Vous aimerez peut-être aussi
- Ericsson Product Training: Rahul KansalDocument83 pagesEricsson Product Training: Rahul KansalThinley Wangmo100% (1)
- An Introduction To GNSSDocument99 pagesAn Introduction To GNSSjustine john acabal100% (1)
- Chapter 5 - Introduction To GPS, GIS and Remote SensingDocument88 pagesChapter 5 - Introduction To GPS, GIS and Remote SensingABAMELAPas encore d'évaluation
- D06-04 KnippersPPTeachingDocument45 pagesD06-04 KnippersPPTeachingUNNATI AGRAWALPas encore d'évaluation
- Satellite Navigation (GPS)Document28 pagesSatellite Navigation (GPS)NAJA MOHAMEDPas encore d'évaluation
- GPS 2003Document182 pagesGPS 2003أحمد العبودPas encore d'évaluation
- Dgps Survey For BWDBDocument34 pagesDgps Survey For BWDBShafiqul HasanPas encore d'évaluation
- Satellite Navigation: GeodesyDocument8 pagesSatellite Navigation: Geodesykallu mamaPas encore d'évaluation
- Gnss SD TcasDocument33 pagesGnss SD TcasFahmi RamadhanPas encore d'évaluation
- MODULE 7 - Satellite Navigation Systems GPS GLONASS DGPSDocument64 pagesMODULE 7 - Satellite Navigation Systems GPS GLONASS DGPSgavin.vedder1980Pas encore d'évaluation
- Introduction To The GPSDocument31 pagesIntroduction To The GPSarjunr1991100% (3)
- GPS (Globalni Pozicioni Sistemi) : GPS Kratka Istorija GPSDocument10 pagesGPS (Globalni Pozicioni Sistemi) : GPS Kratka Istorija GPSsdmitarPas encore d'évaluation
- GPS - Global Positioning SystemDocument19 pagesGPS - Global Positioning SystemS Bharadwaj ReddyPas encore d'évaluation
- Principle of Functioning of DGPS & ETSDocument64 pagesPrinciple of Functioning of DGPS & ETSseshukvs100% (1)
- GE186_Lecture 5-Introduction to GNSS1Document63 pagesGE186_Lecture 5-Introduction to GNSS1Edward Gabada JnrPas encore d'évaluation
- Using GPS for accurate GIS data captureDocument13 pagesUsing GPS for accurate GIS data capturehiwot ytayewPas encore d'évaluation
- Global Positioning SystemDocument16 pagesGlobal Positioning SystemH R VALAPas encore d'évaluation
- Satellite Navigation Systems ExplainedDocument144 pagesSatellite Navigation Systems ExplainedEreN100% (1)
- Global Positioning System: AbstractDocument7 pagesGlobal Positioning System: Abstractasjad12Pas encore d'évaluation
- A Seminar Report ON: in Electronics and Communication Engineering by Ramakrishna Raju.M 08D15A0409Document21 pagesA Seminar Report ON: in Electronics and Communication Engineering by Ramakrishna Raju.M 08D15A0409Ramakrishna RajuPas encore d'évaluation
- The Use of GPS For Biodiversity SurveyDocument28 pagesThe Use of GPS For Biodiversity SurveyYudha OkpriandaPas encore d'évaluation
- Electronic Navigation: Lesson-6a: Satellite NavigationDocument159 pagesElectronic Navigation: Lesson-6a: Satellite NavigationErcan Yüksekyıldız0% (1)
- GPS Global Positioning System: Dr.G.Bhaskaran Senior Lecturer Department of Geography University of Madras, Chennai-5Document73 pagesGPS Global Positioning System: Dr.G.Bhaskaran Senior Lecturer Department of Geography University of Madras, Chennai-5kalichittillaPas encore d'évaluation
- Notes GpsDocument17 pagesNotes Gpsbooks babuPas encore d'évaluation
- Navigation SistemsDocument16 pagesNavigation SistemsAarón RojasPas encore d'évaluation
- Global Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andDocument3 pagesGlobal Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andram reddyPas encore d'évaluation
- Amdl Intro To GPSDocument29 pagesAmdl Intro To GPSgaurang1111Pas encore d'évaluation
- GPSDocument149 pagesGPSVivek Gill100% (2)
- GPS Notes PDFDocument13 pagesGPS Notes PDFAlok100% (1)
- Navigation With GNSS and IMUDocument4 pagesNavigation With GNSS and IMUTuğrul YazganPas encore d'évaluation
- Elec.Nav_L11_Satellite Nav-GPSDocument152 pagesElec.Nav_L11_Satellite Nav-GPSEmir BilmezPas encore d'évaluation
