Vous aimerez peut-être aussi
- Controlador Pid para Control de NivelDocument7 pagesControlador Pid para Control de NivelFreddy Enrique AguilarPas encore d'évaluation
- 12 Controladores Logicos FESTO - Puesta A Punto - Comunicación PLCDocument14 pages12 Controladores Logicos FESTO - Puesta A Punto - Comunicación PLCcarlos.otiniano9811Pas encore d'évaluation
- Que Es La Instrumentacion VirtualDocument17 pagesQue Es La Instrumentacion VirtualH-c UlisesPas encore d'évaluation
- Mantenimiento preventivo y correctivo: tipos y objetivosDocument9 pagesMantenimiento preventivo y correctivo: tipos y objetivosBuffon RoyalPas encore d'évaluation
- Unidad V Examen Ingeniería de Control Clásico U V ADocument2 pagesUnidad V Examen Ingeniería de Control Clásico U V AManuel NuñezPas encore d'évaluation
- Maquinado-procesos-corteDocument91 pagesMaquinado-procesos-corteJesus Manuel Vazquez NicolasPas encore d'évaluation
- Cuestionario sobre maquinas CNC: ventajas, precisión y códigosDocument2 pagesCuestionario sobre maquinas CNC: ventajas, precisión y códigosCracatoasPas encore d'évaluation
- Reporte de CodigoDocument13 pagesReporte de CodigoDavid Alc CPas encore d'évaluation
- Control PID de motores DCDocument6 pagesControl PID de motores DCNiko Garcia MeythalerPas encore d'évaluation
- Cinematic A Direct A RobotDocument72 pagesCinematic A Direct A RobotHans VilchezPas encore d'évaluation
- Tecnología de Mecanizado Moderna (Láser, Fresadora CNC)Document11 pagesTecnología de Mecanizado Moderna (Láser, Fresadora CNC)fabiancvargasPas encore d'évaluation
- Sistemas observables y matrices de observabilidadDocument2 pagesSistemas observables y matrices de observabilidadctagmPas encore d'évaluation
- Controladores Lógicos Programables (PLC)Document12 pagesControladores Lógicos Programables (PLC)Jose Antonio Gonzalez VelasquezPas encore d'évaluation
- Informe Final Practica 8Document11 pagesInforme Final Practica 8Alicia Arevalo0% (1)
- Simulacion de Corte de PiezasDocument29 pagesSimulacion de Corte de PiezasEufemioNoaChavezPas encore d'évaluation
- Sistemas Automatizados PresentacionDocument16 pagesSistemas Automatizados Presentaciongob.ibaguePas encore d'évaluation
- Torno CNC 100%Document28 pagesTorno CNC 100%Alexander GallardoPas encore d'évaluation
- Brochure LabviewDocument3 pagesBrochure LabviewWilder Ortiz VelasquezPas encore d'évaluation
- Fundamentos de PLCDocument3 pagesFundamentos de PLCJose Martin Serrano TorresPas encore d'évaluation
- Controladores Lógicos Programables Exp.Document22 pagesControladores Lógicos Programables Exp.Alfredo MendozaPas encore d'évaluation
- Introduccion A La Programacion CNC Modulo I PDFDocument19 pagesIntroduccion A La Programacion CNC Modulo I PDFJonathan ZáratePas encore d'évaluation
- Equipo 4 Sistemas de VisionDocument36 pagesEquipo 4 Sistemas de VisionJuanPas encore d'évaluation
- Procesos de Manufactura en Relacion Con Tolerancias Geometricas y DimensionalesDocument6 pagesProcesos de Manufactura en Relacion Con Tolerancias Geometricas y Dimensionalesrafaelito182100% (1)
- Sistemas Integrales de ManufacturaDocument16 pagesSistemas Integrales de ManufacturaEmanuel Alberto Rendon AvilaPas encore d'évaluation
- Herramientas de Mecanisado Torno Fresa, Cnc. Usos y AplicacionesDocument21 pagesHerramientas de Mecanisado Torno Fresa, Cnc. Usos y AplicacionesmorihnoPas encore d'évaluation
- SERVOMECANISMOSDocument19 pagesSERVOMECANISMOSLuis Antonio Salas AguilaPas encore d'évaluation
- Practica 3 Automatizados 2Document24 pagesPractica 3 Automatizados 2Juan ScratchPas encore d'évaluation
- Qué es un sistema GMAODocument21 pagesQué es un sistema GMAOCamilo MarcaPas encore d'évaluation
