Vous aimerez peut-être aussi
- Tarea 2 Control AnalogoDocument23 pagesTarea 2 Control Analogooswaldo perciaPas encore d'évaluation
- 203041A 764 Fase2 "Consolidado"Document17 pages203041A 764 Fase2 "Consolidado"Esneyder QuevedoPas encore d'évaluation
- Tarea 3 Cesar Sanchez Grupo 67Document18 pagesTarea 3 Cesar Sanchez Grupo 67andresPas encore d'évaluation
- EdwinRuiz - Tarea 3 - Análisis en El Dominio Del TiempoDocument15 pagesEdwinRuiz - Tarea 3 - Análisis en El Dominio Del Tiempovictor alfonso jaimes torresPas encore d'évaluation
- Tarea 1 Ronald GarzonDocument12 pagesTarea 1 Ronald GarzonRonaldo GarziaPas encore d'évaluation
- Fase - 4 - FINAL SEÑALES y SISTEMAS COMPLETODocument29 pagesFase - 4 - FINAL SEÑALES y SISTEMAS COMPLETODeimy TorresPas encore d'évaluation
- Mapa Mental Jardin de Newton - DrawioDocument1 pageMapa Mental Jardin de Newton - DrawioJhon RojasPas encore d'évaluation
- Unidad2 Jhonathan SernaDocument17 pagesUnidad2 Jhonathan SernaJhonatan Serna100% (1)
- Paso3 Carlos - Manuel.diazDocument9 pagesPaso3 Carlos - Manuel.diazcarlosPas encore d'évaluation
- Ejercicio 1,2,3,4,5 - JuliorDocument11 pagesEjercicio 1,2,3,4,5 - JuliorErwin CardonaPas encore d'évaluation
- Grupo - 2 Paso 2Document14 pagesGrupo - 2 Paso 2Daniel Andres Garcia DelgadilloPas encore d'évaluation
- Tarea 4 SoftwareingDocument24 pagesTarea 4 SoftwareingAlejandro Gonzalez RicoPas encore d'évaluation
- Tarea 3. Implementar Un Sistema de Instrumentación Con Visualización LedDocument9 pagesTarea 3. Implementar Un Sistema de Instrumentación Con Visualización LedJuan David GómezPas encore d'évaluation
- Control Analogo Deivi Fase 2Document19 pagesControl Analogo Deivi Fase 2DEIVI MARIAPas encore d'évaluation
- Fase 1 - Reconocimiento de Sistemas de Numeración y Simplificación de Funciones Lógicas - OscarDocument20 pagesFase 1 - Reconocimiento de Sistemas de Numeración y Simplificación de Funciones Lógicas - OscaroscarPas encore d'évaluation
- Guia de Actividades Etapa 3 Analizar Comportamiento Transitorio y Estacionario de Sistemas en Dominio de La FrecuenciaDocument9 pagesGuia de Actividades Etapa 3 Analizar Comportamiento Transitorio y Estacionario de Sistemas en Dominio de La FrecuenciaWurgensen Mauricio Quintero GalvisPas encore d'évaluation
- Tarea 4 Grupo 7 ElectronicaDocument34 pagesTarea 4 Grupo 7 ElectronicaKaren RoaPas encore d'évaluation
- BORRADORDocument11 pagesBORRADORFabian TorresPas encore d'évaluation
- Tarea 2 Fisica Moderna V1Document4 pagesTarea 2 Fisica Moderna V1Claudio Santiago Condor Diestra0% (1)
- Evaluacion FinalDocument7 pagesEvaluacion FinalOmar GomezPas encore d'évaluation
- Fase - 2 - Analisis de CircuitosDocument16 pagesFase - 2 - Analisis de CircuitosBrayam Martínez PerdomoPas encore d'évaluation
- Tarea 2Document8 pagesTarea 2Jeyder Fonseca100% (1)
- Tarea1 Grupo 23Document67 pagesTarea1 Grupo 23Pablo YoannyPas encore d'évaluation
- Trabajo Colaborativo Unidad 3Document6 pagesTrabajo Colaborativo Unidad 3SoteloAndresPas encore d'évaluation
- Tarea 3 - Grupal 7Document39 pagesTarea 3 - Grupal 7cristian camilo contreras diazPas encore d'évaluation
- Pre-Tarea Microprocesadores UNADDocument5 pagesPre-Tarea Microprocesadores UNADfelipe sanchezPas encore d'évaluation
