IMPACT: International Journal of Research in
Engineering & Technology
ISSN (P): 2347-4599; ISSN (E): 2321-8843
Vol. 5, Issue11, Nov 2017, 35-40
Impact Journals
AN ADVANCED MODEL, FOR THE MONITORING ROBOT
INTRANSFORMER STATION
NGUYEN HUU HIEU & TRAN ANH TUAN
Research Scholar, Department of Electrical Engineering, Da Nang University of Science and Technology, Vietnam
ABSTRACT
Nowadays, the automatic is intensively applied in power system, such as electronic meter, information systems.
This has improved the transparency and accuracy in the electricity market. Therefore, the automatic in power system is
encouraged to upgrade the next level, in which the automation in the trans- former station is put the high attention.
Therefore, this paper presents an advanced model of a robot to monitor an automatic transformer station where there are no
people in. Moreover, this model is used to build a real robot and confirm its robustness in the real transformer station in
Hoi an, Danang city, Vietnam.
KEYWORDS: Image Recognition, Automatic Robot, Lab View, Transformer Station, Vietnam
INTRODUCTION
Currently, the Automatic Transformer Station (ATS) is the right solution for the power system because it is
managed automatically. In the future, a series of automatic and remote control transformer stations will be put into
operation. This is also an indispensable direction, towards the implementation of smart grid route.
In fact, the ATS is the optimal solution for the power system because it is managed and operated automatically.
Besides, it is improving working productivity, minimizing employees, minimize cable investment, intermediate equipment,
improve the reliability of the device's working precision, ensure continuous power supply, solve the problem of overload;
minimizing operator malfunction, improving operator safety and meeting the requirements of the power market. Although
the research to apply for quite a long time, the deployment of untranslatable ATS still many challenges.
Particularly, Vietnamese power system has intensively used the automatic in operation the system such as
electronic bill, electricity bill payment via bank. It has reduced the cost of issuing traditional paper invoices, and has
simplified the staff collect money. The technology has been applied, has brought many practical benefits, help the power
companies to use human resources in a reasonable way. Electronic meters also contribute to the management of accurate
metering and automation data, modernization of information systems serving customers, contributing to transparency in the
business of electricity. Moreover, Vietnamese Power Company is investing, building many ATSs. By the end of 2014, the
Tan Son Nhat 110 kV substation (directly under the Ho Chi Minh City High Voltage Grid Company, Ho Chi Minh City
Electricity Corporation), will be officially put into operation, after the pilot period. After, successfully piloting Tan Son
Nhat station, in 2015, there were five additional stations: Tang Nhon Phu Station, Saigon South 1, Phu My Hung A, Tan
Quy (Cu Chi District) and Da Kao (District 1).
Impact Factor(JCC): 3.8965- This article can be downloaded from www.impactjournals.us
36 Nguyen Huu Hieu & Tran Anh Tuan
With the aim of reducing the number of passengers, improving operational efficiency in the 500kV, 220kV and
110kV Transmission Station, the Electricity of Vietnam has issued the document No. 4725 / EVN-KTSX (Nguyen Thai
Hung 2016) dated November 11, 2015, for internal deployment. To organize the Remote Control Center (RCC) and the
ATS without people directly with the orientation as follows:
Apply automation solutions to reduce the number of operators at power plants and ATSs, improve working
productivity and increase the reliability of power supply while ensuring safe grid operation;
The target to reduce the number of people at 500kV, 220kV conventional transformer station by 2020, 110kV
conventional transformer station is station without human operator.
Research and application of improved solutions for 110kV ATSs have been studied by some authors. However,
the implementation has only been made for some 110kV ATSs that have computerized control systems and are
independent of each province and have not been implemented, for all 110kV ATSs until 2020, in Vietnam.
Related Works
The robot carries infrared cameras, to monitor temperature at the "hot spots" in the station. A robot model with an
infrared camera for temperature monitoring has been developed at the University of Sao Paulo, Brazil (J. K. C. Pinto et al.,
2008). This is a robotic robot system, moving the robot in the air according to the orientation cable system. Robots and
infrared cameras are remotely controlled via 2.45GHz wifi waves from the central control computer placed in the control
room of the station. Thermal imaging images obtained from infrared cameras are transmitted wireless to the central
computer for processing and it allows automatic detection of over temperature points in the station. Flying robots (C. Deng
et al., 2008) are commonly used to monitor power transmission lines because of its wide operating range and flexibility.