- Simbología de Los DiagramasDocument27 pagesSimbología de Los DiagramasAnne GarciaPas encore d'évaluation
- Indicadores de Calidad, Eficiencia y Desempeño ProductivoDocument1 pageIndicadores de Calidad, Eficiencia y Desempeño ProductivoGeorgina SRPas encore d'évaluation
- Diseño de Mecanismos de Levas y EngranesDocument18 pagesDiseño de Mecanismos de Levas y EngranesEpi Vargas AlcarazPas encore d'évaluation
- Los Siete Despilfarros de La ProduccionDocument29 pagesLos Siete Despilfarros de La ProduccionRobertoPinedaPas encore d'évaluation
- Elementos de Un Sistema Neumático y ElectroneumaticoDocument16 pagesElementos de Un Sistema Neumático y ElectroneumaticoBraulio SanchezPas encore d'évaluation
- FresadoDocument6 pagesFresadoTristán YulmenPas encore d'évaluation
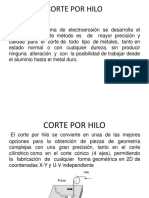
- Corte Por HiloDocument6 pagesCorte Por HiloMaferBeristainPas encore d'évaluation
- Diferencias Entre TPM y RCMDocument11 pagesDiferencias Entre TPM y RCMLUIS GERMAN GUARNIZO MEDINAPas encore d'évaluation
- Códigos de ProgramaciónDocument2 pagesCódigos de ProgramaciónPedro Alberto López CuencaPas encore d'évaluation
- Aplicaciones de Los RobotsDocument9 pagesAplicaciones de Los RobotsharoldPas encore d'évaluation
- Procesos de fabricación y manufactura: introducción generalDocument10 pagesProcesos de fabricación y manufactura: introducción generalGabrielPas encore d'évaluation
- Circuito NeumáticoDocument33 pagesCircuito Neumáticojulian trujilloPas encore d'évaluation
- Manual de Prácticas 2 Cero MaquinaDocument8 pagesManual de Prácticas 2 Cero MaquinaCarlos Alfredo Diaz HernandezPas encore d'évaluation
- Herramienta CONTROLADocument3 pagesHerramienta CONTROLAAlexis Rivera Medrano100% (1)
- Presentation 1Document27 pagesPresentation 1Luis ColmenarezPas encore d'évaluation
- Reporte Figuras WinunisoftDocument8 pagesReporte Figuras WinunisoftAdrianPas encore d'évaluation
- Historia CNCDocument15 pagesHistoria CNCRichard Moya100% (1)
- Capitulo 1 Instalacion de EasyMaintDocument18 pagesCapitulo 1 Instalacion de EasyMaintJose JaviPas encore d'évaluation
- Neumatica e HidraulicaDocument11 pagesNeumatica e HidraulicajhonPas encore d'évaluation
- Aplicación de La Matriz Jacobiana de Un Sistema de Control Borroso A La Obtención de Sus Estados de EquilibrioDocument11 pagesAplicación de La Matriz Jacobiana de Un Sistema de Control Borroso A La Obtención de Sus Estados de Equilibriovlady120489Pas encore d'évaluation
- Maquinas CNCDocument24 pagesMaquinas CNCBeaGomez2013Pas encore d'évaluation
- MPLAB Tutorial PIC16F84Document20 pagesMPLAB Tutorial PIC16F84Jose LuisPas encore d'évaluation
- Manufactura Avanzada PDFDocument8 pagesManufactura Avanzada PDFAarón Hernández SalinasPas encore d'évaluation
- Java Herencia PolimorfismoDocument88 pagesJava Herencia PolimorfismoElvis Jhon Chacha0% (1)
- Instituto Tecnológico de Apizaco: Arturo Castillo Baéz Ing. Mecatrónica Investigación CNC para Manufactura AvanzadaDocument7 pagesInstituto Tecnológico de Apizaco: Arturo Castillo Baéz Ing. Mecatrónica Investigación CNC para Manufactura AvanzadaArturo CastilloPas encore d'évaluation
- Sistema de Manufacturas ReconfigurablesDocument47 pagesSistema de Manufacturas Reconfigurablesandrew20_5Pas encore d'évaluation
- Automatización prensa troqueladoDocument115 pagesAutomatización prensa troqueladoAle KeyPas encore d'évaluation
- Evolucíon Procesos de ManufacturaDocument12 pagesEvolucíon Procesos de ManufacturaEdisson Arley Guzman Lopez50% (2)
- Proyecto Motor DCDocument5 pagesProyecto Motor DCMarlon BoknegraPas encore d'évaluation
- Modelo Matematico DiscretoDocument17 pagesModelo Matematico DiscretoRonyVargasPas encore d'évaluation
