Vous aimerez peut-être aussi
- Introducción a las señales y sistemasD'EverandIntroducción a las señales y sistemasÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Fundamentos de sistemas de comunicaciones analógicasD'EverandFundamentos de sistemas de comunicaciones analógicasÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- MecanismosDocument13 pagesMecanismoscOrekernPas encore d'évaluation
- Apuntes Embrague Hidráulico y Convertidor de ParDocument18 pagesApuntes Embrague Hidráulico y Convertidor de ParGeobel HernandezPas encore d'évaluation
- Silabo Multicuerpo - Abet - 2022-2023Document3 pagesSilabo Multicuerpo - Abet - 2022-2023jairo alarconPas encore d'évaluation
- Silabo mt517 - ABETDocument3 pagesSilabo mt517 - ABETthoting100% (1)
- Actividad 2 Construcción Del Mecanismo PDFDocument5 pagesActividad 2 Construcción Del Mecanismo PDFMIGUEL AURELIO CAMARGO PAEZPas encore d'évaluation
- MC417Document5 pagesMC417Hector Luis UgartePas encore d'évaluation
- SÍLABO MT417 - Procesamiento - Digital - de - Senales - 2020-1-ABETDocument3 pagesSÍLABO MT417 - Procesamiento - Digital - de - Senales - 2020-1-ABETRenzoPas encore d'évaluation
- F2 PM122 Geometria Analitica Vectorial FIPDocument2 pagesF2 PM122 Geometria Analitica Vectorial FIPJulio ChaucaPas encore d'évaluation
- Silabo MC417Document5 pagesSilabo MC417anajulcaPas encore d'évaluation
- Silabo Con Formato ABET de Analisis de Señales y Sistemas (EE-610M)Document4 pagesSilabo Con Formato ABET de Analisis de Señales y Sistemas (EE-610M)fiboPas encore d'évaluation
- EE647 - Silabo Sistemas de Control IDocument3 pagesEE647 - Silabo Sistemas de Control IMARCOS JAHIMI TORERO SORALUZPas encore d'évaluation
- MB155 - Silabo 2018-2Document4 pagesMB155 - Silabo 2018-2CESAR DEIVI SANTISTEBAN TUÑOQUEPas encore d'évaluation
- Procesamiento Digital Señales - Curso UNIDocument3 pagesProcesamiento Digital Señales - Curso UNIByahuxPas encore d'évaluation
- MB157 - SILABO 2019-1 Malla NuevaDocument4 pagesMB157 - SILABO 2019-1 Malla NuevaMiguel Huallpa HPas encore d'évaluation
- Cálculo Vectorial UNI: Funciones, Integración, CamposDocument5 pagesCálculo Vectorial UNI: Funciones, Integración, CamposRafaelPas encore d'évaluation
- Silabo - Control Moderno Acredita 2017 2Document2 pagesSilabo - Control Moderno Acredita 2017 2Carlos Alberto Evangelista BussoPas encore d'évaluation
- EL178 Señales y Sistemas 201600Document5 pagesEL178 Señales y Sistemas 201600Clases MatematicasPas encore d'évaluation
- MT516Document6 pagesMT516Carlos CarrilloPas encore d'évaluation
- Elementos Mecánifcos AutomotricesDocument12 pagesElementos Mecánifcos AutomotricesKeviin Cruz100% (1)
- 4mecanismos IDocument4 pages4mecanismos IMaster Memes UptcPas encore d'évaluation
- Silabo MT230Document6 pagesSilabo MT230DanielPantojaPas encore d'évaluation
- Temario DinMaqDocument3 pagesTemario DinMaqAlejandro waamPas encore d'évaluation
- Mecanismos 2Document5 pagesMecanismos 2doritaxxPas encore d'évaluation
- Silabo Control Digital ABETDocument4 pagesSilabo Control Digital ABETDeam AlvaPas encore d'évaluation
- Silabo Robotica 2016 IDocument5 pagesSilabo Robotica 2016 Ibay_2424Pas encore d'évaluation
- MT221 SCompe FS2020Document3 pagesMT221 SCompe FS2020Jesús OscoPas encore d'évaluation
- Silabo EstaticaDocument4 pagesSilabo EstaticaElizabethPas encore d'évaluation