- Gps (Global Positioning System) : Prof. A. JabeenaDocument40 pagesGps (Global Positioning System) : Prof. A. JabeenaAryan VermaPas encore d'évaluation
- Global Positioning System: Presented by K.Manoj Kumar P.SindhushaDocument18 pagesGlobal Positioning System: Presented by K.Manoj Kumar P.SindhushabadimalamadhuPas encore d'évaluation
- CHAPTER-5 Introduction To GPS SurveyingDocument40 pagesCHAPTER-5 Introduction To GPS Surveyingaduyekirkosu1scribdPas encore d'évaluation
- GPS Basics: How the Global Positioning System WorksDocument29 pagesGPS Basics: How the Global Positioning System WorksSarosh SreenivasanPas encore d'évaluation
- Lecture 4 - Introduction To Global Positioning SystemDocument40 pagesLecture 4 - Introduction To Global Positioning SystembuhlyunbarterPas encore d'évaluation
- What Is GPS?: How It WorksDocument2 pagesWhat Is GPS?: How It WorksBeltous Che ChePas encore d'évaluation
- Faculty of Architecture GpsDocument3 pagesFaculty of Architecture GpsgladysPas encore d'évaluation
- TejuDocument35 pagesTejuTejpal JhajhriaPas encore d'évaluation
- DP Induction - Global Navigation Satellite System (GNSS)Document16 pagesDP Induction - Global Navigation Satellite System (GNSS)Kvartira VilyyamsaPas encore d'évaluation
- GNSS2021Document40 pagesGNSS2021BlaisePas encore d'évaluation
- GPS Basics v.1.6Document81 pagesGPS Basics v.1.6sorbisorbi100% (1)
- Gps Lecture NotesDocument101 pagesGps Lecture NotesRocking ChakravarthyPas encore d'évaluation
- 1.1 What Is GPS?: A. Space SegmentDocument11 pages1.1 What Is GPS?: A. Space SegmentReiger RoyalPas encore d'évaluation
- Introduction To The Global Positioning SystemDocument29 pagesIntroduction To The Global Positioning SystemsaisatinpPas encore d'évaluation
- Presented By: Submitted To: Aman Mahajan Mr. I.J. Bhandola 282003Document29 pagesPresented By: Submitted To: Aman Mahajan Mr. I.J. Bhandola 282003Aman MahajanPas encore d'évaluation
- 7 8 (GPS)Document6 pages7 8 (GPS)Nabeel AhmedPas encore d'évaluation
- Outline: Combining GPS & Cellular Network Measurements For PositioningDocument9 pagesOutline: Combining GPS & Cellular Network Measurements For PositioningMuhammad Niyas N SPas encore d'évaluation
- Sur-Ii U4l1Document3 pagesSur-Ii U4l1Senthamizh SelvanPas encore d'évaluation
- Lecture 1Document54 pagesLecture 1Muhammad FahimPas encore d'évaluation
- A Seminar On GPS: Submitted By: Susheel MathurDocument28 pagesA Seminar On GPS: Submitted By: Susheel MathurSushil MathurPas encore d'évaluation
- Gps Seiet PDFDocument18 pagesGps Seiet PDFAnkit MauryaPas encore d'évaluation
- 8 Data CaptureDocument65 pages8 Data Capturemd abdullahPas encore d'évaluation
- Garmin - What Is GPSDocument3 pagesGarmin - What Is GPSabebotalardyPas encore d'évaluation
- Lec 5-6 LocalizationDocument107 pagesLec 5-6 LocalizationVincent HanPas encore d'évaluation
- GPS OverviewDocument23 pagesGPS Overviewkarna vigneshPas encore d'évaluation
- Assignment Geodesy 1Document11 pagesAssignment Geodesy 1budak_gisPas encore d'évaluation
- GPSDocument35 pagesGPSak721Pas encore d'évaluation
- GPSàDocument24 pagesGPSàSunil PillaiPas encore d'évaluation
- GPS PDFDocument34 pagesGPS PDFDheeraj RanganathPas encore d'évaluation
- Global Positioning Systems, Inertial Navigation, and IntegrationD'EverandGlobal Positioning Systems, Inertial Navigation, and IntegrationÉvaluation : 1 sur 5 étoiles1/5 (1)
- 10 CV 42Document192 pages10 CV 42ShriPas encore d'évaluation
- PDFDocument51 pagesPDFShriPas encore d'évaluation
- Satellite-based positioning principles and applicationsDocument48 pagesSatellite-based positioning principles and applicationsShriPas encore d'évaluation
