Vous aimerez peut-être aussi
- Dzcheng Pseudo Hamiltonian PDFDocument30 pagesDzcheng Pseudo Hamiltonian PDFIgnacio Villalobos AguileraPas encore d'évaluation
- Contact Systems Eberard, Mashke, Shaft 2005 PDFDocument5 pagesContact Systems Eberard, Mashke, Shaft 2005 PDFIgnacio Villalobos AguileraPas encore d'évaluation
- Control by Interconnection and Standard PBC Control of PHS Ortega 2008 PDFDocument16 pagesControl by Interconnection and Standard PBC Control of PHS Ortega 2008 PDFIgnacio Villalobos AguileraPas encore d'évaluation
- This Work Was Partially Supported by HYCONDocument8 pagesThis Work Was Partially Supported by HYCONIgnacio Villalobos AguileraPas encore d'évaluation
- Stabilization of port–controlled Hamiltonian systems via energy balancingDocument22 pagesStabilization of port–controlled Hamiltonian systems via energy balancingIgnacio Villalobos AguileraPas encore d'évaluation
- Port-Hamiltonian Modeling For Control: Annual Review of Control, Robotics, and Autonomous SystemsDocument24 pagesPort-Hamiltonian Modeling For Control: Annual Review of Control, Robotics, and Autonomous SystemsIgnacio Villalobos AguileraPas encore d'évaluation
- Automatica 02Document12 pagesAutomatica 02zorazoyacarlaPas encore d'évaluation
- Control of IphdDocument7 pagesControl of IphdIgnacio Villalobos AguileraPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- B.E. Civil Engineering Project ProposalDocument10 pagesB.E. Civil Engineering Project Proposalmahipal287Pas encore d'évaluation
- Overcurrent Protection and Voltage Sag Coordination in Systems With Distributed GenerationDocument12 pagesOvercurrent Protection and Voltage Sag Coordination in Systems With Distributed GenerationAli AhmadPas encore d'évaluation
- Engineering Technical Report of The v12 Engine and Related Assignments at Tipco IncDocument36 pagesEngineering Technical Report of The v12 Engine and Related Assignments at Tipco Incapi-244817040Pas encore d'évaluation
- Abb CatDocument9 pagesAbb CatMukesh Kumar MeenaPas encore d'évaluation
- HazMat DOTDocument48 pagesHazMat DOTRenalyn TorioPas encore d'évaluation
- Generador de Vapor Cu360Document36 pagesGenerador de Vapor Cu360Jonatan medran ochoaPas encore d'évaluation
- Design of Coin Sorter Counter Based On MCU: Articles You May Be Interested inDocument5 pagesDesign of Coin Sorter Counter Based On MCU: Articles You May Be Interested inArchana BenkarPas encore d'évaluation
- Indicator Valve Maintenance GuideDocument15 pagesIndicator Valve Maintenance GuideJonoAlexisDang-awanQuiban100% (1)
- Bennic (Bi-Polar Radial) PB-PX SeriesDocument3 pagesBennic (Bi-Polar Radial) PB-PX Seriesester853Pas encore d'évaluation
- The Comeback of Caterpillar (CAT), 1985-2001Document12 pagesThe Comeback of Caterpillar (CAT), 1985-2001Anosh IlyasPas encore d'évaluation
- cs2071 New Notes 1Document34 pagescs2071 New Notes 1intelinsideocPas encore d'évaluation
- ZZZXDocument14 pagesZZZXJay R DenostaPas encore d'évaluation
- Approved List of Manufacturers: Line Pipes (Carbon/Alloy Steel)Document4 pagesApproved List of Manufacturers: Line Pipes (Carbon/Alloy Steel)Sourav Kumar GuptaPas encore d'évaluation
- Konica 7020 Error Codes: Code DescriptionDocument3 pagesKonica 7020 Error Codes: Code Descriptionsaito36Pas encore d'évaluation
- Effect of CSR on Corporate Reputation and PerformanceDocument13 pagesEffect of CSR on Corporate Reputation and PerformanceAnthon AqPas encore d'évaluation
- AT-8600 Series Switch: Hardware ReferenceDocument30 pagesAT-8600 Series Switch: Hardware ReferenceSubbuPas encore d'évaluation
- Monitoring Critical Applications at SeaDocument3 pagesMonitoring Critical Applications at SeaMohamed AliPas encore d'évaluation
- Enprep - 110 EC Steel Cu BrassDocument3 pagesEnprep - 110 EC Steel Cu BrassLựuLiềuLìPas encore d'évaluation
- TSQL Coding Standards ChecklistDocument5 pagesTSQL Coding Standards ChecklistSaman AzeemPas encore d'évaluation
- ALFA 4000 - Peru 2 PDFDocument2 pagesALFA 4000 - Peru 2 PDFErick MaderoPas encore d'évaluation
- AllProducts catalogGREENHECKDocument52 pagesAllProducts catalogGREENHECKGenes Macalintal GalleneroPas encore d'évaluation
- EECS 373 Architecture, Assembly, and ABI LectureDocument29 pagesEECS 373 Architecture, Assembly, and ABI Lectureavinash_yuvarajPas encore d'évaluation
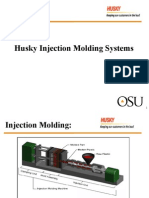
- HuskyDocument10 pagesHuskypreetimurali100% (1)
- Advanced Photoshop Magazine 121-2014 PDFDocument100 pagesAdvanced Photoshop Magazine 121-2014 PDFgusonePas encore d'évaluation
- Flow Chart Fixed Column BasesDocument4 pagesFlow Chart Fixed Column BasesstycnikPas encore d'évaluation
- MASTERSEAL 755 SPF v1 PDFDocument2 pagesMASTERSEAL 755 SPF v1 PDFJaga Nath100% (1)
- Barrera BANNER 2 PDFDocument10 pagesBarrera BANNER 2 PDFrollinga2013Pas encore d'évaluation
- Manual (4906-9127)Document6 pagesManual (4906-9127)LuisCabreraOroscoPas encore d'évaluation
- Keystone Owners Manual 2019 PDFDocument104 pagesKeystone Owners Manual 2019 PDFBrePas encore d'évaluation
- WebSphere Installation InstructionsDocument1 pageWebSphere Installation InstructionsjcalaqPas encore d'évaluation