Vous aimerez peut-être aussi
- Verifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPD'EverandVerifica e confronto delle soluzioni di un telaio: Metodo degli spostamenti e analisi matriciale con codice SAPPas encore d'évaluation
- Programma Controlli AutomaticiDocument3 pagesProgramma Controlli AutomaticiBenito Giulio FerroPas encore d'évaluation
- Descrizione CorsoDocument2 pagesDescrizione CorsoAndrea FrascaPas encore d'évaluation
- Gestione Cazzoli 13-14Document2 pagesGestione Cazzoli 13-14GiuseppinaPas encore d'évaluation
- Programma SDC 9 CFUDocument2 pagesProgramma SDC 9 CFUAlexandros GoulasPas encore d'évaluation
- Rappresentazioni Ingresso UscitaDocument2 pagesRappresentazioni Ingresso UscitaRebel PalestrePas encore d'évaluation
- MIDAS Gen Modale-TimeHistoryDocument9 pagesMIDAS Gen Modale-TimeHistorymarch009Pas encore d'évaluation
- Oscillazioni e Caos - PLS 2022Document23 pagesOscillazioni e Caos - PLS 2022Alessio ParlatiPas encore d'évaluation
- Fondamenti Di AutomaticaDocument39 pagesFondamenti Di Automaticamona_mi8202Pas encore d'évaluation
- Sist DinDocument170 pagesSist DinVittorio De LuciaPas encore d'évaluation
- ProgrammaDocument3 pagesProgrammamarcoPas encore d'évaluation
- PSCDocument41 pagesPSCLeotta GianfrancoPas encore d'évaluation
- CSP00135 (GEN-Teoria) Analisi Modale Con Spettro Di Risposta e Time HistoryDocument9 pagesCSP00135 (GEN-Teoria) Analisi Modale Con Spettro Di Risposta e Time Historybosnia76Pas encore d'évaluation
- SistemidinamicieautoorganizzazioneDocument41 pagesSistemidinamicieautoorganizzazioneRita PizziPas encore d'évaluation
- 4463elettrotecnica (FDocument3 pages4463elettrotecnica (FMarco PriviteraPas encore d'évaluation
- Identificazione Parametrica Di Modelli EconometriciDocument91 pagesIdentificazione Parametrica Di Modelli EconometriciAndrea TamburriPas encore d'évaluation
- Oscillazioni e Caos - PLS Fisica 2022 - Alessio Parlati and Italo TestaDocument23 pagesOscillazioni e Caos - PLS Fisica 2022 - Alessio Parlati and Italo TestaAlessio ParlatiPas encore d'évaluation
- Programma D'esame: Politecnico Di Milano - Facoltà Di Ingegneria Programmi Degli Insegnamenti A.A. 1995/96Document401 pagesProgramma D'esame: Politecnico Di Milano - Facoltà Di Ingegneria Programmi Degli Insegnamenti A.A. 1995/96fake guyPas encore d'évaluation
- Registro Delle Lezioni - Teoria Dei SistemiDocument1 pageRegistro Delle Lezioni - Teoria Dei SistemiFrancesca SartiniPas encore d'évaluation
- Controlli AutomaticiDocument3 pagesControlli AutomaticiDomenico MereuPas encore d'évaluation
- mcp30001 PDFDocument4 pagesmcp30001 PDFAlberto RiveraPas encore d'évaluation
- Nelinearni SistemiDocument134 pagesNelinearni SistemiОгњен Гроздановић100% (1)
- Controllo Digitale Di Sistemi Dinamici PDFDocument35 pagesControllo Digitale Di Sistemi Dinamici PDFigino casaniPas encore d'évaluation
- 01 Modelli e ReattoriDocument19 pages01 Modelli e ReattoriAlessio ScarabelliPas encore d'évaluation
- Analisi Lineare e Non Lineare PontiDocument61 pagesAnalisi Lineare e Non Lineare PontilamuPas encore d'évaluation
- Corso Di Laurea in Tecniche Di Radiologia Medica, Per Immagini E RadioterapiaDocument39 pagesCorso Di Laurea in Tecniche Di Radiologia Medica, Per Immagini E Radioterapiamantik0rePas encore d'évaluation