- Control 1Document9 pagesControl 1Danny Huaman OruePas encore d'évaluation
- Determinación parámetros motor DCDocument13 pagesDeterminación parámetros motor DCJose BarreraPas encore d'évaluation
- Cuestionario 1Document7 pagesCuestionario 1Abdias MoralesPas encore d'évaluation
- Abdias MS Cuestionario 1Document9 pagesAbdias MS Cuestionario 1Abdias MoralesPas encore d'évaluation
- Diseño y construcción de bobina de calentamiento por inducción para fundición de titanioDocument71 pagesDiseño y construcción de bobina de calentamiento por inducción para fundición de titanioRoberto CordovaPas encore d'évaluation
- Amorales p1v2Document6 pagesAmorales p1v2Abdias MoralesPas encore d'évaluation
- Reporte TermodinamicaDocument7 pagesReporte TermodinamicaAbdias MoralesPas encore d'évaluation
- Ensayo Ética y MoralDocument2 pagesEnsayo Ética y MoralAbdias MoralesPas encore d'évaluation
- Estudio Tecnico Foda Cruce Foda DemografiaDocument9 pagesEstudio Tecnico Foda Cruce Foda DemografiaAbdias MoralesPas encore d'évaluation
- Semejanzas Y Diferencias de La Ética Y Otras CienciasDocument1 pageSemejanzas Y Diferencias de La Ética Y Otras CienciasAbdias Morales75% (8)
- Reporte de Modelo de MotormatlabDocument8 pagesReporte de Modelo de MotormatlabAbdias MoralesPas encore d'évaluation
- PRACTICA 1 Tinaco y CisternaDocument2 pagesPRACTICA 1 Tinaco y CisternaAbdias MoralesPas encore d'évaluation
- Desarrolo InterpersonalDocument2 pagesDesarrolo InterpersonalAbdias MoralesPas encore d'évaluation
- Cinematica y Dinamica Nombre PDFDocument1 pageCinematica y Dinamica Nombre PDFAbdias MoralesPas encore d'évaluation
- Federico NischDocument6 pagesFederico NischAbdias MoralesPas encore d'évaluation
- 7 Pasos para Iniciar Tu NegocioDocument5 pages7 Pasos para Iniciar Tu NegocioAbdias MoralesPas encore d'évaluation
- Que Es El Temperamento 1212530453122725 8Document39 pagesQue Es El Temperamento 1212530453122725 8Abdias MoralesPas encore d'évaluation
- Ley de LenzDocument7 pagesLey de LenzLeonardo Polo GallegoPas encore d'évaluation
- Corriente ElectricaDocument26 pagesCorriente ElectricaMarlene Ramirez de CamargoPas encore d'évaluation
- Practica N°5 SimulacionDocument8 pagesPractica N°5 SimulacionMarco Antonio MendozaPas encore d'évaluation
- Control de PosiciónDocument17 pagesControl de PosiciónKevin MaldonadoPas encore d'évaluation
- Catálogo de Cables PIFUSADocument41 pagesCatálogo de Cables PIFUSAAlberyt099Pas encore d'évaluation
- Actividad 3Document1 pageActividad 3Yesica Katherine PENA PENAPas encore d'évaluation
- Manual de Tablero de SincronismoDocument5 pagesManual de Tablero de SincronismopedritograndePas encore d'évaluation
- 2 Instrumentación EléctricaDocument9 pages2 Instrumentación EléctricaDany EdmPas encore d'évaluation
- Conceptos Básicos Sobre Circuitos EléctricosDocument8 pagesConceptos Básicos Sobre Circuitos EléctricosJulianPatiñoPas encore d'évaluation
- Laboratorio 3 MaquinasDocument5 pagesLaboratorio 3 MaquinasJoan MartinezPas encore d'évaluation
- Informe de Laboratorio #1 Pruebas Efectuadas A Máquina de Corriente Directa Como Motor Y GeneradorDocument3 pagesInforme de Laboratorio #1 Pruebas Efectuadas A Máquina de Corriente Directa Como Motor Y GeneradoralejandroPas encore d'évaluation
- Reactivación banco pruebas motores C.V.G. CabelumDocument42 pagesReactivación banco pruebas motores C.V.G. CabelumEmersibel AlejandraPas encore d'évaluation
- Conceptos Básicos en La ElectrónicaDocument2 pagesConceptos Básicos en La Electrónica10S Sebastian MejiaPas encore d'évaluation
- Manual SG110CX Sungrow PDFDocument109 pagesManual SG110CX Sungrow PDFElvis RibeiroPas encore d'évaluation