- A Comparative Study On Mechanical Properties-1035 PDFDocument8 pagesA Comparative Study On Mechanical Properties-1035 PDFShriPas encore d'évaluation
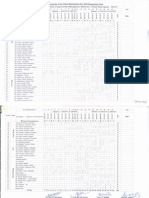
- Supervision Chart SPPU Nov Dec 2017examDocument6 pagesSupervision Chart SPPU Nov Dec 2017examShriPas encore d'évaluation
- J Ring, L Box, U Box & Fill box apparatus specificationsDocument2 pagesJ Ring, L Box, U Box & Fill box apparatus specificationsShriPas encore d'évaluation
- Supervision Chart SPPU Nov Dec 2017examDocument1 pageSupervision Chart SPPU Nov Dec 2017examShriPas encore d'évaluation
- Supervision Chart SPPU Nov Dec 2017exam PDFDocument2 pagesSupervision Chart SPPU Nov Dec 2017exam PDFShriPas encore d'évaluation
- 11 - Chapter 5 PDFDocument14 pages11 - Chapter 5 PDFShriPas encore d'évaluation
- Mixdesignsofself Compactingconcreteusinglocalmaterials PDFDocument10 pagesMixdesignsofself Compactingconcreteusinglocalmaterials PDFShriPas encore d'évaluation
- 11 - Chapter 5 PDFDocument14 pages11 - Chapter 5 PDFShriPas encore d'évaluation
- Revised SIEM Extension Nos List As On DT 12 Sep 2017Document2 pagesRevised SIEM Extension Nos List As On DT 12 Sep 2017ShriPas encore d'évaluation
- Criterion 2 Preparation 20 11 17Document33 pagesCriterion 2 Preparation 20 11 17ShriPas encore d'évaluation
- Ce742lec 25&26Document83 pagesCe742lec 25&26Anshul SoniPas encore d'évaluation
- Corrected Staff List - OdtDocument1 pageCorrected Staff List - OdtShriPas encore d'évaluation
- KKKKDocument1 pageKKKKShriPas encore d'évaluation
- Inviting Proposal For University Research Grant Scheme For Year - 2017-19 - 7112017 PDFDocument16 pagesInviting Proposal For University Research Grant Scheme For Year - 2017-19 - 7112017 PDFShriPas encore d'évaluation
- View TendDocument22 pagesView TendpandianPas encore d'évaluation
- Ban Paper 1 PDFDocument10 pagesBan Paper 1 PDFShriPas encore d'évaluation
- S.E. (Mechanical Sandwich) (Semester - I) Fluid Mechanics and Machinery (2015 Pattern)Document9 pagesS.E. (Mechanical Sandwich) (Semester - I) Fluid Mechanics and Machinery (2015 Pattern)ShriPas encore d'évaluation
- Gamal Elsayed Abdelaziz - Self-Compacting ConcreteDocument51 pagesGamal Elsayed Abdelaziz - Self-Compacting ConcretegregPas encore d'évaluation
- Faculty of Engineering: S.E. (Civil Engineering) 2015 Course at Savitribai Phule Pune UniversityDocument50 pagesFaculty of Engineering: S.E. (Civil Engineering) 2015 Course at Savitribai Phule Pune UniversityShriPas encore d'évaluation
- Koehler Rheology v1Document32 pagesKoehler Rheology v1ShriPas encore d'évaluation
- Courseplan ConcretetechDocument6 pagesCourseplan ConcretetechShriPas encore d'évaluation
- Itsfinalppt 140227130236 Phpapp01 PDFDocument28 pagesItsfinalppt 140227130236 Phpapp01 PDFShriPas encore d'évaluation
- By-Vishva R. Patel (120773106044)Document16 pagesBy-Vishva R. Patel (120773106044)ShriPas encore d'évaluation
- Faculty of Engineering: S.E. (Civil Engineering) 2015 Course at Savitribai Phule Pune UniversityDocument50 pagesFaculty of Engineering: S.E. (Civil Engineering) 2015 Course at Savitribai Phule Pune UniversityShriPas encore d'évaluation
- Repairing IssueDocument16 pagesRepairing IssueMREFAATPas encore d'évaluation
- Topic - "Self Comopacting Concrete" Branch/Sem./Sec. - "Iii/V/B" Department - "Civil EngineeringDocument13 pagesTopic - "Self Comopacting Concrete" Branch/Sem./Sec. - "Iii/V/B" Department - "Civil EngineeringShriPas encore d'évaluation
- TU1208 GPRforeducationaluse November2017 FerraraChizhPietrelliDocument93 pagesTU1208 GPRforeducationaluse November2017 FerraraChizhPietrelliRobel MTPas encore d'évaluation
- BCCH Allocation Frequency List (BA) Radio Network Object Parameters (Double BA Lists)Document4 pagesBCCH Allocation Frequency List (BA) Radio Network Object Parameters (Double BA Lists)alemuPas encore d'évaluation