- 23 Aaf 8 F 6Document5 pages23 Aaf 8 F 6Elias Lozano GonzalesPas encore d'évaluation
- 25 IME Mecanica - Racional PDFDocument6 pages25 IME Mecanica - Racional PDFduviniPas encore d'évaluation
- MB157 - SILABO 2019-2 Ecuaciones DifDocument4 pagesMB157 - SILABO 2019-2 Ecuaciones DifJorge Barzola GomezPas encore d'évaluation
- Dinámica de máquinas universidad simón bolívarDocument2 pagesDinámica de máquinas universidad simón bolívarWalter MorenoPas encore d'évaluation
- Introduccion A Los Modelos CuantitativosDocument3 pagesIntroduccion A Los Modelos Cuantitativosamra_26721Pas encore d'évaluation
- Modelado de Sistemas PDFDocument11 pagesModelado de Sistemas PDFGaz LetonaPas encore d'évaluation
- Newton - Raphson. Sintesis de MecanismoDocument267 pagesNewton - Raphson. Sintesis de MecanismoNello JaƞcarloPas encore d'évaluation
- 07 - Análisis Matemático IIDocument4 pages07 - Análisis Matemático IILucas VillagraPas encore d'évaluation
- SILABO - 2022-1MT417 Procesamiento Digital de SenalesDocument4 pagesSILABO - 2022-1MT417 Procesamiento Digital de SenalesDIEGO ALEJANDRO CASTILLO RAYMEPas encore d'évaluation
- S+¡labo MECANISMOS Y DINAMICA DE MAQUINAS 2018-ADocument11 pagesS+¡labo MECANISMOS Y DINAMICA DE MAQUINAS 2018-AJoseph Cristian Cruz LuquePas encore d'évaluation
- Silabo MT127Document4 pagesSilabo MT127Alejo977xPas encore d'évaluation
- Ecuaciones Diferenciales AplicadasDocument26 pagesEcuaciones Diferenciales AplicadasAlejandro González GonzálezPas encore d'évaluation
- MECANISMOSDocument4 pagesMECANISMOSCarmen Alicia RbPas encore d'évaluation
- Silabo Abet Mc417Document7 pagesSilabo Abet Mc417jorgePas encore d'évaluation
- TesisDocument267 pagesTesisAquilino Torres ArancibiaPas encore d'évaluation
- Dinamica AvanzadaDocument6 pagesDinamica AvanzadaLimbert Edwin BustillosPas encore d'évaluation
- Procesamiento Digital de SeñalesDocument29 pagesProcesamiento Digital de SeñalesWood Cross ArmandoPas encore d'évaluation
- MB148 - SILABO Calculo VectorialDocument5 pagesMB148 - SILABO Calculo VectorialCESAR DEIVI SANTISTEBAN TUÑOQUEPas encore d'évaluation
- Mecanismos UABCSDocument11 pagesMecanismos UABCSIvan MontoyaPas encore d'évaluation
- Sílabo Cálculo Diferencial 2023-1 Ay BDocument3 pagesSílabo Cálculo Diferencial 2023-1 Ay BDiego De LuceroPas encore d'évaluation
- (Lehmann) GeometriaAnaliticaDocument3 pages(Lehmann) GeometriaAnaliticaJoséPas encore d'évaluation
- Silabo MB 155 Ecuaciones Diferenciales 2023-2Document3 pagesSilabo MB 155 Ecuaciones Diferenciales 2023-226alfred09Pas encore d'évaluation
- Bma 01-Calculo DiferencialDocument3 pagesBma 01-Calculo DiferencialSORAYA JAZMIN HERRERA SANTIVAÑEZPas encore d'évaluation
- BMA01 Cálculo Diferencial - 2020-1Document3 pagesBMA01 Cálculo Diferencial - 2020-1George Salcedo DiazPas encore d'évaluation
- Análisis de MecanismosDocument75 pagesAnálisis de Mecanismosmonchocota0% (1)
- Sílabo MC338 - DinamicaDocument4 pagesSílabo MC338 - DinamicaDon Intercad100% (1)
- Enfoque práctico de la teoría de robots: Con aplicaciones en MatlabD'EverandEnfoque práctico de la teoría de robots: Con aplicaciones en MatlabÉvaluation : 5 sur 5 étoiles5/5 (2)
- Enfoque práctico de control moderno: Con aplicaciones en MatlabD'EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabÉvaluation : 5 sur 5 étoiles5/5 (1)
