315Josip Nuno CoricPas encore d'évaluation
- Quarter 1 Revision SheetsDocument7 pagesQuarter 1 Revision Sheetsghada kamalPas encore d'évaluation
- Status of Technical Education in India - Emerging Issues and ChallengesDocument11 pagesStatus of Technical Education in India - Emerging Issues and ChallengesSreeram MandaPas encore d'évaluation
- Commodi Cation of Women's Bodies andDocument9 pagesCommodi Cation of Women's Bodies andunesa fikPas encore d'évaluation
- Feminist Philosophy of Religion (Stanford)Document35 pagesFeminist Philosophy of Religion (Stanford)Jagad-Guru DasPas encore d'évaluation
- Remove the first element from a Redis list with LPOPDocument3 pagesRemove the first element from a Redis list with LPOPSantosh KamblePas encore d'évaluation
- Thesis Statement Examples On GovernmentDocument4 pagesThesis Statement Examples On Governmentpuzinasymyf3100% (2)
- Content-Based Image Retrieval System Using SketchesDocument50 pagesContent-Based Image Retrieval System Using SketchesHoney Merrin SamPas encore d'évaluation
- 3rd BeatitudeDocument18 pages3rd BeatitudeDonna APas encore d'évaluation
- ExportDocument361 pagesExportStefanPas encore d'évaluation
- Data Mining Course Learn Analytics RDocument5 pagesData Mining Course Learn Analytics RAntonio AlvarezPas encore d'évaluation
- BHEL Haridwar Block 2 Heavy Fabrication, Training ReportDocument53 pagesBHEL Haridwar Block 2 Heavy Fabrication, Training ReportUdit Soni100% (5)
- Overqualified Cover LetterDocument4 pagesOverqualified Cover Letteroyutlormd100% (1)
- L o N G e V I T y NotesDocument24 pagesL o N G e V I T y NotesRajeswara Rao NidasanametlaPas encore d'évaluation
- Total Productive MaintenanceDocument41 pagesTotal Productive Maintenancejeff090288Pas encore d'évaluation
- GC Catalogue 2015 - 2017Document104 pagesGC Catalogue 2015 - 2017Джи СиPas encore d'évaluation
- NCERT Solutions For Class 7 English Supplementary Chapter 10 An Alien HandDocument2 pagesNCERT Solutions For Class 7 English Supplementary Chapter 10 An Alien HandMubeena TayyabiPas encore d'évaluation
- 4 5800845248737314443 PDFDocument457 pages4 5800845248737314443 PDFNirankar SinghPas encore d'évaluation
- Bhaskar Agarwal CVDocument1 pageBhaskar Agarwal CVbhaskaraglPas encore d'évaluation
- Seance 1 Introduction To DystopiaDocument32 pagesSeance 1 Introduction To DystopiaHanane AmadouPas encore d'évaluation
- Cisco Callmanager Attendant ConsoleDocument28 pagesCisco Callmanager Attendant ConsoleLuciano Esteban GaetePas encore d'évaluation
- 9-Nietzsche and Super LaughterDocument18 pages9-Nietzsche and Super Laughtergannoa02Pas encore d'évaluation
- Housekeeping & Etiquette BibliographyDocument92 pagesHousekeeping & Etiquette BibliographyDouglas CavalheiroPas encore d'évaluation
- FTT - en 45545 EU Railway Industry 2015 - CompressedDocument24 pagesFTT - en 45545 EU Railway Industry 2015 - Compresseddody andiPas encore d'évaluation
- Muhamad Azamudin ResumeDocument1 pageMuhamad Azamudin ResumeMuhamad AzamudinPas encore d'évaluation
- Ifw Process GimDocument24 pagesIfw Process Gimmyownhminbox485Pas encore d'évaluation