- 4 1947 3 - and 9-Centimeter Propagation in Low Ocean DuctsDocument15 pages4 1947 3 - and 9-Centimeter Propagation in Low Ocean DuctsAmit GargPas encore d'évaluation
- Distance Measuring Equipment (DME) Is A The DME System Consists of An The Interrogator in The Aircraft TransmitsDocument18 pagesDistance Measuring Equipment (DME) Is A The DME System Consists of An The Interrogator in The Aircraft TransmitsAlex SuarezPas encore d'évaluation
- PLL IC as Communication Building BlockDocument14 pagesPLL IC as Communication Building BlockNitin SoniPas encore d'évaluation
- Q2 - Features - Trials - Nokia LandDocument11 pagesQ2 - Features - Trials - Nokia LandQasim Abbas Alvi100% (1)
- UNIT 2: Telecommunication in ITSDocument129 pagesUNIT 2: Telecommunication in ITSCE Kumar Vinay100% (1)
- Electronics - IJECE - Power Control Techniques in - Komal D BhoiteDocument8 pagesElectronics - IJECE - Power Control Techniques in - Komal D Bhoiteiaset123Pas encore d'évaluation
- MINI-LINK TN Datasheet 2014 PDFDocument2 pagesMINI-LINK TN Datasheet 2014 PDFkonradoaPas encore d'évaluation
- 5G QoS ParametersDocument2 pages5G QoS ParametersChitwan BhardwajPas encore d'évaluation
- Single Band Panel Antenna with Variable TiltDocument5 pagesSingle Band Panel Antenna with Variable TiltcristigoPas encore d'évaluation
- Bladesite and Easymacro (20160308v1.0)Document21 pagesBladesite and Easymacro (20160308v1.0)Tadeo Mayorca FossiPas encore d'évaluation
- 8 Sem Syllabus Bit Sindri EceDocument4 pages8 Sem Syllabus Bit Sindri EceSimaab AmirPas encore d'évaluation
- Parametros Do SiritDocument5 pagesParametros Do SiritwilsonsbtPas encore d'évaluation
- Altec 128bDocument4 pagesAltec 128bonetwondlPas encore d'évaluation
- Multiband Hybrid CouplerDocument2 pagesMultiband Hybrid CouplermajdjasonPas encore d'évaluation
- Telecom Training inDocument42 pagesTelecom Training inNuwan LiyanagePas encore d'évaluation
- II - II Linear Integrated Circuit Analysis Course Plan PDFDocument9 pagesII - II Linear Integrated Circuit Analysis Course Plan PDFshivgnitPas encore d'évaluation
- Compression & Huffman CodesDocument29 pagesCompression & Huffman CodesDipen DekaPas encore d'évaluation
- 15ecc18 - Sensors and ActuatorsDocument1 page15ecc18 - Sensors and Actuatorskamarajme2006Pas encore d'évaluation
- Dual Mode 1GE GEPON ONUDocument4 pagesDual Mode 1GE GEPON ONUrquinterosPas encore d'évaluation
- Functional Description-Hardware Description DataDocument20 pagesFunctional Description-Hardware Description DataToanPas encore d'évaluation
- Noise Generator Datasheet Provides Circuit for Replacing Broken Noise ChipsDocument4 pagesNoise Generator Datasheet Provides Circuit for Replacing Broken Noise Chipsconrad blacksmithPas encore d'évaluation
- RF Transmitter and ReceiverDocument16 pagesRF Transmitter and ReceiverPrafull B100% (1)
- BSC6900V900R012 UO System Structure-20101218-B-V1.0Document99 pagesBSC6900V900R012 UO System Structure-20101218-B-V1.0Dinesh Raja MPas encore d'évaluation
- Equipment List Report: Type Manufactuer Part ID Description Qty Component Group: AntennaDocument1 pageEquipment List Report: Type Manufactuer Part ID Description Qty Component Group: AntennaNuman AminPas encore d'évaluation
- PLL FM Demodulator - DetectorDocument2 pagesPLL FM Demodulator - DetectorJavaid AakhoonPas encore d'évaluation
- Brkopt 2116Document111 pagesBrkopt 2116alfagemeoPas encore d'évaluation
- Enabling Efficient Blockage-Aware Handover in RIS-Assisted Mmwave Cellular NetworksDocument15 pagesEnabling Efficient Blockage-Aware Handover in RIS-Assisted Mmwave Cellular NetworksMichael SamwelPas encore d'évaluation