- Instrumentación electrónica aplicada: Prácticas de laboratorioD'EverandInstrumentación electrónica aplicada: Prácticas de laboratorioÉvaluation : 3.5 sur 5 étoiles3.5/5 (7)
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsD'EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsPas encore d'évaluation
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalD'EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalÉvaluation : 5 sur 5 étoiles5/5 (4)
- Informe Tecnico 01Document4 pagesInforme Tecnico 01Tony CamposPas encore d'évaluation
- Em - Iib Raz - MatematicoDocument2 pagesEm - Iib Raz - MatematicoTony CamposPas encore d'évaluation
- Préstamos vencidos empresa: S/ 470,608.73Document2 pagesPréstamos vencidos empresa: S/ 470,608.73Tony CamposPas encore d'évaluation
- Em - Iib ReligionDocument1 pageEm - Iib ReligionTony CamposPas encore d'évaluation
- Esquema interpretativo empresaDocument1 pageEsquema interpretativo empresaTony CamposPas encore d'évaluation
- Manual Arduinazo PDFDocument25 pagesManual Arduinazo PDFHernanPinedaCastroPas encore d'évaluation
- Em Arte IvmDocument2 pagesEm Arte IvmTony CamposPas encore d'évaluation
- Problema 2Document2 pagesProblema 2Tony CamposPas encore d'évaluation
- Manual Arduino PDFDocument38 pagesManual Arduino PDFandres_smolPas encore d'évaluation
- Trabajo 3 - Problema 1Document1 pageTrabajo 3 - Problema 1Tony CamposPas encore d'évaluation
- Em Ciencia y Ambiente IvbDocument2 pagesEm Ciencia y Ambiente IvbTony CamposPas encore d'évaluation
- Em Arte IvmDocument2 pagesEm Arte IvmTony CamposPas encore d'évaluation
- Introducción a JavaScriptDocument46 pagesIntroducción a JavaScriptGustavo ChavarriaPas encore d'évaluation
- 05 Angulo Diedro y Poliedro - 2doDocument13 pages05 Angulo Diedro y Poliedro - 2doTony CamposPas encore d'évaluation
- 05 Unidades de Volumen - 1roDocument17 pages05 Unidades de Volumen - 1roTony CamposPas encore d'évaluation
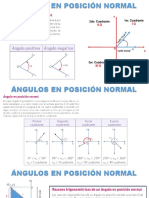
- 05 Angulos en Posicion Normal - 4toDocument10 pages05 Angulos en Posicion Normal - 4toTony CamposPas encore d'évaluation
- 1ro 4Document11 pages1ro 4Tony CamposPas encore d'évaluation
- (X Y) (X Y)Document11 pages(X Y) (X Y)Tony CamposPas encore d'évaluation
- 05 Angulos en Posicion Normal - 4toDocument10 pages05 Angulos en Posicion Normal - 4toTony CamposPas encore d'évaluation
- 05 Unidades de Volumen - 1roDocument17 pages05 Unidades de Volumen - 1roTony CamposPas encore d'évaluation
- (X Y) (X Y)Document11 pages(X Y) (X Y)Tony CamposPas encore d'évaluation
- 1ro 2Document2 pages1ro 2Tony CamposPas encore d'évaluation
- 1ro 1Document5 pages1ro 1Tony CamposPas encore d'évaluation
- 05 Angulo Diedro y Poliedro - 2doDocument13 pages05 Angulo Diedro y Poliedro - 2doTony CamposPas encore d'évaluation
- 10 Poliedro - 2doDocument13 pages10 Poliedro - 2doTony CamposPas encore d'évaluation
- 1ro 5Document7 pages1ro 5Tony CamposPas encore d'évaluation
- Solución parábolas ecuación generalDocument11 pagesSolución parábolas ecuación generalTony Campos0% (1)
- 05 Unidades de Volumen - 1roDocument17 pages05 Unidades de Volumen - 1roTony CamposPas encore d'évaluation
- 05 Unidades de Volumen - 1roDocument17 pages05 Unidades de Volumen - 1roTony CamposPas encore d'évaluation
- 05 Angulos en Posicion Normal - 4toDocument10 pages05 Angulos en Posicion Normal - 4toTony CamposPas encore d'évaluation
- Cuestionario Cultura Clásica. 8-Iii-2016Document5 pagesCuestionario Cultura Clásica. 8-Iii-2016Julián Esteso SepúlvedaPas encore d'évaluation
