Vous aimerez peut-être aussi
- Meta 86Document13 pagesMeta 86Compu RedPas encore d'évaluation
- Chipulina PL PDFDocument186 pagesChipulina PL PDFPedro Kennedy Sanchez AgapitoPas encore d'évaluation
- Os Meta 29 - 2022Document5 pagesOs Meta 29 - 2022Compu RedPas encore d'évaluation
- Meta 44Document15 pagesMeta 44Compu RedPas encore d'évaluation
- Plan Al Bicentenario - Sin Corrupción - Pedro CastilloDocument17 pagesPlan Al Bicentenario - Sin Corrupción - Pedro CastilloConvocaRedesPas encore d'évaluation
- Trabajo de Abastecimientos de Agua y AlcantarilladoDocument5 pagesTrabajo de Abastecimientos de Agua y AlcantarilladoCompu RedPas encore d'évaluation
- Oc Meta 29 - 2022Document13 pagesOc Meta 29 - 2022Compu RedPas encore d'évaluation
- Meta 2 OcDocument21 pagesMeta 2 OcCompu RedPas encore d'évaluation
- Taller ReservorioDocument19 pagesTaller ReservorioCompu RedPas encore d'évaluation
- Juris Oo - Aduanas 2019Document4 pagesJuris Oo - Aduanas 2019Carmen FlavizPas encore d'évaluation
- Pags 36-40 Informe Especial ContableDocument5 pagesPags 36-40 Informe Especial ContableCompu RedPas encore d'évaluation
- FOTOCOPIADORADocument5 pagesFOTOCOPIADORACompu RedPas encore d'évaluation
- Ejercicio 1Document3 pagesEjercicio 1Compu RedPas encore d'évaluation
- Darsy Mecánica de Fluidos 2Document24 pagesDarsy Mecánica de Fluidos 2Compu RedPas encore d'évaluation
- Horometro de G.EDocument2 pagesHorometro de G.ECompu RedPas encore d'évaluation
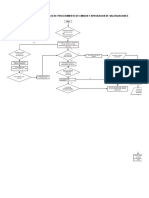
- Diagrama de FlujoDocument5 pagesDiagrama de FlujoCompu RedPas encore d'évaluation
- Metodo Area de Momentos Teoria y EjerciciosDocument15 pagesMetodo Area de Momentos Teoria y EjerciciosCompu RedPas encore d'évaluation
- PRESENTACION9Document21 pagesPRESENTACION9Distel Moscoso CamposPas encore d'évaluation
- Sistemas Complejos de TuberíasDocument16 pagesSistemas Complejos de TuberíasCompu RedPas encore d'évaluation
- DELITOS LaboralesDocument16 pagesDELITOS LaboralesCompu RedPas encore d'évaluation
- Aditivos para El ConcretoDocument30 pagesAditivos para El ConcretoYohama Durand TJPas encore d'évaluation
- Practica 3Document3 pagesPractica 3Compu RedPas encore d'évaluation
- Informe Tecnico de Topografia IiDocument17 pagesInforme Tecnico de Topografia IiCompu RedPas encore d'évaluation
- 1aspectos GeneralesDocument16 pages1aspectos GeneralesCompu RedPas encore d'évaluation
- Darsy Mecánica de Fluidos 2Document24 pagesDarsy Mecánica de Fluidos 2Compu RedPas encore d'évaluation
- Texto Ejercicios Resueltos de Hidraulica 1 Nelame 120912Document129 pagesTexto Ejercicios Resueltos de Hidraulica 1 Nelame 120912Nestor Javier Lanza Mejia83% (12)
- Texto Ejercicios Resueltos de Hidraulica 1 Nelame 120912Document129 pagesTexto Ejercicios Resueltos de Hidraulica 1 Nelame 120912Nestor Javier Lanza Mejia83% (12)
- 01 Informe Topografía PTPASDocument11 pages01 Informe Topografía PTPASEnoc FrancisPas encore d'évaluation
- Problemas HidraulicaDocument7 pagesProblemas HidraulicaCompu RedPas encore d'évaluation
- Formulario EdDocument18 pagesFormulario EdElsa PérezPas encore d'évaluation
- SimulacionesDocument5 pagesSimulacionesJavier Ruíz PalafoxPas encore d'évaluation