- Investigación EléctricasDocument7 pagesInvestigación EléctricasLOAIZA JUAREZ AILEEN YANETH LICENCIATURA EN ARQUITECTURAPas encore d'évaluation
- Procedimientos de DiagnosticoDocument32 pagesProcedimientos de DiagnosticoArielPas encore d'évaluation
- Laboratorio 8 CEI CuadripolosDocument3 pagesLaboratorio 8 CEI CuadripolosJOSUEPas encore d'évaluation
- Control de Velocidad de Motor AsincronoDocument33 pagesControl de Velocidad de Motor Asincronoanim3n100% (1)
- Reparacion de Equipos de ComputoDocument94 pagesReparacion de Equipos de ComputoOsvel Pacheco CamachoPas encore d'évaluation
- Cargas de AlumbradoDocument1 pageCargas de AlumbradoblackvalaPas encore d'évaluation
- 01 Contactores Normalizados PDFDocument14 pages01 Contactores Normalizados PDFVictor Johannes Diaz TPas encore d'évaluation
- Condensadores Cooper 230-12S PDFDocument2 pagesCondensadores Cooper 230-12S PDFFreddy Enrique Luna MirabalPas encore d'évaluation
- Ti TVDocument80 pagesTi TVHernan Ahumada AhumadaPas encore d'évaluation
- Capítulo 2.2. Efecto Térmico de La ElectricidadDocument9 pagesCapítulo 2.2. Efecto Térmico de La ElectricidadJosé Mauricio Paco PérezPas encore d'évaluation
- Inversor 12v 600wDocument54 pagesInversor 12v 600wgeraldino2509208100% (2)
- Circuitos eléctricos 1: Práctica de carga y descarga de condensadoresDocument3 pagesCircuitos eléctricos 1: Práctica de carga y descarga de condensadoresJalil BarriosPas encore d'évaluation
- DescargadoresDocument13 pagesDescargadoresfederPas encore d'évaluation
- Baño Maria - WNB22 - MEMMERT - Manual de UsuarioDocument20 pagesBaño Maria - WNB22 - MEMMERT - Manual de UsuarioAlexander Guzmán HerreraPas encore d'évaluation
- 4 MotionDocument28 pages4 Motionclubtiguan100% (8)
- Cómo hacer que te pasen cosas buenas: Entiende tu cerebro, gestiona tus emociones, mejora tu vidaD'EverandCómo hacer que te pasen cosas buenas: Entiende tu cerebro, gestiona tus emociones, mejora tu vidaÉvaluation : 5 sur 5 étoiles5/5 (1866)
- El lenguaje del cuerpo: Una guía para conocer los sentimientos y las emociones de quienes nos rodeanD'EverandEl lenguaje del cuerpo: Una guía para conocer los sentimientos y las emociones de quienes nos rodeanÉvaluation : 4 sur 5 étoiles4/5 (49)
- No desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaD'EverandNo desperdicies tus emociones: Cómo lo que sientes te acerca a Dios y le da gloriaÉvaluation : 4.5 sur 5 étoiles4.5/5 (11)
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaD'EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaÉvaluation : 5 sur 5 étoiles5/5 (200)
- Resetea tu mente. Descubre de lo que eres capazD'EverandResetea tu mente. Descubre de lo que eres capazÉvaluation : 5 sur 5 étoiles5/5 (196)
- Tu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaD'EverandTu cerebro emocional: Saca partido de lo que sientes y transforma tu vidaÉvaluation : 5 sur 5 étoiles5/5 (2)
- Terapia cognitivo-conductual (TCC) y terapia dialéctico-conductual (TDC): Cómo la TCC, la TDC y la ACT pueden ayudarle a superar la ansiedad, la depresión, y los TOCSD'EverandTerapia cognitivo-conductual (TCC) y terapia dialéctico-conductual (TDC): Cómo la TCC, la TDC y la ACT pueden ayudarle a superar la ansiedad, la depresión, y los TOCSÉvaluation : 5 sur 5 étoiles5/5 (1)
- Disciplina con amor para adolescentes (Discipline With Love for Adolescents): Guía para llevarte bien con tu adolescente (A Guide for Getting Along Well With Your Adolescent)D'EverandDisciplina con amor para adolescentes (Discipline With Love for Adolescents): Guía para llevarte bien con tu adolescente (A Guide for Getting Along Well With Your Adolescent)Évaluation : 5 sur 5 étoiles5/5 (10)