Robot flying camera can also collect images and send to the center. The self-propelled robot moves on the ground most
suitable for automated research in substations because of its flexible operation. Robots are used to monitor equipment
status in the station, device status and also used to monitor security. This robot model has been researched and developed
in universities in China (R. Guo et al., 2010;S. Luet al., 2017, B. Wanget al., 2012;S. Lu et al. 2008). The robot carries a
camera on the ground, automatically controlling it to various positions for image recognition and transfer to the central
control computer. Self-powered robots are also studied in this project to increase the automation level of the robot.
Challenges and Contributions
From the discussions above, the main aim of this paper is to build a monitoring robot which can automatically
operate in an ATS with some characteristics as follow:
It is able to move wherever in the transmission station, thus reducing the number of required camera;
The camera of the robot can turn to a large degree and the lend has a deep focus. It thus can see overall the
transmission station;
Using wireless technology to transfer data, thus it can move in any environment and avoid the disadvantage
of the length of connection wire; Algorithm of recognizing image is developed in the Labview software.
However, to derive a complete robot which can automatically operate in an ATS, some challenges are detected
and solved. This can be seen as the contributions of this paper as follow:
NAAS Rating: 2.73- Articles can be sent to editor@impactjournals.us
An Advanced Model for the Monitoring Robot in transformer Station 37
Lack of the historical data which can be used to recognize the condition of the switch (open and close);
The quality of image due to the reaction of brightness;
The darkness can significantly affect the reliability of operation of the robot.
METHODOLOGY
The Model of the Monitoring Robot
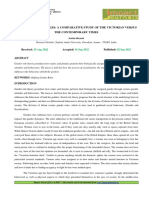
Figure 1: The Example of Three Points Method
The operation of the motoring robot is presented in Figure. 1 and the robot operates as follow
The data and location of objects such as circuit breakers, switches and meters;
The robot has two options: (i) automatic, and (ii) manual. In which, the manual option can select the objects
to check, while the automatic option is not; The robot will collect the images and signal, then send them to
the Personal Computer for the further investigations;
The recognizing image process is made in the Labview software (Labview 2017);
The final process is to compare the result with the orders made by the Control Center, to detect the fault.
Image Recognition
One of the most difficult works of this paper is the recognition of image in order to check the status of objects
such as the meters to check the temperature of either high and low voltage core or oil of the transformer. Besides, the status
of the switch is also a challenge since there is lack of the historical data. Thus, this paragraph explains the methodology to
solve these issues.
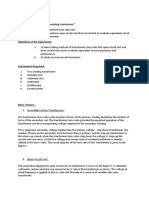
These issues can be solved by some available functions in Labview (Labview 2017). About the meters in Fig. 2,
three points method is applied, in which this function will recognize three points: pointstart, pointend, and pointmid. From
these three points, the function will compute the total degree Degtot of the range measurement and the degree of hour hand
Deghh. Then, from the pointmid, the function will show, exactly the value of temperature.
Impact Factor(JCC): 3.8965- This article can be downloaded from www.impactjournals.us
38 Nguyen Huu Hieu & Tran Anh Tuan
Figure 2:
2 The Example of Three Points Method
The formula to compute the actual value of the example in Fig. 2:
Deg
Result point point 1
Deg
Where Result is the actual value
Moreover, one of the most difficult issues is the status of the switch since the historical data is missing. In order to
overcome this issue, the match pattern is used. Here, the minimum score presents the threshold; it means that if the
percentage of duplication is below the threshold, the status of the switch is open
o and vice-versa.
versa.
TEST AND RESULT
Figure 3: The Monitoring Robot
The robustness and reliability of the robot in Fig. 3, it is tested in a real substation (110 kV Hoi An) in Fig 4. In
this station, there are six points which need to measure and check as
a follow:
The meter of transformer;
The switches of phase A;
The switches of phase C;
The meter to measure the temperature of the high and low voltage;
The meter of the status of the circuit breaker;
The meter of pressure of oil in the transformer.
NAAS Rating: 2.73-
2.73 Articles can be sent to editor@impactjournals.us
An Advanced Model for the Monitoring Robot in transformer Station 39
Figure 4: The Hoi an Transformer Substation
The robot is tested in two cases: (i) automatic, and (ii) manual setting. The result shows that the robot worked
exactly in all cases such as the measure of temperature and status of switches. In the automatic mode, the robot goes from
this point to anotherr point as in Fig 5. It should be noted that these points are set as the default, in which R1, R2, R3, R4,
R5, and R6 have represented the locations of objects in Fig. 4, respectively. One example is shown in Fig. 6.a
6 for the meter
of the transformer. Here,, the robot detects exactly the actual temperature of objects such as the core of high and low
voltage, and the oil of the transformer. Moreover, the status of the switch is also detected exactly with the threshold is 60
% as in Fig. 6.b Eventually, to overcome
rcome the darkness during the night, the led lights are installed on each subject to
increase the brightness and saving energy.
