Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Shop Manual WA380-3LE SN A50001Document758 pagesShop Manual WA380-3LE SN A50001Eliecer godoy100% (2)
- ASTM E92-17 Standard Test Methods For Vickers Hardness and Knoop Hardness of Metallic MaterialsDocument27 pagesASTM E92-17 Standard Test Methods For Vickers Hardness and Knoop Hardness of Metallic MaterialsCarlos Pinto Pradilla88% (8)
- Yasnac Mx-3 Fault Finding GuideDocument70 pagesYasnac Mx-3 Fault Finding Guidechidambaram kasi100% (1)
- Module Digital Hardware For Hardware - Software Co-Design.Document84 pagesModule Digital Hardware For Hardware - Software Co-Design.mohamedabbas_us3813Pas encore d'évaluation
- Disgn and Implementation of An Embedded Romete EGC Measurement SystemDocument6 pagesDisgn and Implementation of An Embedded Romete EGC Measurement Systemmohamedabbas_us3813Pas encore d'évaluation
- Amir Maleki Moghaddam: Advanced Workflow To Evaluate and Compare The Performance of Directional Drilling Control ToolsDocument80 pagesAmir Maleki Moghaddam: Advanced Workflow To Evaluate and Compare The Performance of Directional Drilling Control ToolsSebastian OrdoñezPas encore d'évaluation
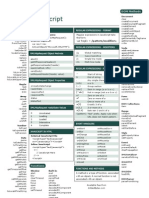
- Javascript Cheat SheetDocument1 pageJavascript Cheat Sheetdanielle leigh100% (4)
- CanDocument19 pagesCanChristie SajithaPas encore d'évaluation
- Module Distributed Embedded Software PDFDocument3 pagesModule Distributed Embedded Software PDFmohamedabbas_us3813Pas encore d'évaluation
- Linux Command Cheat Sheet From Davechild Linux Command Line - at Anewdomain - Net With Gina Smith, John C. DvorakDocument2 pagesLinux Command Cheat Sheet From Davechild Linux Command Line - at Anewdomain - Net With Gina Smith, John C. DvorakGina Smith100% (1)
- L Linux Process Management PDFDocument11 pagesL Linux Process Management PDFVaishnavi EswarPas encore d'évaluation
- Module Physical Layer Design - Design, Assembly and Testing of A Custom Wireless Sensor Node PDFDocument3 pagesModule Physical Layer Design - Design, Assembly and Testing of A Custom Wireless Sensor Node PDFmohamedabbas_us3813Pas encore d'évaluation
- Module Master of Engineering Project For Embedded Systems EngineeringDocument3 pagesModule Master of Engineering Project For Embedded Systems Engineeringmohamedabbas_us3813Pas encore d'évaluation
- Module Digital Hardware For Hardware - Software Co-Design PDFDocument3 pagesModule Digital Hardware For Hardware - Software Co-Design PDFmohamedabbas_us3813Pas encore d'évaluation
- Module Embedded Software NetworkingDocument3 pagesModule Embedded Software Networkingmohamedabbas_us3813Pas encore d'évaluation
- Module Technologies For Embedded Networking PDFDocument3 pagesModule Technologies For Embedded Networking PDFmohamedabbas_us3813Pas encore d'évaluation
- Module Team Project - Implementation Phase PDFDocument3 pagesModule Team Project - Implementation Phase PDFmohamedabbas_us3813Pas encore d'évaluation
- Kernel HackingDocument24 pagesKernel Hackingmohamedabbas_us3813Pas encore d'évaluation
- Module Principles of Networking Embedded SystemsDocument3 pagesModule Principles of Networking Embedded Systemsmohamedabbas_us3813Pas encore d'évaluation
- Robot KinematicsDocument33 pagesRobot KinematicsengrasheedPas encore d'évaluation
- Introduction To Linux Device Drivers: Recreating Life One Driver at A TimeDocument50 pagesIntroduction To Linux Device Drivers: Recreating Life One Driver at A TimeEduardo PrietoPas encore d'évaluation
- Compositional Verification of Middleware-Based Software Architecture DescriptionDocument10 pagesCompositional Verification of Middleware-Based Software Architecture Descriptionmohamedabbas_us3813Pas encore d'évaluation
- Chuleta CssDocument1 pageChuleta CssoscarlopgaPas encore d'évaluation
- A Security Embedded System Base On TCM and FPGADocument5 pagesA Security Embedded System Base On TCM and FPGAmohamedabbas_us3813Pas encore d'évaluation
- Understanding The Physics of Electrodynamic Shaker Performance by G.F. Lang and D. SnyderDocument10 pagesUnderstanding The Physics of Electrodynamic Shaker Performance by G.F. Lang and D. Snydermohamedabbas_us3813Pas encore d'évaluation
- U Bootdoc PDFDocument13 pagesU Bootdoc PDFDineshkumarparamesPas encore d'évaluation
