Vous aimerez peut-être aussi
- Electrical Power Plans For Building ConstructionDocument16 pagesElectrical Power Plans For Building ConstructionKitz DerechoPas encore d'évaluation
- Theory and Computation of Tensors: Multi-Dimensional ArraysD'EverandTheory and Computation of Tensors: Multi-Dimensional ArraysPas encore d'évaluation
- Anritsu Understanding OtdrsDocument60 pagesAnritsu Understanding OtdrsMathieu Bolle100% (3)
- L27jvpzoz yDocument17 pagesL27jvpzoz yBastian DewiPas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec02 - 300k-mp4: ProfessorDocument22 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec02 - 300k-mp4: ProfessorAhmed EwisPas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec13 - 300k-mp4: ProfessorDocument17 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec13 - 300k-mp4: ProfessorBastian DewiPas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorDocument16 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorBastian DewiPas encore d'évaluation
- MITOCW - MITRES2 - 002s10linear - Lec10 - 300k-mp4: ProfessorDocument21 pagesMITOCW - MITRES2 - 002s10linear - Lec10 - 300k-mp4: ProfessorDanielPas encore d'évaluation
- gzG2p Su8Vw PDFDocument21 pagesgzG2p Su8Vw PDFLuqman Al HakimPas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorDocument24 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorBastian DewiPas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec09 - 300k-mp4: ProfessorDocument13 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec09 - 300k-mp4: ProfessorBastian DewiPas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorDocument15 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorBastian DewiPas encore d'évaluation
- MITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDocument21 pagesMITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDanielPas encore d'évaluation
- (Massachusetts Institute of Technology: Mit Opencourseware)Document9 pages(Massachusetts Institute of Technology: Mit Opencourseware)Igor CamposPas encore d'évaluation
- Instructor (Stephen Boyd) :great. It Looks Like We're On. Let Me Make A Couple ofDocument23 pagesInstructor (Stephen Boyd) :great. It Looks Like We're On. Let Me Make A Couple ofJagritiKumariPas encore d'évaluation
- 3fe0cc8ce9bb9a219tyutytutuytuff030a880619abc SioXozu-LooDocument13 pages3fe0cc8ce9bb9a219tyutytutuytuff030a880619abc SioXozu-LooBild LucaPas encore d'évaluation
- Lec 39Document20 pagesLec 39tamizhanPas encore d'évaluation
- Calculus I - Related RatesDocument15 pagesCalculus I - Related Rateswag2325Pas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec08 - 300k-mp4: ProfessorDocument12 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec08 - 300k-mp4: ProfessorFelipe Dornellas SilvaPas encore d'évaluation
- Instructor (Brad Osgood) :are We On? I Can't See. It Looks Kinda Dark. I Don't Know. ItDocument12 pagesInstructor (Brad Osgood) :are We On? I Can't See. It Looks Kinda Dark. I Don't Know. ItElisée NdjabuPas encore d'évaluation
- Lec 8Document39 pagesLec 8GooftilaaAniJiraachuunkooYesusiinPas encore d'évaluation
- MITOCW - MITRES2 - 002s10linear - Lec07 - 300k-mp4: ProfessorDocument17 pagesMITOCW - MITRES2 - 002s10linear - Lec07 - 300k-mp4: ProfessorZaryan IjazPas encore d'évaluation
- Lec 22Document28 pagesLec 22Shreyas Gupta 4-Yr B.Tech. Chemical Engg., IIT (BHU) VaranasiPas encore d'évaluation
- Structural DynamicsDocument16 pagesStructural DynamicsSushanta Kumar RoyPas encore d'évaluation
- MITOCW - 4. Movement of A Particle in Circular Motion W/ Polar CoordinatesDocument18 pagesMITOCW - 4. Movement of A Particle in Circular Motion W/ Polar CoordinatesRogerioPas encore d'évaluation
- 2fd24e5b7jhgjhggf0779037b0aa0d217f82776 MdzfsfBNJIwDocument17 pages2fd24e5b7jhgjhggf0779037b0aa0d217f82776 MdzfsfBNJIwBild LucaPas encore d'évaluation
- MITOCW - 19. Introduction To Mechanical VibrationDocument20 pagesMITOCW - 19. Introduction To Mechanical VibrationCristian AnghelPas encore d'évaluation
- PKM K Usaha Jamur Crispy KriukDocument17 pagesPKM K Usaha Jamur Crispy Kriukraihan riadhyPas encore d'évaluation
- MITOCW - MITRES2 - 002s10linear - Lec08 - 300k-mp4: ProfessorDocument16 pagesMITOCW - MITRES2 - 002s10linear - Lec08 - 300k-mp4: ProfessorDanielPas encore d'évaluation