Figure 5: The Moving Direction of the Robot in the Substation in Hoi An
a) (b)
Figure 6: The Objects (a) The Meters of Transformer and (b) The Switch
Impact Factor(JCC): 3.8965-
3.8965 This article can be downloaded from www.impactjournals.us
40 Nguyen Huu Hieu & Tran Anh Tuan
In both cases, the robot works efficiently and correctly for both day and night, and in any case of weather in
Vietnam.
CONCLUSIONS
This paper completely presents the model of a monitoring robot which can automatically operate in a transformer
station. The challenges and solutions are also detected and presented in this paper. Finally, the monitoring robot is tested in
a real transformers station; the result confirmed the robustness and reliability of the robot. Therefore, the application of this
robot is promising in the real application.
REFERENCES
1. C. Deng, S. Wang, Z. Huang, Z. Tan, J. Liu (2014), Unmanned aerial vehicles for power line inspection: A
cooperative way in platforms and communications, J. Commun 9 (2014), pp. 687-692.
2. R. Guo, L. Han, Y. Sun, M. Wang (2010), A mobile robot for inspection of substation equipment, 2010 1st
International Conference on Applied Robotics for the Power Industry, pp. 1-5.
3. Labview (2017), National Instrument, http://www.ni.com/en-vn/shop/labview.html.
4. S. Lu, Y. Zhang, J. Su (2017), Mobile robot for power substation inspection: a survey, IEEE/CAA Journal of
AutomaticaSinica PP (99) (2017), pp. 1-18.
5. S. Lu, L. Feng, J. Dong (2008), Design of control system for substation equipment inspection robot based on
embedded linux, 2008 Chinese Control and Decision Conference, pp. 1709-1712..
6. Supriya Sahu et al., Cycle Time Optimized Path Planning for Industrial Robot using Robomaster, International
Journal of Mechanical and Production Engineering Research and Development (IJMPERD), Volume 7, Issue 5,
September-October 2017, pp. 95-102
7. Nguyen Thai Hung (2016), Building a remote control center and a modern transformer station: Stepping of a
smart grid strategy, num 184 (6/2016), Journal of Automation Today.
8. J. K. C. Pinto, M. Masuda, L. C. Magrini, J. A. Jardini, M. V. Garbelloti (2008), Mobile robot for hot spot
monitoring in electric power substation, 2008 IEEE/PES Transmission and Distribution Conference and
Exposition,pp. 1-5.
9. B. Wang, R. Guo, B. Li, L. Han, Y. Sun, M. Wang (2012), Smartguard: An autonomous robotic system for
inspecting substation equipment, Journal of Field Robotics 29 (1) (2012), pp. 123-137.
NAAS Rating: 2.73- Articles can be sent to editor@impactjournals.us
Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Continuity & Insulation Resistance Test - CablesDocument8 pagesContinuity & Insulation Resistance Test - Cablesamer_arauf85% (20)
- Codigos Falla Transmision Freighlitner PDFDocument3 pagesCodigos Falla Transmision Freighlitner PDFJoaquin mejiaPas encore d'évaluation
- Ex01 PDFDocument2 pagesEx01 PDFGavie MarquosPas encore d'évaluation
- 1E-Motors Inspection ChecklistDocument1 page1E-Motors Inspection ChecklistAnonymous iiUUgwPas encore d'évaluation
- 09-12-2022-1670567289-6-Impact - Ijrhal-06Document17 pages09-12-2022-1670567289-6-Impact - Ijrhal-06Impact JournalsPas encore d'évaluation
- 12-11-2022-1668238142-6-Impact - Ijrbm-01.Ijrbm Smartphone Features That Affect Buying Preferences of StudentsDocument7 pages12-11-2022-1668238142-6-Impact - Ijrbm-01.Ijrbm Smartphone Features That Affect Buying Preferences of StudentsImpact JournalsPas encore d'évaluation
- 14-11-2022-1668421406-6-Impact - Ijrhal-01. Ijrhal. A Study On Socio-Economic Status of Paliyar Tribes of Valagiri Village AtkodaikanalDocument13 pages14-11-2022-1668421406-6-Impact - Ijrhal-01. Ijrhal. A Study On Socio-Economic Status of Paliyar Tribes of Valagiri Village AtkodaikanalImpact JournalsPas encore d'évaluation
