Vous aimerez peut-être aussi
- Ficha - Mat CarnavalDocument4 pagesFicha - Mat CarnavalRogério Paulo X RodriguesPas encore d'évaluation
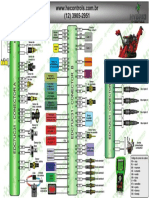
- Teste Foto AcopladorDocument1 pageTeste Foto AcopladorRocksley Mariano0% (1)
- Curso de Modflow PDFDocument183 pagesCurso de Modflow PDFJean VilcaPas encore d'évaluation
- Biologia 12º08Document3 pagesBiologia 12º08Laura GonçalvesPas encore d'évaluation
- Robotica Aula2Document21 pagesRobotica Aula2Silvano PereiraPas encore d'évaluation
- ColheitadeiraDocument1 pageColheitadeiraValdeir Jesus (Técnico em VOLVO)100% (1)
- Mapeamento E Monitoramento Dos Processos Erosivos No Município de São Luís - MaDocument6 pagesMapeamento E Monitoramento Dos Processos Erosivos No Município de São Luís - MawendelldiasPas encore d'évaluation
- Tabelas Nomes ProtheusDocument134 pagesTabelas Nomes ProtheusJulio DiasPas encore d'évaluation
- E-Book Intercâmbio Voluntário IIIDocument57 pagesE-Book Intercâmbio Voluntário IIIeduardamonteruzoPas encore d'évaluation
- Exercícios 1 Sobre CircunferênciaDocument2 pagesExercícios 1 Sobre CircunferênciaNicole De Moraes Barrozo100% (1)
- Positivo Premium-Manual-UsuarioDocument32 pagesPositivo Premium-Manual-UsuarioVladimir Colombiano de Souza100% (1)
- Hermetismo Revelado PDFDocument1 pageHermetismo Revelado PDFÍtalo MarinhoPas encore d'évaluation
- Por Que o Pesquisador Social Usa A Estatística - Estatística para Ciências HumanasDocument4 pagesPor Que o Pesquisador Social Usa A Estatística - Estatística para Ciências HumanasMelissa Duarte OrestesPas encore d'évaluation
- Apostila de Probabilidade e Estatística Parte 1Document35 pagesApostila de Probabilidade e Estatística Parte 1Ivone ChavesPas encore d'évaluation
- Avaliação MOPP - MovimentaçãoDocument3 pagesAvaliação MOPP - Movimentaçãojean bueno100% (2)
- Republica Brasileira - de Deodoro A Bolsona - Paulo GhiraldelliDocument151 pagesRepublica Brasileira - de Deodoro A Bolsona - Paulo GhiraldelliDawahad AzhirPas encore d'évaluation
- Catalogo Orion FINALDocument64 pagesCatalogo Orion FINALmpcbf1_717088774Pas encore d'évaluation
- Apostila LiderançaDocument30 pagesApostila Liderançailuminarteatelier freirealbanoPas encore d'évaluation
- Laços Frágeis e Identidades FragmentadasDocument288 pagesLaços Frágeis e Identidades FragmentadasLuís Augusto LopesPas encore d'évaluation
- Atividade Sobre Aquecimento GlobalDocument1 pageAtividade Sobre Aquecimento Globalfabiolafranca80Pas encore d'évaluation
- Seção 21Document156 pagesSeção 21José Roberto VircentsPas encore d'évaluation
- Normas Gerais TCC UEAPDocument20 pagesNormas Gerais TCC UEAPTiago Cardoso de SousaPas encore d'évaluation
- Avg de Mat 4 Bim 6 Ano CepaDocument6 pagesAvg de Mat 4 Bim 6 Ano CepaKátia RenêPas encore d'évaluation
- Características de Comportamento Empreendedor Conjunto de Realização Busca de Oportunidades e IniciativaDocument2 pagesCaracterísticas de Comportamento Empreendedor Conjunto de Realização Busca de Oportunidades e IniciativaEwerton CorreaPas encore d'évaluation
- Cartilha SUAS PDFDocument62 pagesCartilha SUAS PDFVanusia AlvesPas encore d'évaluation
- Estudos Sobre A Contemporaneidade I (2023.1)Document4 pagesEstudos Sobre A Contemporaneidade I (2023.1)Ramon FontesPas encore d'évaluation
- Prevencionismo No Brasil e No MundoDocument6 pagesPrevencionismo No Brasil e No MundoMatheus RodriguesPas encore d'évaluation
- Livro Castanheiro PDFDocument218 pagesLivro Castanheiro PDFEliana E MindoPas encore d'évaluation
- Exercícios - 2Document8 pagesExercícios - 2Suellen RochaPas encore d'évaluation
- Exemplo de Grelha de Análise Critica de Artigo Investigação QuantitativaDocument1 pageExemplo de Grelha de Análise Critica de Artigo Investigação QuantitativaPaula Andrade100% (1)