- Linear System Modeling A Single Degree of Freedom OscillatorDocument23 pagesLinear System Modeling A Single Degree of Freedom OscillatorCristian AnghelPas encore d'évaluation
- Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1Document19 pagesStructural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1vkagarwaPas encore d'évaluation
- Lec14 PDFDocument21 pagesLec14 PDFAbhishek AroraPas encore d'évaluation
- Computational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyDocument31 pagesComputational Fluid Dynamics, NPTEL Lecture 42 by Suman ChakraborthyShubhankar Gurav 16210094Pas encore d'évaluation
- Lec 1Document22 pagesLec 1दीपक सिंहPas encore d'évaluation
- Lec34 PDFDocument28 pagesLec34 PDFmb5bariyaPas encore d'évaluation
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Document19 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4abimanaPas encore d'évaluation
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14mahendranPas encore d'évaluation
- MITOCW - MITRES2 - 002s10linear - Lec12 - 300k-mp4: ProfessorDocument21 pagesMITOCW - MITRES2 - 002s10linear - Lec12 - 300k-mp4: ProfessorDanielPas encore d'évaluation
- 07 09 P3-EnDocument3 pages07 09 P3-EnBenPas encore d'évaluation
- MITOCW - MITRES2 - 002s10linear - Lec05 - 300k-mp4: ProfessorDocument20 pagesMITOCW - MITRES2 - 002s10linear - Lec05 - 300k-mp4: ProfessorDanielPas encore d'évaluation
- MITOCW - MITRES2 - 002s10linear - Lec06 - 300k-mp4: ProfessorDocument17 pagesMITOCW - MITRES2 - 002s10linear - Lec06 - 300k-mp4: ProfessorDanielPas encore d'évaluation
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocument12 pagesMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesPas encore d'évaluation
- Instructor (Brad Osgood) :oh, I'm On. What A Surprise. All Right. Did You Get The WordDocument12 pagesInstructor (Brad Osgood) :oh, I'm On. What A Surprise. All Right. Did You Get The WordNi PeterPas encore d'évaluation
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15mahendranPas encore d'évaluation
- V P-O RQqmeg 4Document18 pagesV P-O RQqmeg 4Bild LucaPas encore d'évaluation
- MITOCW - Ocw-18-01-F07-Lec15 - 300k: ProfessorDocument9 pagesMITOCW - Ocw-18-01-F07-Lec15 - 300k: Professornk4everPas encore d'évaluation
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranPas encore d'évaluation
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument24 pagesEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasAbhishek AroraPas encore d'évaluation
- Dynamic Response For Continuous SystemsDocument18 pagesDynamic Response For Continuous SystemsDarsHan MoHan0% (1)
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaPas encore d'évaluation
- Z Xyx-Z6arcDocument21 pagesZ Xyx-Z6arckoitaabdoulaye12.maPas encore d'évaluation
- Mitocw - Watch?V Wpseyjx1-4SDocument17 pagesMitocw - Watch?V Wpseyjx1-4SJosue BeckerPas encore d'évaluation
- MITOCW - MITRES2 - 002s10linear - Lec03 - 300k-mp4: ProfessorDocument19 pagesMITOCW - MITRES2 - 002s10linear - Lec03 - 300k-mp4: ProfessorDanielPas encore d'évaluation
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument21 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaPas encore d'évaluation
- Lec40 PDFDocument23 pagesLec40 PDFpothirajPas encore d'évaluation
- IntegrationDocument10 pagesIntegrationProsper DibakoanePas encore d'évaluation
- Lec4 PDFDocument19 pagesLec4 PDFAbhishek AroraPas encore d'évaluation
- Instructor (Brad Osgood) :does Somebody Know - Don't You Occasionally Get BadDocument10 pagesInstructor (Brad Osgood) :does Somebody Know - Don't You Occasionally Get BadElisée NdjabuPas encore d'évaluation
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6Document22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6abimanaPas encore d'évaluation
- Mitocw - Watch?V 7Nrymx1Ulis: ProfessorDocument24 pagesMitocw - Watch?V 7Nrymx1Ulis: ProfessordeependrasinghjadounPas encore d'évaluation
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleDocument12 pagesTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuPas encore d'évaluation
- Edsc 304 Graphic Organizer RubricDocument2 pagesEdsc 304 Graphic Organizer Rubricapi-377652082Pas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorDocument15 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorBastian DewiPas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorDocument24 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorBastian DewiPas encore d'évaluation
