Vous aimerez peut-être aussi
- CS 601 PDFDocument7 pagesCS 601 PDFbasualok@rediffmail.comPas encore d'évaluation
- Operating SystemsDocument150 pagesOperating Systemsbasualok@rediffmail.comPas encore d'évaluation
- QP IT605C Compiler DesignDocument7 pagesQP IT605C Compiler Designbasualok@rediffmail.comPas encore d'évaluation
- It 795 PDFDocument1 pageIt 795 PDFbasualok@rediffmail.comPas encore d'évaluation
- CS 2007 UnsolvedDocument19 pagesCS 2007 UnsolvedrishabhPas encore d'évaluation
- Os 23Document49 pagesOs 23basualok@rediffmail.comPas encore d'évaluation
- Analysis of Algorithms I: Minimum Spanning Tree: Xi ChenDocument25 pagesAnalysis of Algorithms I: Minimum Spanning Tree: Xi Chenbasualok@rediffmail.comPas encore d'évaluation
- Train Name Index PDFDocument15 pagesTrain Name Index PDFreach_arindomPas encore d'évaluation
- Tune Song1 PDFDocument2 pagesTune Song1 PDFbasualok@rediffmail.comPas encore d'évaluation
- 2005 1 PDFDocument12 pages2005 1 PDFbasualok@rediffmail.comPas encore d'évaluation
- Operating System ObjectiveDocument5 pagesOperating System Objectivebasualok@rediffmail.comPas encore d'évaluation
- The Prediction of Sale Time Series by Artificial Neural NetworkDocument4 pagesThe Prediction of Sale Time Series by Artificial Neural Networkbasualok@rediffmail.comPas encore d'évaluation
- Nayan Bhara Jal Go Tomar PDFDocument2 pagesNayan Bhara Jal Go Tomar PDFbasualok@rediffmail.comPas encore d'évaluation
- DM HomeWork1Document3 pagesDM HomeWork1basualok@rediffmail.comPas encore d'évaluation
- Nayan Bhara Jal Go TomarDocument2 pagesNayan Bhara Jal Go Tomarbasualok@rediffmail.comPas encore d'évaluation
- GATE Computer Science 2009 AnswersDocument4 pagesGATE Computer Science 2009 AnswersJitendra SinghPas encore d'évaluation
- Good Material OSDocument103 pagesGood Material OSKarthik SekharPas encore d'évaluation
- Evaluation Guidelines Tier II v0Document27 pagesEvaluation Guidelines Tier II v0HarminderSingh BindraPas encore d'évaluation
- Evaluation Guidelines Tier II v0Document27 pagesEvaluation Guidelines Tier II v0HarminderSingh BindraPas encore d'évaluation
- VisionDocument1 pageVisionbasualok@rediffmail.comPas encore d'évaluation
- Gate Os 2 2017Document50 pagesGate Os 2 2017basualok@rediffmail.comPas encore d'évaluation
- Height of TreeDocument1 pageHeight of Treebasualok@rediffmail.comPas encore d'évaluation
- Tune Song1 PDFDocument2 pagesTune Song1 PDFbasualok@rediffmail.comPas encore d'évaluation
- PHD Entrance Sample PaperDocument6 pagesPHD Entrance Sample Paperbasualok@rediffmail.comPas encore d'évaluation
- New York State Recommended Childhood and Adolescent Immunization ScheduleDocument1 pageNew York State Recommended Childhood and Adolescent Immunization Schedulecbs6albanyPas encore d'évaluation
- DM 2013Document7 pagesDM 2013basualok@rediffmail.comPas encore d'évaluation
- MCQ Cryp NW SecurityDocument1 pageMCQ Cryp NW Securitybasualok@rediffmail.comPas encore d'évaluation
- Dbms HTTPDocument1 pageDbms HTTPbasualok@rediffmail.comPas encore d'évaluation
- SQL 1Document1 pageSQL 1basualok@rediffmail.comPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 7 - Monte-Carlo-Simulation With XL STAT - English GuidelineDocument8 pages7 - Monte-Carlo-Simulation With XL STAT - English GuidelineGauravShelkePas encore d'évaluation
- Load Chart Crane LiftingDocument25 pagesLoad Chart Crane LiftingLauren'sclub EnglishBimbel Sd-sma100% (1)
- L GSR ChartsDocument16 pagesL GSR ChartsEmerald GrPas encore d'évaluation
- Dog & Kitten: XshaperDocument17 pagesDog & Kitten: XshaperAll PrintPas encore d'évaluation