- 19-11-2022-1668837986-6-Impact - Ijrhal-2. Ijrhal-Topic Vocational Interests of Secondary School StudentsDocument4 pages19-11-2022-1668837986-6-Impact - Ijrhal-2. Ijrhal-Topic Vocational Interests of Secondary School StudentsImpact JournalsPas encore d'évaluation
- 09-12-2022-1670567569-6-Impact - Ijrhal-05Document16 pages09-12-2022-1670567569-6-Impact - Ijrhal-05Impact JournalsPas encore d'évaluation
- 19-11-2022-1668838190-6-Impact - Ijrhal-3. Ijrhal-A Study of Emotional Maturity of Primary School StudentsDocument6 pages19-11-2022-1668838190-6-Impact - Ijrhal-3. Ijrhal-A Study of Emotional Maturity of Primary School StudentsImpact JournalsPas encore d'évaluation
- Influence of Erotic Nollywood Films Among Undergraduates of Lead City University, Ibadan, NigeriaDocument12 pagesInfluence of Erotic Nollywood Films Among Undergraduates of Lead City University, Ibadan, NigeriaImpact JournalsPas encore d'évaluation
- 12-10-2022-1665566934-6-IMPACT - IJRHAL-2. Ideal Building Design y Creating Micro ClimateDocument10 pages12-10-2022-1665566934-6-IMPACT - IJRHAL-2. Ideal Building Design y Creating Micro ClimateImpact JournalsPas encore d'évaluation
- 28-10-2022-1666956219-6-Impact - Ijrbm-3. Ijrbm - Examining Attitude ...... - 1Document10 pages28-10-2022-1666956219-6-Impact - Ijrbm-3. Ijrbm - Examining Attitude ...... - 1Impact JournalsPas encore d'évaluation
- 25-10-2022-1666681548-6-IMPACT - IJRHAL-4. IJRHAL-Challenges of Teaching Moral and Ethical Values in An Age of Instant GratificationDocument4 pages25-10-2022-1666681548-6-IMPACT - IJRHAL-4. IJRHAL-Challenges of Teaching Moral and Ethical Values in An Age of Instant GratificationImpact JournalsPas encore d'évaluation
- Effect of Sahaja Yoga Meditation in Reducing Anxiety Level of Class Vi Students Towards English As A Second LanguageDocument8 pagesEffect of Sahaja Yoga Meditation in Reducing Anxiety Level of Class Vi Students Towards English As A Second LanguageImpact JournalsPas encore d'évaluation
- Effect of Organizational Commitment On Research and Development Performance of Academics: An Empirical Analysis in Higher Educational InstitutionsDocument12 pagesEffect of Organizational Commitment On Research and Development Performance of Academics: An Empirical Analysis in Higher Educational InstitutionsImpact JournalsPas encore d'évaluation
- 15-10-2022-1665806338-6-IMPACT - IJRBM-1. IJRBM Theoretical and Methodological Problems of Extra-Budgetary Accounting in Educational InstitutionsDocument10 pages15-10-2022-1665806338-6-IMPACT - IJRBM-1. IJRBM Theoretical and Methodological Problems of Extra-Budgetary Accounting in Educational InstitutionsImpact JournalsPas encore d'évaluation
- 11-10-2022-1665489521-6-IMPACT - IJRHAL-Analysing The Matrix in Social Fiction and Its Relevance in Literature.Document6 pages11-10-2022-1665489521-6-IMPACT - IJRHAL-Analysing The Matrix in Social Fiction and Its Relevance in Literature.Impact JournalsPas encore d'évaluation
- 02-09-2022-1662112193-6-Impact - Ijrhal-1. Ijrhal - Shifting Gender Roles A Comparative Study of The Victorian Versus The Contemporary TimesDocument12 pages02-09-2022-1662112193-6-Impact - Ijrhal-1. Ijrhal - Shifting Gender Roles A Comparative Study of The Victorian Versus The Contemporary TimesImpact JournalsPas encore d'évaluation
- 21-09-2022-1663757720-6-Impact - Ijranss-3. Ijranss - The Role and Objectives of Criminal LawDocument8 pages21-09-2022-1663757720-6-Impact - Ijranss-3. Ijranss - The Role and Objectives of Criminal LawImpact JournalsPas encore d'évaluation
- 27-10-2022-1666851544-6-IMPACT - IJRANSS-2. IJRANSS - A Review On Role of Ethics in Modern-Day Research Assignment - 1Document6 pages27-10-2022-1666851544-6-IMPACT - IJRANSS-2. IJRANSS - A Review On Role of Ethics in Modern-Day Research Assignment - 1Impact JournalsPas encore d'évaluation