- Dispensa 1 Professor VerriDocument11 pagesDispensa 1 Professor VerriabdallahlotfylPas encore d'évaluation
- Modelli Della FisicaDocument79 pagesModelli Della FisicaAndrea Bongy QuartaPas encore d'évaluation
- (IC) ProgrammaDocument2 pages(IC) ProgrammaBenedettaDeBernardoPas encore d'évaluation
- Tecnica Delle Costruzioni MeccanicheDocument3 pagesTecnica Delle Costruzioni Meccaniche47ASSOPas encore d'évaluation
- DSM - 1° Parte PDFDocument333 pagesDSM - 1° Parte PDFAlbertPas encore d'évaluation
- Fatica Nelle CostruzioniDocument5 pagesFatica Nelle CostruzioniChiara MerliPas encore d'évaluation
- Tesi Roberta BelfioreDocument167 pagesTesi Roberta Belfiorebosnia76Pas encore d'évaluation
- Nonlinear 2Document14 pagesNonlinear 2Rana HatemPas encore d'évaluation
- Programma Sistemi 3AEA 21-22Document3 pagesProgramma Sistemi 3AEA 21-22Gabriele ModiniPas encore d'évaluation
- Domande Per L'esame Orale Di Fondamenti Di MisureDocument1 pageDomande Per L'esame Orale Di Fondamenti Di MisureMarioVerdicchioPas encore d'évaluation
- Program MaDocument4 pagesProgram MaalermsPas encore d'évaluation
- Programma Lezioni Analisi 1 PoliToDocument2 pagesProgramma Lezioni Analisi 1 PoliToFilippoMariaOttavianiPas encore d'évaluation
- Programma Dinamica Delle Strutture AA2014-2015Document2 pagesProgramma Dinamica Delle Strutture AA2014-2015GiovanniCuocoPas encore d'évaluation
- 1 - Misure in Campo Biomedico - 4Document36 pages1 - Misure in Campo Biomedico - 4domenico pioPas encore d'évaluation
- Questions About MechatronicsDocument2 pagesQuestions About MechatronicsAranzullaPas encore d'évaluation
- Esercitazioni Dal Corso Di Meccanica Delle VibrazioniDocument120 pagesEsercitazioni Dal Corso Di Meccanica Delle VibrazioniAlfredo PatriziPas encore d'évaluation
- Programma LabCalc 2010 11Document2 pagesProgramma LabCalc 2010 11seek_and_destroy_4_uPas encore d'évaluation
- Esercizi Algoritmi e Strutture DatiDocument107 pagesEsercizi Algoritmi e Strutture DatibossmilanPas encore d'évaluation
- Least Squares Estimation NotesDocument55 pagesLeast Squares Estimation Notessettembrinimatteo100% (1)
- Lecture Panel Dynamic Theory - En.itDocument27 pagesLecture Panel Dynamic Theory - En.itPatrick CovatoPas encore d'évaluation
- Programma Meccanica Razionale PDFDocument3 pagesProgramma Meccanica Razionale PDFMarioPas encore d'évaluation
- INDICE Del LibroDocument4 pagesINDICE Del LibroAlfio AlfiniPas encore d'évaluation
- TesiDocument150 pagesTesiclaudioPas encore d'évaluation
- TeoriacompletacontrolliDocument310 pagesTeoriacompletacontrolliFrancesco MatrangaPas encore d'évaluation
- 1 Fing 11Document174 pages1 Fing 11HULIOSMELLAPas encore d'évaluation
- Fisica Con Elementi Di Matematica FA 2011 12 PDFDocument1 pageFisica Con Elementi Di Matematica FA 2011 12 PDFAlan DoevPas encore d'évaluation
- Allegato 4 PDFDocument3 pagesAllegato 4 PDFMichele MalasisiPas encore d'évaluation
- 2 (1) - Errori Ed IncertezzeDocument23 pages2 (1) - Errori Ed IncertezzeAndrea CozzolinoPas encore d'évaluation
- Non Line AreDocument14 pagesNon Line AregregoriopiccoliPas encore d'évaluation
- 01 Sonda TermometricaDocument11 pages01 Sonda TermometricaLaura VignaPas encore d'évaluation