- Eje 1 Gestion Ambiental y MunicipalDocument6 pagesEje 1 Gestion Ambiental y Municipalluis enrique venner cortesPas encore d'évaluation
- Catalogo Nice MX 222Document148 pagesCatalogo Nice MX 222Alejanddra Solis cruzPas encore d'évaluation
- Como pagar CarrefourDocument3 pagesComo pagar CarrefourCALIDAD GEDCOPas encore d'évaluation
- Auditoría tributaria: Dividendos y fiscalizaciónDocument20 pagesAuditoría tributaria: Dividendos y fiscalizaciónIDELVA ROJAS MONTEZAPas encore d'évaluation
- LitioDocument55 pagesLitioSebastianNavarroJuarezPas encore d'évaluation
- Adivinacion ErindilogunDocument71 pagesAdivinacion ErindilogunRobinOshosiRodriguezPas encore d'évaluation
- Autoconcepto evaluación curso psicología personalidadDocument14 pagesAutoconcepto evaluación curso psicología personalidadVictor Prado100% (1)
- Giovana Osorno Rodriguez: Noción de La Comercialización InternacionalDocument5 pagesGiovana Osorno Rodriguez: Noción de La Comercialización InternacionalAngie AngelPas encore d'évaluation
- Estrategias para EvangelizarDocument10 pagesEstrategias para EvangelizarMillet ValeroPas encore d'évaluation
- Comunidad Campesina CatacaosDocument3 pagesComunidad Campesina CatacaosCesar Jaime SolanoPas encore d'évaluation
- Agudez Visual 2Document5 pagesAgudez Visual 2alexaPas encore d'évaluation
- Etica Personal y Dignidad HumanaDocument11 pagesEtica Personal y Dignidad HumanaMiriam GGPas encore d'évaluation
- Educacion ReligiosaDocument6 pagesEducacion ReligiosaMiguel OrdonioPas encore d'évaluation
- CapelDocument21 pagesCapelLaurence Tapia100% (1)
- Kanban Qué Es Las 6 Prácticas Principios de Gestión Del Cambio Qué No Es Principios de Gestión Del ServicioDocument8 pagesKanban Qué Es Las 6 Prácticas Principios de Gestión Del Cambio Qué No Es Principios de Gestión Del ServicioJavier CaraguichePas encore d'évaluation
- Sesion de Aprendizaje 1 - Lunes 26 de SetiembreDocument15 pagesSesion de Aprendizaje 1 - Lunes 26 de SetiembreSol Angela Quispe RodriguesPas encore d'évaluation
- Datos Incompletos - Verano AlegreDocument8 pagesDatos Incompletos - Verano AlegreJorge CuyunPas encore d'évaluation
- Psfoundationsvol 1 SpaDocument211 pagesPsfoundationsvol 1 SpaAmnerys CuevasPas encore d'évaluation
- Pauta de Autopercepción ComunicativaDocument2 pagesPauta de Autopercepción ComunicativaKMAPas encore d'évaluation
- CovarianzaCorrelaciónEstadísticasIndependenciaDocument2 pagesCovarianzaCorrelaciónEstadísticasIndependenciaJuan Diego CruzPas encore d'évaluation
- Juegos Matem TicosDocument6 pagesJuegos Matem Ticosdisonant2014Pas encore d'évaluation
- Tesis de Instalacion de Internet Inalambrico PDFDocument253 pagesTesis de Instalacion de Internet Inalambrico PDFLuis Gutierrez Salazar0% (1)
- Aritmetica Sem 1 PDFDocument4 pagesAritmetica Sem 1 PDFJoseph Peñafiel Loayza100% (2)
- AsimetriaDocument3 pagesAsimetriaapple144Pas encore d'évaluation
- Hello MeraryDocument2 pagesHello MeraryMerary ArandaPas encore d'évaluation
- Encuadre Ajp 2023 - 2024Document3 pagesEncuadre Ajp 2023 - 2024Heron HerreraPas encore d'évaluation
- LOPJ EstructuraDocument10 pagesLOPJ EstructuraJorge MartinezPas encore d'évaluation
- Sinopsis Del Género Prestonia en EcuadorDocument9 pagesSinopsis Del Género Prestonia en EcuadorMario Junior Zegarra VásquezPas encore d'évaluation