- 7 Modelo ProbabilisticoDocument5 pages7 Modelo ProbabilisticoJose Manuel Quispe RiveraPas encore d'évaluation
- Cocientes NotablesDocument6 pagesCocientes NotablesAnonymous r4YxJzeHIAPas encore d'évaluation
- Serie de LaurentDocument6 pagesSerie de LaurentErick AlexanderPas encore d'évaluation
- Solucio N Examen Final Metodos NumericosDocument2 pagesSolucio N Examen Final Metodos NumericosNataliaVegaMolanoPas encore d'évaluation
- Momento de Aprendizaje 1Document6 pagesMomento de Aprendizaje 1Lex said Pernett CaballeroPas encore d'évaluation
- Tema 1 Ecuaciones Diferenciales de Primer OrdenDocument40 pagesTema 1 Ecuaciones Diferenciales de Primer OrdenLeonardPas encore d'évaluation
- Problemas y AlgoritmosDocument8 pagesProblemas y Algoritmosalfonso8619Pas encore d'évaluation
- Tarea2 Juan AyalaDocument16 pagesTarea2 Juan AyalaJuan camilo Ayala botiaPas encore d'évaluation
- Teoria de Anillos (I-1) - Emilio Lluis PueblaDocument6 pagesTeoria de Anillos (I-1) - Emilio Lluis PueblaItzalá Mendoza0% (1)
- Guìa de Geometrìa Grado Octavo, Tercer Periodo SE (Andrés Yánez) .Document4 pagesGuìa de Geometrìa Grado Octavo, Tercer Periodo SE (Andrés Yánez) .Andrés YánezPas encore d'évaluation
- CAPITULO No 4 - DIFERENCIAL TOTAL Y VALORES APROXIMADOSDocument8 pagesCAPITULO No 4 - DIFERENCIAL TOTAL Y VALORES APROXIMADOSKevin Freddy Poma QuispePas encore d'évaluation
- Simulación de ÓrbitasDocument11 pagesSimulación de Órbitasveritoa450% (1)
- Diseño de Controladores PI y PD Por El Método de Lugar Geométrico de La RaícesDocument8 pagesDiseño de Controladores PI y PD Por El Método de Lugar Geométrico de La Raícesguillermo gaitanPas encore d'évaluation
- Tarea 1 - Mateo SogamosoDocument26 pagesTarea 1 - Mateo SogamosoMateo SogaPas encore d'évaluation
- Primer TPCC Wa Matba 2019 2 v1Document2 pagesPrimer TPCC Wa Matba 2019 2 v1Luis Enrique Villacorta Calle100% (1)
- Regresión ParabólicaDocument5 pagesRegresión ParabólicaJhsi7100% (2)
- El EXADEPDocument11 pagesEl EXADEPkhadija_Álvarez_1Pas encore d'évaluation
- Silabo MAT Basica UPNDocument2 pagesSilabo MAT Basica UPNMelanie Román100% (3)
- LA RETÓRICA DE LA CIENCIA - Robert FluddDocument21 pagesLA RETÓRICA DE LA CIENCIA - Robert FluddFelipe Aguirre100% (1)
- Semana 10.aritmeticaDocument9 pagesSemana 10.aritmeticaErnestoLazaroGomeroPas encore d'évaluation
- 2 T de Laplace - Uac-3Document17 pages2 T de Laplace - Uac-3Gonzalo Sanchez CarmonaPas encore d'évaluation
- 178-179 Integral 2010-1 Con Respuestas PDFDocument11 pages178-179 Integral 2010-1 Con Respuestas PDFFranklin ColinaPas encore d'évaluation
- Sistema de Numeración en Base 3Document4 pagesSistema de Numeración en Base 3Abraham GarciaPas encore d'évaluation
- 6° GradoDocument8 pages6° Gradohugo_castrillon_2Pas encore d'évaluation
- Álgebra 5° Sec - Semana 38 y 39 - Repaso BimestralDocument15 pagesÁlgebra 5° Sec - Semana 38 y 39 - Repaso Bimestralnadia reyesPas encore d'évaluation
- Geometria Descriptiva 2Document17 pagesGeometria Descriptiva 2Anonymous aMhOLhkrjPas encore d'évaluation
- Taller Series y SucesionesDocument3 pagesTaller Series y SucesionesisaacPas encore d'évaluation