- Guía para El Desarrollo Del Componente Práctico - Desarrollar El Componente Práctico PresencialDocument26 pagesGuía para El Desarrollo Del Componente Práctico - Desarrollar El Componente Práctico Presencialjohn bernalPas encore d'évaluation
- Actividad 5 - Sustentar Los Temas de Las Unidades 1,2 y 3Document12 pagesActividad 5 - Sustentar Los Temas de Las Unidades 1,2 y 3Bryan BetancourthPas encore d'évaluation
- Fase 1Document4 pagesFase 1Paola TabaresPas encore d'évaluation
- Electronica de PotenciaDocument15 pagesElectronica de PotenciaAndres GarzonPas encore d'évaluation
- Tarea 1 Control AnalogoDocument8 pagesTarea 1 Control AnalogobussinessPas encore d'évaluation
- Practica Laboratorio 1 Electronica AnalogaDocument15 pagesPractica Laboratorio 1 Electronica AnalogaJuan Fernando Castrillon RuizPas encore d'évaluation
- Tarea3 203042 80Document25 pagesTarea3 203042 80jose paezPas encore d'évaluation
- Unidad 2 - Biestables - ResumenDocument30 pagesUnidad 2 - Biestables - Resumennicolas franco CarrizoPas encore d'évaluation
- Ejercicio3 IngElectronicaDocument2 pagesEjercicio3 IngElectronicaJulian Rodríguez100% (1)
- Fase3 Grupo12Document10 pagesFase3 Grupo12Michel Andres Galeano SotoPas encore d'évaluation
- Control Análogo - Tarea 1Document8 pagesControl Análogo - Tarea 1Cam Mcm PvcPas encore d'évaluation
- Fase 4 - Gilbeto RuizDocument15 pagesFase 4 - Gilbeto RuizgilbertoPas encore d'évaluation
- E1 Grupo 243005 32Document30 pagesE1 Grupo 243005 32carlos mancillaPas encore d'évaluation
- TAREA 1 - Cristian Camilo Contreras DiazDocument10 pagesTAREA 1 - Cristian Camilo Contreras Diazcristian camilo contreras diazPas encore d'évaluation
- 8 Tarea 4Document33 pages8 Tarea 4DEIBY DIAZPas encore d'évaluation
- Etapa1 - Haiber Dussán - 16Document11 pagesEtapa1 - Haiber Dussán - 16anys1676Pas encore d'évaluation
- Tarea2 Grupo58Document43 pagesTarea2 Grupo58felipe sanchezPas encore d'évaluation
- Plantilla 3Document6 pagesPlantilla 3Valieth SanchezPas encore d'évaluation
- Trabajo Colaborativo 2 SEÑALES Y SISTEMASDocument10 pagesTrabajo Colaborativo 2 SEÑALES Y SISTEMASJose Luis Orjuela100% (1)
- Cristian Diaz ExperimentacionDocument7 pagesCristian Diaz ExperimentacionCristian DiazPas encore d'évaluation
- Metodologia Tarea4 PDFDocument3 pagesMetodologia Tarea4 PDFhoolmanPas encore d'évaluation
- Paso 33 CarlosHernanBaccaPicónDocument4 pagesPaso 33 CarlosHernanBaccaPicónCarlosParraPas encore d'évaluation
- Conceptos Teóricos - JonathanCarvajalDocument9 pagesConceptos Teóricos - JonathanCarvajalAndres ManosalvaPas encore d'évaluation
- Grupo 13 Fase 2 TransistoresDocument17 pagesGrupo 13 Fase 2 TransistoresANYELO DARIO TOVAR ROAPas encore d'évaluation
- Telecontrol - Sergio ParraDocument6 pagesTelecontrol - Sergio ParraArturo CarlosPas encore d'évaluation
- Aporte-Tarea 3Document12 pagesAporte-Tarea 3Fernando RinconPas encore d'évaluation
- 0 1 2 3 Tarea 4 Componente PracticoDocument47 pages0 1 2 3 Tarea 4 Componente PracticoJorge Fabian Gualtero100% (1)
- Fase1 - Grupo31 Electronica de Pontencia Envio 2 FaseDocument5 pagesFase1 - Grupo31 Electronica de Pontencia Envio 2 Fasediegoraven777Pas encore d'évaluation
- Control Digital Fase 0-J.martinezDocument4 pagesControl Digital Fase 0-J.martinezGeorgeMarrines100% (1)