- Linux Kernel InternalsDocument84 pagesLinux Kernel InternalsParesh TannaPas encore d'évaluation
- Spe 19989 PaDocument6 pagesSpe 19989 Pamohamedabbas_us3813Pas encore d'évaluation
- Spe 159223 - 6055197 - 01Document9 pagesSpe 159223 - 6055197 - 01mohamedabbas_us3813Pas encore d'évaluation
- Spe 22542 MSDocument10 pagesSpe 22542 MSmohamedabbas_us3813Pas encore d'évaluation
- Spe 128129 PaDocument9 pagesSpe 128129 Pamohamedabbas_us3813Pas encore d'évaluation
- SPE 131922 BHA and Drill String Fundamentals Technology Training For BeginnersDocument13 pagesSPE 131922 BHA and Drill String Fundamentals Technology Training For Beginnersmohamedabbas_us3813Pas encore d'évaluation
- Case Study-R12 12Document81 pagesCase Study-R12 12ranjitpandeyPas encore d'évaluation
- Chapter 4-EDocument42 pagesChapter 4-EMahrouz MadoPas encore d'évaluation
- List of Diagnostic Trouble Code (DTC)Document5 pagesList of Diagnostic Trouble Code (DTC)Dev Vrat BohraPas encore d'évaluation
- BDOs SheetsDocument25 pagesBDOs Sheets3J Solutions BDPas encore d'évaluation
- Purushothaman.V Head-Technical 9500118390: Kind Attn: Ln. RDocument9 pagesPurushothaman.V Head-Technical 9500118390: Kind Attn: Ln. RsramkmPas encore d'évaluation
- NM Group Plumbing WorkDocument33 pagesNM Group Plumbing WorkNM GROUPPas encore d'évaluation
- FD FX Brochure Update 072020Document9 pagesFD FX Brochure Update 072020Alex PomaPas encore d'évaluation
- Ahmed Mohammed EL Desouky 2007Document8 pagesAhmed Mohammed EL Desouky 2007Hazem MohamedPas encore d'évaluation
- Engineering QuotesDocument10 pagesEngineering QuotesGendakenPas encore d'évaluation
- Leg Foot Massager 1026 ManualDocument5 pagesLeg Foot Massager 1026 ManualBhushan BhikePas encore d'évaluation
- Multi-disciplinary profile of IS/IT outsourcing researchDocument47 pagesMulti-disciplinary profile of IS/IT outsourcing researchIsabel MirandaPas encore d'évaluation
- (Mamoru Hosaka (Auth.) ) Modeling of Curves and SuDocument363 pages(Mamoru Hosaka (Auth.) ) Modeling of Curves and Suamalendu_biswas_1Pas encore d'évaluation
- Gas Sensors: Jiturvi Chokshi ENPM-808BDocument27 pagesGas Sensors: Jiturvi Chokshi ENPM-808Banon_44955929Pas encore d'évaluation
- Chapter 15. Applications of Integration: Exercises 15.2Document2 pagesChapter 15. Applications of Integration: Exercises 15.2Donghyun AhnPas encore d'évaluation
- Lightning Protection System Testing & Commissioning Method StatementDocument3 pagesLightning Protection System Testing & Commissioning Method Statementvin ssPas encore d'évaluation
- 2019 Zeta Zwheel Catalogs PDFDocument30 pages2019 Zeta Zwheel Catalogs PDFSales One - Plusgrow - IndiaPas encore d'évaluation
- 2010 Xstrata VOD Implementation - BartschDocument35 pages2010 Xstrata VOD Implementation - BartschFlávia GomesPas encore d'évaluation
- 5SL43407RC Datasheet enDocument5 pages5SL43407RC Datasheet enDiana Martinez SifuentesPas encore d'évaluation
- DTH Equipment - Product - Catalogue - tcm45-3560033 PDFDocument48 pagesDTH Equipment - Product - Catalogue - tcm45-3560033 PDFJALFAROROPas encore d'évaluation
- CRCM Manual 2 9 16Document33 pagesCRCM Manual 2 9 16Kamagara Roland AndrewPas encore d'évaluation
- Sheds Direct Ireland's Wooden BrochureDocument12 pagesSheds Direct Ireland's Wooden BrochureVictor Celestino Montañez CarranzaPas encore d'évaluation
- Signals and Systems - MjrobertsDocument3 pagesSignals and Systems - Mjrobertspriyakanthr5883100% (1)
- GameBoy Programming ManualDocument298 pagesGameBoy Programming Manualdiceman2037100% (4)
- 70005144e 1314001 PDFDocument501 pages70005144e 1314001 PDFLuis FernandoPas encore d'évaluation
- Lateral Earth Pressure TheoryDocument45 pagesLateral Earth Pressure TheoryAdel JamalPas encore d'évaluation
- CRSP ManualDocument140 pagesCRSP ManualCarlos Andrés Buenahora BallesterosPas encore d'évaluation
- A Rope of Mass 0.65 KG Is Stretched Between Two Supports 30 M Apart. If The Tension in The Rope Is 120 N, How Long Will It Take A Pulse To Travel From One Support To The Other?Document6 pagesA Rope of Mass 0.65 KG Is Stretched Between Two Supports 30 M Apart. If The Tension in The Rope Is 120 N, How Long Will It Take A Pulse To Travel From One Support To The Other?peyying12Pas encore d'évaluation