- El poder del optimismo: Herramientas para vivir de forma más positivaD'EverandEl poder del optimismo: Herramientas para vivir de forma más positivaÉvaluation : 4.5 sur 5 étoiles4.5/5 (15)
- Psiconeuroinmunología para la práctica clínicaD'EverandPsiconeuroinmunología para la práctica clínicaÉvaluation : 5 sur 5 étoiles5/5 (4)
- Psicogenealogía: Sanar las heridas del alma y encontrarse a uno mismoD'EverandPsicogenealogía: Sanar las heridas del alma y encontrarse a uno mismoÉvaluation : 5 sur 5 étoiles5/5 (5)
- Influencia. La psicología de la persuasiónD'EverandInfluencia. La psicología de la persuasiónÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Pensamiento Crítico: Utiliza modelos mentales para desarrollar tomas de decisiones efectivas y habilidades de resolución de problemas. Supera los obstáculos cognitivos y las falacias en los sistemas para pensar con claridad en tu vida cotidiana.D'EverandPensamiento Crítico: Utiliza modelos mentales para desarrollar tomas de decisiones efectivas y habilidades de resolución de problemas. Supera los obstáculos cognitivos y las falacias en los sistemas para pensar con claridad en tu vida cotidiana.Évaluation : 4.5 sur 5 étoiles4.5/5 (33)
- ¿Por qué mis padres no me aman?: Empezando a sanarD'Everand¿Por qué mis padres no me aman?: Empezando a sanarÉvaluation : 4.5 sur 5 étoiles4.5/5 (33)
- Maneja tus emociones: Curso intensivo de mindfulness y regulación emocionalD'EverandManeja tus emociones: Curso intensivo de mindfulness y regulación emocionalÉvaluation : 4.5 sur 5 étoiles4.5/5 (140)
- Después de la infidelidad: Sanando el dolor y restableciendo la conD'EverandDespués de la infidelidad: Sanando el dolor y restableciendo la conÉvaluation : 4 sur 5 étoiles4/5 (15)
- Cómo Conversar Con Cualquier Persona: Mejora tus habilidades sociales, desarrolla tu carisma, domina las conversaciones triviales y conviértete en una persona sociable para hacer verdaderos amigos y construir relaciones significativas.D'EverandCómo Conversar Con Cualquier Persona: Mejora tus habilidades sociales, desarrolla tu carisma, domina las conversaciones triviales y conviértete en una persona sociable para hacer verdaderos amigos y construir relaciones significativas.Évaluation : 5 sur 5 étoiles5/5 (54)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceD'EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceÉvaluation : 5 sur 5 étoiles5/5 (8)
- Ansiedad infantil. Los trastornos explicados a los padresD'EverandAnsiedad infantil. Los trastornos explicados a los padresÉvaluation : 4.5 sur 5 étoiles4.5/5 (25)
- Contra la ansiedad: Una guía completa para manejar emociones difícilesD'EverandContra la ansiedad: Una guía completa para manejar emociones difícilesÉvaluation : 5 sur 5 étoiles5/5 (58)
- Resumen de El Sutil Arte de que te Importe un Carajo, de Mark MansonD'EverandResumen de El Sutil Arte de que te Importe un Carajo, de Mark MansonÉvaluation : 4.5 sur 5 étoiles4.5/5 (15)
- Te odio - no me abandones: Comprender el trastorno límite de personalidadD'EverandTe odio - no me abandones: Comprender el trastorno límite de personalidadÉvaluation : 5 sur 5 étoiles5/5 (3)
- Libro de Trabajo DE LA TERAPIA DE ACEPTACIÓN Y COMPROMISO (ACT). UNA GUÍA COMPLETA PARA CAMBIAR EL MINDFULNESS Y RECUPERARSE DE LA ANSIEDAD, LA DEPRESIÓN, LOS ATAQUES DE PÁNICO Y LA IRAD'EverandLibro de Trabajo DE LA TERAPIA DE ACEPTACIÓN Y COMPROMISO (ACT). UNA GUÍA COMPLETA PARA CAMBIAR EL MINDFULNESS Y RECUPERARSE DE LA ANSIEDAD, LA DEPRESIÓN, LOS ATAQUES DE PÁNICO Y LA IRAÉvaluation : 4 sur 5 étoiles4/5 (26)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoD'EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoÉvaluation : 5 sur 5 étoiles5/5 (2)