- Controlli AutomaticiDocument188 pagesControlli AutomaticiivanPas encore d'évaluation
- Programma Ingind16 PDFDocument2 pagesProgramma Ingind16 PDFLeotta GianfrancoPas encore d'évaluation
- SR001 - Scheda Accreditamenti Ospitaletto 2019 (1658)Document1 pageSR001 - Scheda Accreditamenti Ospitaletto 2019 (1658)Leotta GianfrancoPas encore d'évaluation
- Traccia Didattica Fiat Panda 4x4Document91 pagesTraccia Didattica Fiat Panda 4x4Michele Colombo100% (1)
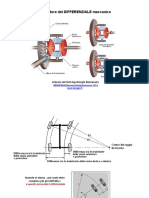
- Differen Zia LeDocument27 pagesDifferen Zia Leleo100% (1)
- Programma Ingind16 PDFDocument2 pagesProgramma Ingind16 PDFLeotta GianfrancoPas encore d'évaluation
- 6 DiffzialeDocument20 pages6 DiffzialeLeotta GianfrancoPas encore d'évaluation
- 6 EserciziCicliavapore PDFDocument13 pages6 EserciziCicliavapore PDFLeotta GianfrancoPas encore d'évaluation
- FFBNFGBDocument44 pagesFFBNFGBLeotta GianfrancoPas encore d'évaluation
- 6 EserciziCicliavapore PDFDocument13 pages6 EserciziCicliavapore PDFLeotta GianfrancoPas encore d'évaluation
- VMU-Formulario Macchine A Fluido (V. 3) PDFDocument11 pagesVMU-Formulario Macchine A Fluido (V. 3) PDFLeotta Gianfranco100% (3)
- 6 DiffzialeDocument20 pages6 DiffzialeLeotta GianfrancoPas encore d'évaluation
- TemplateDocument4 pagesTemplateLeotta GianfrancoPas encore d'évaluation
- Unict 6615Document4 pagesUnict 6615Leotta GianfrancoPas encore d'évaluation
- Differen Zia LeDocument27 pagesDifferen Zia Leleo100% (1)
- Mollier2 0Document60 pagesMollier2 0Leotta GianfrancoPas encore d'évaluation
- Potere CalorificoDocument1 pagePotere CalorificoBrandon DouglasPas encore d'évaluation
- Lez 11Document25 pagesLez 11Leotta GianfrancoPas encore d'évaluation
- Potere Calorifico InferioreDocument3 pagesPotere Calorifico InferioreLeotta GianfrancoPas encore d'évaluation
- PSCDocument41 pagesPSCLeotta GianfrancoPas encore d'évaluation
- Editornotes Outline SymbolslistDocument27 pagesEditornotes Outline SymbolslistLeotta GianfrancoPas encore d'évaluation
- SDC Parte 5 CDocument85 pagesSDC Parte 5 CLeotta GianfrancoPas encore d'évaluation
- Scienza Costruzioni PDFDocument98 pagesScienza Costruzioni PDFLeotta GianfrancoPas encore d'évaluation
- Travi PDFDocument44 pagesTravi PDFLeotta GianfrancoPas encore d'évaluation
- Claudio Franciosi - Scienza Delle CostruzioniDocument516 pagesClaudio Franciosi - Scienza Delle CostruzioniBarbara Tax0% (1)
- Unict 6611Document5 pagesUnict 6611Leotta GianfrancoPas encore d'évaluation
- Perchè Mi Piacciono I TreniDocument3 pagesPerchè Mi Piacciono I TreniLeotta GianfrancoPas encore d'évaluation
- Help Calcolo Lin FunDocument9 pagesHelp Calcolo Lin FunGiancarlo MoiPas encore d'évaluation
- Comincioli Analisi Numerica PDFDocument2 pagesComincioli Analisi Numerica PDFJessicaPas encore d'évaluation
- Capitolo CFDDocument12 pagesCapitolo CFDHernan MarianiPas encore d'évaluation
- Albert Einstein - La Teoria Di Campo Offre Delle Possibilità Per La Soluzione Del Problema Dei QuantiDocument5 pagesAlbert Einstein - La Teoria Di Campo Offre Delle Possibilità Per La Soluzione Del Problema Dei QuantiCiopCipPas encore d'évaluation
- Meccanica MatricialeDocument3 pagesMeccanica Matricialeantonio0% (1)
- Macstars W 4.0 - Note Tecniche - ITADocument48 pagesMacstars W 4.0 - Note Tecniche - ITAsimone stano0% (1)