- Types of Chemical Reactions: Synthesis and DecompositionDocument3 pagesTypes of Chemical Reactions: Synthesis and DecompositionAlan MartínPas encore d'évaluation
- Marking Scheme For Term 2 Trial Exam, STPM 2019 (Gbs Melaka) Section A (45 Marks)Document7 pagesMarking Scheme For Term 2 Trial Exam, STPM 2019 (Gbs Melaka) Section A (45 Marks)Michelles JimPas encore d'évaluation
- Principled Instructions Are All You Need For Questioning LLaMA-1/2, GPT-3.5/4Document24 pagesPrincipled Instructions Are All You Need For Questioning LLaMA-1/2, GPT-3.5/4Jeremias GordonPas encore d'évaluation
- Importance of Porosity - Permeability Relationship in Sandstone Petrophysical PropertiesDocument61 pagesImportance of Porosity - Permeability Relationship in Sandstone Petrophysical PropertiesjrtnPas encore d'évaluation
- 2013-01-28 203445 International Fault Codes Eges350 DTCDocument8 pages2013-01-28 203445 International Fault Codes Eges350 DTCVeterano del CaminoPas encore d'évaluation
- KIA SONET BookingDocketDocument7 pagesKIA SONET BookingDocketRajesh ThulasiramPas encore d'évaluation
- CE162P MODULE 2 LECTURE 4 Analysis & Design of Mat FoundationDocument32 pagesCE162P MODULE 2 LECTURE 4 Analysis & Design of Mat FoundationPROSPEROUS LUCKILYPas encore d'évaluation
- Atomberg Gorilla FanDocument12 pagesAtomberg Gorilla FanjothamPas encore d'évaluation
- Puma PypDocument20 pagesPuma PypPrashanshaBahetiPas encore d'évaluation
- Transfert de Chaleur AngDocument10 pagesTransfert de Chaleur Angsouhir gritliPas encore d'évaluation
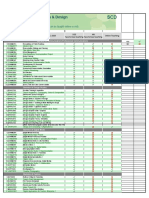
- SCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Document2 pagesSCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Nguyễn Hồng AnhPas encore d'évaluation
- For Accuracy and Safety: Globally ApprovedDocument4 pagesFor Accuracy and Safety: Globally ApprovedPedro LopesPas encore d'évaluation
- Rankine-Froude Model: Blade Element Momentum Theory Is A Theory That Combines BothDocument111 pagesRankine-Froude Model: Blade Element Momentum Theory Is A Theory That Combines BothphysicsPas encore d'évaluation
- Functions of Theory in ResearchDocument2 pagesFunctions of Theory in ResearchJomariMolejonPas encore d'évaluation
- Wine TourismDocument9 pagesWine Tourismyarashovanilufar1999Pas encore d'évaluation
- (EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing SteelDocument24 pages(EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing Steelbagusu_6Pas encore d'évaluation
- Executive Summary: 2013 Edelman Trust BarometerDocument12 pagesExecutive Summary: 2013 Edelman Trust BarometerEdelman100% (4)
- Ficha Tecnica Bomba Inyeccion MiniFlex EDocument1 pageFicha Tecnica Bomba Inyeccion MiniFlex Ejohn frader arrubla50% (2)
- Naval TV SystemDocument24 pagesNaval TV Systemsharmasandeep0010Pas encore d'évaluation
- Bridge Over BrahmaputraDocument38 pagesBridge Over BrahmaputraRahul DevPas encore d'évaluation
- Assignment: Residual Leakage Protection Circuit Circuit DiagramDocument2 pagesAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaPas encore d'évaluation
- TM Mic Opmaint EngDocument186 pagesTM Mic Opmaint Engkisedi2001100% (2)
- FIR FliterDocument10 pagesFIR FliterasfsfsafsafasPas encore d'évaluation
- Engineering Ethics in Practice ShorterDocument79 pagesEngineering Ethics in Practice ShorterPrashanta NaikPas encore d'évaluation
- Audi A4-7Document532 pagesAudi A4-7Anonymous QRVqOsa5Pas encore d'évaluation
- EPW, Vol.58, Issue No.44, 04 Nov 2023Document66 pagesEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeasePas encore d'évaluation