- Guia Preparación Evaluación 2 CapDocument4 pagesGuia Preparación Evaluación 2 CapMaximiliano Bobadilla SanchezPas encore d'évaluation
- Tarea 1 - Dinámica y Estabilidad de Sistemas ContínuosDocument17 pagesTarea 1 - Dinámica y Estabilidad de Sistemas ContínuosWalter Nicolas Rojas Peñarete100% (4)
- LaplaceDocument15 pagesLaplaceJesús Hurtado IzquierdoPas encore d'évaluation
- Sistema EmbebidoDocument7 pagesSistema Embebidoluisgomezpasion1Pas encore d'évaluation
- Hiperbola PDFDocument12 pagesHiperbola PDFgacosta385242Pas encore d'évaluation
- B Ga 11 Vector Normal y Plano TangenteDocument3 pagesB Ga 11 Vector Normal y Plano TangenteantherescPas encore d'évaluation
- ICER Atlantico2014 PDFDocument121 pagesICER Atlantico2014 PDFluisgomezpasion1Pas encore d'évaluation
- Respuesta Temporal Sistemas de Segundo OrdenDocument2 pagesRespuesta Temporal Sistemas de Segundo Ordenluisgomezpasion1Pas encore d'évaluation
- Respuesta Temporal Segundo OrdenDocument10 pagesRespuesta Temporal Segundo OrdenlupoecuPas encore d'évaluation
- Cuaderno de Ejercicios 2012 r01Document36 pagesCuaderno de Ejercicios 2012 r01Erick Rojas RománPas encore d'évaluation
- Control Analogico Etapa 1Document23 pagesControl Analogico Etapa 1luisgomezpasion1Pas encore d'évaluation
- Fase 3 Presentacion Diapositiva Servicio SocialDocument19 pagesFase 3 Presentacion Diapositiva Servicio Socialluisgomezpasion1Pas encore d'évaluation
- Ejercicios Fase 1 CompletosDocument6 pagesEjercicios Fase 1 Completosluisgomezpasion1Pas encore d'évaluation
- 00 PresentacionDocument5 pages00 Presentacionluisgomezpasion1Pas encore d'évaluation
- Control Analogico Etapa 1Document23 pagesControl Analogico Etapa 1luisgomezpasion1Pas encore d'évaluation
- 057-045 GLS1 Ln080aDocument34 pages057-045 GLS1 Ln080aPedro BortotPas encore d'évaluation
- ManualDocument82 pagesManualJose Jo100% (12)
- Paso5 Luis GomezDocument13 pagesPaso5 Luis Gomezluisgomezpasion1Pas encore d'évaluation
- IntegralDocument36 pagesIntegralOscar A. Galeano RiosPas encore d'évaluation
- Ver Anexo-Guía de Actividades y Rubrica de Evaluación Unidad 2 Fase 3 - Trabajo Práctico y Cuestionario CerradoDocument1 pageVer Anexo-Guía de Actividades y Rubrica de Evaluación Unidad 2 Fase 3 - Trabajo Práctico y Cuestionario Cerradoluisgomezpasion1Pas encore d'évaluation
- VLT MitsubichiDocument0 pageVLT Mitsubichibenjafran100% (1)
- Dolor Lumbar y RadiculopatiaDocument27 pagesDolor Lumbar y Radiculopatialuisgomezpasion1Pas encore d'évaluation
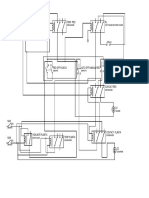
- Transferencia 220 Vac Con RelevosDocument1 pageTransferencia 220 Vac Con Relevosluisgomezpasion1Pas encore d'évaluation
- Dimensión de Un Espacio VectorialDocument12 pagesDimensión de Un Espacio Vectorialluisgomezpasion1Pas encore d'évaluation
- Trabajo Colaborativo Fase2 Grupo 134Document9 pagesTrabajo Colaborativo Fase2 Grupo 134luisgomezpasion1Pas encore d'évaluation
- Ficha 3 Los Navegadores 4 GradoDocument2 pagesFicha 3 Los Navegadores 4 Gradojonathan AtalayaPas encore d'évaluation
- Métodos de Factorizacion 1 para Tercero de SecundariaDocument7 pagesMétodos de Factorizacion 1 para Tercero de SecundariaYeny PilcoPas encore d'évaluation
- Informe de ConcretoDocument14 pagesInforme de ConcretoyeserPas encore d'évaluation
