Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Multiple Linear RegressionDocument26 pagesMultiple Linear RegressionMarlene G Padigos100% (2)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Sysmex HemostasisDocument11 pagesSysmex HemostasisElyza L. de GuzmanPas encore d'évaluation
- 1 Mark QuestionsDocument8 pages1 Mark QuestionsPhani Chintu100% (2)
- The John Molson School of Business MBA 607 Final Exam June 2013 (100 MARKS)Document10 pagesThe John Molson School of Business MBA 607 Final Exam June 2013 (100 MARKS)aicellPas encore d'évaluation
- Oldham Rules V3Document12 pagesOldham Rules V3DarthFooPas encore d'évaluation
- Hydrogen Peroxide DripDocument13 pagesHydrogen Peroxide DripAya100% (1)
- Adm Best Practices Guide: Version 2.0 - November 2020Document13 pagesAdm Best Practices Guide: Version 2.0 - November 2020Swazon HossainPas encore d'évaluation
- Papadakos PHD 2013Document203 pagesPapadakos PHD 2013Panagiotis PapadakosPas encore d'évaluation
- TypeFinderReport ENFPDocument10 pagesTypeFinderReport ENFPBassant AdelPas encore d'évaluation
- Management Strategy CH 2Document37 pagesManagement Strategy CH 2Meishera Panglipurjati SaragihPas encore d'évaluation
- Contracts 2 Special ContractsDocument11 pagesContracts 2 Special ContractsAbhikaamPas encore d'évaluation
- WPhO (Singapore) - World Physics Olympiad (WPhO) - 2011Document20 pagesWPhO (Singapore) - World Physics Olympiad (WPhO) - 2011GXGGXG50% (2)
- 2022 Drik Panchang Hindu FestivalsDocument11 pages2022 Drik Panchang Hindu FestivalsBikash KumarPas encore d'évaluation
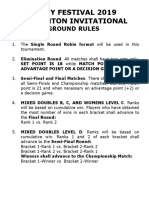
- Ground Rules 2019Document3 pagesGround Rules 2019Jeremiah Miko LepasanaPas encore d'évaluation
- August Strindberg's ''A Dream Play'', inDocument11 pagesAugust Strindberg's ''A Dream Play'', inİlker NicholasPas encore d'évaluation
- Far Eastern University-Institute of Nursing In-House NursingDocument25 pagesFar Eastern University-Institute of Nursing In-House Nursingjonasdelacruz1111Pas encore d'évaluation
- DigoxinDocument18 pagesDigoxinApril Mergelle LapuzPas encore d'évaluation
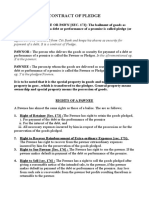
- Contract of PledgeDocument4 pagesContract of Pledgeshreya patilPas encore d'évaluation
- Jordana Wagner Leadership Inventory Outcome 2Document22 pagesJordana Wagner Leadership Inventory Outcome 2api-664984112Pas encore d'évaluation
- DELA CRUZ - LAC 1 - 002 - Individual Learning Monitoring Plan - Bugtongnapulo INHSDocument2 pagesDELA CRUZ - LAC 1 - 002 - Individual Learning Monitoring Plan - Bugtongnapulo INHSGilbert Dela CruzPas encore d'évaluation
- Survey Results Central Zone First LinkDocument807 pagesSurvey Results Central Zone First LinkCrystal Nicca ArellanoPas encore d'évaluation
- Spisak Gledanih Filmova Za 2012Document21 pagesSpisak Gledanih Filmova Za 2012Mirza AhmetovićPas encore d'évaluation
- Modern DrmaDocument7 pagesModern DrmaSHOAIBPas encore d'évaluation
- Rita Ora - Shine Ya LightDocument4 pagesRita Ora - Shine Ya LightkatparaPas encore d'évaluation
- History of Drugs (Autosaved)Document68 pagesHistory of Drugs (Autosaved)Juan TowTowPas encore d'évaluation
- Public Service Media in The Networked Society Ripe 2017 PDFDocument270 pagesPublic Service Media in The Networked Society Ripe 2017 PDFTriszt Tviszt KapitányPas encore d'évaluation
- An Analysis of The PoemDocument2 pagesAn Analysis of The PoemDayanand Gowda Kr100% (2)
- Delaware Met CSAC Initial Meeting ReportDocument20 pagesDelaware Met CSAC Initial Meeting ReportKevinOhlandtPas encore d'évaluation
- Los Documentos de La Dictadura Que Entregó Estados Unidos (Parte 2)Document375 pagesLos Documentos de La Dictadura Que Entregó Estados Unidos (Parte 2)Todo NoticiasPas encore d'évaluation
- Intrauterine Growth RestrictionDocument5 pagesIntrauterine Growth RestrictionColleen MercadoPas encore d'évaluation