- MITOCW - MITRES2 - 002s10nonlinear - Lec09 - 300k-mp4: ProfessorDocument13 pagesMITOCW - MITRES2 - 002s10nonlinear - Lec09 - 300k-mp4: ProfessorBastian DewiPas encore d'évaluation
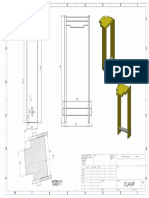
- Clamp - Sheet1 PDFDocument1 pageClamp - Sheet1 PDFBastian DewiPas encore d'évaluation
- Plat Atas - Sheet1Document1 pagePlat Atas - Sheet1Bastian DewiPas encore d'évaluation
- QHADocument82 pagesQHABastian DewiPas encore d'évaluation
- Clamp - Sheet1Document1 pageClamp - Sheet1Bastian DewiPas encore d'évaluation
- Performance of 2d Frame OptimizationDocument21 pagesPerformance of 2d Frame OptimizationBastian DewiPas encore d'évaluation
- Terrain Awareness Warning SystemsDocument19 pagesTerrain Awareness Warning SystemsgechosfacePas encore d'évaluation
- Dr. Mukesh Kumar Department of Earthquake Engineering, NED University, KarachiDocument37 pagesDr. Mukesh Kumar Department of Earthquake Engineering, NED University, KarachiMukesh KumarPas encore d'évaluation
- Design, Analysis, Fabrication and Testing of A Formula Car ChassisDocument10 pagesDesign, Analysis, Fabrication and Testing of A Formula Car ChassisSavalia HardikPas encore d'évaluation
- PEX250í 1200 Instruction ManualDocument10 pagesPEX250í 1200 Instruction ManualSebastian Aguila RaipanPas encore d'évaluation
- Annual Plans 7th GradeDocument5 pagesAnnual Plans 7th GradeDiego Antonio RodriguezPas encore d'évaluation
- Mott Appendix PDFDocument65 pagesMott Appendix PDFbrian_fanPas encore d'évaluation
- ME101 Lecture08 KD PDFDocument25 pagesME101 Lecture08 KD PDFR MathewPas encore d'évaluation
- 65-Finite-Element-Analysis-Of-Pipes-Conveying-Fluid Mounted-On-Viscoelastic-FoundationsDocument14 pages65-Finite-Element-Analysis-Of-Pipes-Conveying-Fluid Mounted-On-Viscoelastic-FoundationsDaniel Andres VargasPas encore d'évaluation
- Shop Drawing Submittal: Project: Project No. Client: Consultant: Contractor: 20-373-DS-ARC-PE-21Document129 pagesShop Drawing Submittal: Project: Project No. Client: Consultant: Contractor: 20-373-DS-ARC-PE-21Ernest NavarroPas encore d'évaluation
- Terms Detail No - of GB Test NameDocument80 pagesTerms Detail No - of GB Test NameTarek FennichePas encore d'évaluation
- Quality On Yarn 1Document39 pagesQuality On Yarn 1Ashiq Khan100% (1)
- GasCalc Module enDocument2 pagesGasCalc Module ensppramPas encore d'évaluation
- Matlab Fourier Series Signal & SystemDocument15 pagesMatlab Fourier Series Signal & SystemNik Ahmad FaisalPas encore d'évaluation
- Ujian Nasional Bahasa Inggris SMA Tahun 1994Document6 pagesUjian Nasional Bahasa Inggris SMA Tahun 1994Andhika A. SetiyonoPas encore d'évaluation
- Observation Lesson in Physics DLP Activity 2 Now You Go Now Yu WontDocument2 pagesObservation Lesson in Physics DLP Activity 2 Now You Go Now Yu WontEmma Santua50% (2)
- Usepa - 3051 ADocument30 pagesUsepa - 3051 Awrangel_2Pas encore d'évaluation
- Nonlinear Systems: Lyapunov Stability Theory - Part 2Document36 pagesNonlinear Systems: Lyapunov Stability Theory - Part 2giacomoPas encore d'évaluation
- Advanced Som SyllabusDocument1 pageAdvanced Som SyllabusRaj Kumar0% (1)
- ANSA v17.0.0 Release NotesDocument63 pagesANSA v17.0.0 Release NotesVishnu RaghavanPas encore d'évaluation
- HTTPSWWW - Mathsgenie.co - Ukresources4 Plans and Elevations PDFDocument8 pagesHTTPSWWW - Mathsgenie.co - Ukresources4 Plans and Elevations PDFruth.ameyxxPas encore d'évaluation
- Articulo de Felipe Calizaya (1ra Parte)Document5 pagesArticulo de Felipe Calizaya (1ra Parte)Gustavo PBPas encore d'évaluation
- WHCP BasicsDocument21 pagesWHCP BasicsbalajiPas encore d'évaluation
- Forces Balanced and UnbalancedDocument24 pagesForces Balanced and UnbalancedInah Cunanan-BaletePas encore d'évaluation
- ESAS Physics QuestionsDocument22 pagesESAS Physics QuestionsErika Mae OrlinaPas encore d'évaluation
- RAO, Capitulo 14, VibracionesDocument61 pagesRAO, Capitulo 14, Vibracioneskazekage2009Pas encore d'évaluation
- ECMC2T4Document3 pagesECMC2T4kprk414Pas encore d'évaluation
- Problem Set 2Document2 pagesProblem Set 2engineerPas encore d'évaluation
- Border Security Using Wireless Integrated Network Sensors (WINS)Document18 pagesBorder Security Using Wireless Integrated Network Sensors (WINS)Pradeep CheekatlaPas encore d'évaluation