- Manual de Usuario: WWW - Viceroysmartpro.EsDocument13 pagesManual de Usuario: WWW - Viceroysmartpro.Esjules.mottttePas encore d'évaluation
- ResumenDocument5 pagesResumenjose cortesPas encore d'évaluation
- Coriolis - Hoja PersonajeDocument2 pagesCoriolis - Hoja PersonajeKillermanPas encore d'évaluation
- SST-F-001 Permiso en Alturas v2Document15 pagesSST-F-001 Permiso en Alturas v2EstefaniaPas encore d'évaluation
- Lista de Precios VENTA ACTUALIZADA - 095000Document14 pagesLista de Precios VENTA ACTUALIZADA - 095000Alverto Brian HernadezPas encore d'évaluation
- Caso Practico Corte de Ingles Modulo 1Document5 pagesCaso Practico Corte de Ingles Modulo 1Maria Jose ChiriguayaPas encore d'évaluation
- La Ti y Las Ventajas CompetitivasDocument14 pagesLa Ti y Las Ventajas CompetitivasLUCERO MELINA COSME INOCENTEPas encore d'évaluation
- 67.24-U3 - 2020 - Piping - BombasDocument57 pages67.24-U3 - 2020 - Piping - BombasjorgeerrazquinPas encore d'évaluation
- ETR-PAG - Respuesta A Observaciones Inst FaenasDocument19 pagesETR-PAG - Respuesta A Observaciones Inst FaenasAriel GarciaPas encore d'évaluation
- Cuadro Tarea 4.2Document1 pageCuadro Tarea 4.2manuel PeñaPas encore d'évaluation
- Compendio Proyectos GTE Construccion Enero 2022Document128 pagesCompendio Proyectos GTE Construccion Enero 2022LUCIO QUIROZ MILLAPas encore d'évaluation
- DPRN3 U3 A1 DaprDocument9 pagesDPRN3 U3 A1 DaprDaniel PinedaPas encore d'évaluation
- Indicadores de MantenimientoDocument7 pagesIndicadores de MantenimientoStephanny Cedeño VázquezPas encore d'évaluation
- Estado de Cuenta AH CR93015202001312577982Document4 pagesEstado de Cuenta AH CR93015202001312577982Deybbi Jimenez SolanoPas encore d'évaluation
- MONOGRAFIA DE Microprocesadores M..CDocument6 pagesMONOGRAFIA DE Microprocesadores M..CRossy AguilarPas encore d'évaluation
- Calidad de La Administración Pública en El PerúDocument10 pagesCalidad de La Administración Pública en El PerútitoPas encore d'évaluation
- Certificado 2021 07 09Document1 pageCertificado 2021 07 09eivan mendozaPas encore d'évaluation
- AA4 - Lógica Matemática y de ProgramaciónDocument5 pagesAA4 - Lógica Matemática y de Programaciónerick_coPas encore d'évaluation
- 01 Memoria Descriptiva CanalDocument22 pages01 Memoria Descriptiva CanalDaniel Ortega CotrinaPas encore d'évaluation
- Entrada Morat AlanDocument1 pageEntrada Morat AlanMarii SanchezPas encore d'évaluation
- Tema - Técnica McmasterDocument3 pagesTema - Técnica McmasterMarilys Rendón100% (2)
- Análisis - Árbol de DecisionesDocument31 pagesAnálisis - Árbol de DecisionesJoaquin AguirrePas encore d'évaluation
- 2020-1 1 Primer Examen Parcial de Fluidos G3Document7 pages2020-1 1 Primer Examen Parcial de Fluidos G3IVAN CLAUDIO MAZA MEJIAPas encore d'évaluation
- Escenario 3 Versión Definitiva (1) - 1Document6 pagesEscenario 3 Versión Definitiva (1) - 1Juan Fernández SánchezPas encore d'évaluation
- Como Instalar Oracle 11GDocument16 pagesComo Instalar Oracle 11GtrucoswebPas encore d'évaluation
- Estado de Cuenta en LineaDocument9 pagesEstado de Cuenta en LineaAlexander BordaPas encore d'évaluation
- Pp1 - Mezcla Gaseosa IdealDocument69 pagesPp1 - Mezcla Gaseosa IdealLUIS FERNANDO MARTINEZ PRICEPas encore d'évaluation