Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Dynamo - WikipediaDocument13 pagesDynamo - WikipediaIKENNAPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- SDFC AdminDocument8 pagesSDFC AdminYashpal SinghPas encore d'évaluation
- GU Pipette Quick Check ENDocument20 pagesGU Pipette Quick Check ENCeren Alim DavutluoğluPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Licenta - Algoritmi de Rezolvare A Cubului Rubik PDFDocument46 pagesLicenta - Algoritmi de Rezolvare A Cubului Rubik PDFRazvan SavucPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Base Plate and Anchor Rod DesignDocument2 pagesBase Plate and Anchor Rod DesignKannan MurugesanPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Pacom S72724+PDR32-RMT-HYB+ManualDocument130 pagesPacom S72724+PDR32-RMT-HYB+ManualDavidChisholmPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Ricoh Shotmaster ZoomDocument17 pagesRicoh Shotmaster Zoommanana mapplePas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Listprice 07 11Document1 797 pagesListprice 07 11Tejano RockPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Project: Tapis Eor Brownfield Modifications & RetrofitsDocument8 pagesProject: Tapis Eor Brownfield Modifications & RetrofitsMohamad Azizi AzizPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Qualcomm Extensible Diagnostic MonitorDocument2 pagesQualcomm Extensible Diagnostic MonitorGuilherme Pereira0% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Komatsu PC200LC-6Document12 pagesKomatsu PC200LC-6Collin Corp100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
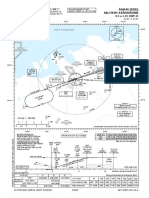
- I/G/O I/G/O A/M/I: Instrument Approach Chart - IcaoDocument1 pageI/G/O I/G/O A/M/I: Instrument Approach Chart - IcaoMIkołaj MorzePas encore d'évaluation
- Table 1. Data Set and CalculationDocument5 pagesTable 1. Data Set and CalculationliliPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- S02 Rob Grant Telephone Identifier - BPO 200 Type TelephonesDocument4 pagesS02 Rob Grant Telephone Identifier - BPO 200 Type TelephonesragscribblerPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Reinforced Concrete Design BS 8110Document15 pagesReinforced Concrete Design BS 8110Kutty Mansoor75% (4)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- UNIT - 1 (Data Structure Using C/C++) .: Definition of AlgorithmDocument2 pagesUNIT - 1 (Data Structure Using C/C++) .: Definition of AlgorithmArjun BhargavaPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Wind Load Calculation As Per ASCE 7 10Document8 pagesWind Load Calculation As Per ASCE 7 10ani145yadav100% (1)
- Falcon DEMCO Fire Alarm Bell (Weatherproof Type)Document1 pageFalcon DEMCO Fire Alarm Bell (Weatherproof Type)LaMinn PaingPas encore d'évaluation
- SET-1: Answer To The Interview QuestionsDocument9 pagesSET-1: Answer To The Interview QuestionsÆshok IncreĐible KingPas encore d'évaluation
- Ohm's Law and Kirchhoff's LawsDocument22 pagesOhm's Law and Kirchhoff's LawsTiarra MojelPas encore d'évaluation
- RHS Columnuns Embedded in RC ResearchDocument29 pagesRHS Columnuns Embedded in RC ResearchErnie Ernie100% (1)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Item 103 Structure ExcavationDocument3 pagesItem 103 Structure ExcavationGerry Velicaria100% (1)
- Makalah Program PDFDocument10 pagesMakalah Program PDFIvanFolkPas encore d'évaluation
- LGP4247L-12LPB-3P Eay62608902 PLDF-L103B Psu SM PDFDocument74 pagesLGP4247L-12LPB-3P Eay62608902 PLDF-L103B Psu SM PDF00dark100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Ericsson Essentials Health & Safety Plan Sample: Good For Smaller Projects and Bid QualificationsDocument18 pagesEricsson Essentials Health & Safety Plan Sample: Good For Smaller Projects and Bid QualificationsmohammedelrabeiPas encore d'évaluation
- Nutanix TN 2072 ESXi AHV Migration Version 2.2Document23 pagesNutanix TN 2072 ESXi AHV Migration Version 2.2Alejandro DariczPas encore d'évaluation
- Pmled 6 5K 10a 66Document6 pagesPmled 6 5K 10a 66Eduardo SalgadoPas encore d'évaluation
- Maps and Damos ID For EDC16 VAG ECUDocument7 pagesMaps and Damos ID For EDC16 VAG ECUGuler RahimPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Toyota 80 SeriesDocument5 pagesToyota 80 Seriesaagi_dPas encore d'évaluation
- GPU Programming in MATLABDocument6 pagesGPU Programming in MATLABkhaardPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)