- 05-09-2022-1662375638-6-Impact - Ijranss-1. Ijranss - Analysis of Impact of Covid-19 On Religious Tourism Destinations of Odisha, IndiaDocument12 pages05-09-2022-1662375638-6-Impact - Ijranss-1. Ijranss - Analysis of Impact of Covid-19 On Religious Tourism Destinations of Odisha, IndiaImpact JournalsPas encore d'évaluation
- 07-09-2022-1662545503-6-Impact - Ijranss-2. Ijranss - Role of Bio-Fertilizers in Vegetable Crop Production A ReviewDocument6 pages07-09-2022-1662545503-6-Impact - Ijranss-2. Ijranss - Role of Bio-Fertilizers in Vegetable Crop Production A ReviewImpact JournalsPas encore d'évaluation
- 22-09-2022-1663824012-6-Impact - Ijranss-5. Ijranss - Periodontics Diseases Types, Symptoms, and Its CausesDocument10 pages22-09-2022-1663824012-6-Impact - Ijranss-5. Ijranss - Periodontics Diseases Types, Symptoms, and Its CausesImpact JournalsPas encore d'évaluation
- 19-09-2022-1663587287-6-Impact - Ijrhal-3. Ijrhal - Instability of Mother-Son Relationship in Charles Dickens' Novel David CopperfieldDocument12 pages19-09-2022-1663587287-6-Impact - Ijrhal-3. Ijrhal - Instability of Mother-Son Relationship in Charles Dickens' Novel David CopperfieldImpact JournalsPas encore d'évaluation
- 20-09-2022-1663649149-6-Impact - Ijrhal-2. Ijrhal - A Review of Storytelling's Role and Effect On Language Acquisition in English Language ClassroomsDocument10 pages20-09-2022-1663649149-6-Impact - Ijrhal-2. Ijrhal - A Review of Storytelling's Role and Effect On Language Acquisition in English Language ClassroomsImpact JournalsPas encore d'évaluation
- 28-09-2022-1664362344-6-Impact - Ijrhal-4. Ijrhal - Understanding The Concept of Smart City and Its Socio-Economic BarriersDocument8 pages28-09-2022-1664362344-6-Impact - Ijrhal-4. Ijrhal - Understanding The Concept of Smart City and Its Socio-Economic BarriersImpact JournalsPas encore d'évaluation
- 21-09-2022-1663757902-6-Impact - Ijranss-4. Ijranss - Surgery, Its Definition and TypesDocument10 pages21-09-2022-1663757902-6-Impact - Ijranss-4. Ijranss - Surgery, Its Definition and TypesImpact JournalsPas encore d'évaluation
- 24-09-2022-1664015374-6-Impact - Ijranss-6. Ijranss - Patterns of Change Among The Jatsas Gleaned From Arabic and Persian SourcesDocument6 pages24-09-2022-1664015374-6-Impact - Ijranss-6. Ijranss - Patterns of Change Among The Jatsas Gleaned From Arabic and Persian SourcesImpact JournalsPas encore d'évaluation
- Comparison of Soil Properties Collected From Nalgonda, Ranga Reddy, Hyderabad and Checking Its Suitability For ConstructionDocument8 pagesComparison of Soil Properties Collected From Nalgonda, Ranga Reddy, Hyderabad and Checking Its Suitability For ConstructionImpact JournalsPas encore d'évaluation
- 01-10-2022-1664607817-6-Impact - Ijrbm-2. Ijrbm - Innovative Technology in Indian Banking Sector-A Prospective AnalysisDocument4 pages01-10-2022-1664607817-6-Impact - Ijrbm-2. Ijrbm - Innovative Technology in Indian Banking Sector-A Prospective AnalysisImpact JournalsPas encore d'évaluation
- Study and Investigation On The Red and Intangible Cultural Sites in Guangdong - Chasing The Red Mark and Looking For The Intangible Cultural HeritageDocument14 pagesStudy and Investigation On The Red and Intangible Cultural Sites in Guangdong - Chasing The Red Mark and Looking For The Intangible Cultural HeritageImpact JournalsPas encore d'évaluation
- 29-08-2022-1661768824-6-Impact - Ijrhal-9. Ijrhal - Here The Sky Is Blue Echoes of European Art Movements in Vernacular Poet Jibanananda DasDocument8 pages29-08-2022-1661768824-6-Impact - Ijrhal-9. Ijrhal - Here The Sky Is Blue Echoes of European Art Movements in Vernacular Poet Jibanananda DasImpact JournalsPas encore d'évaluation
- 25-08-2022-1661426015-6-Impact - Ijrhal-8. Ijrhal - Study of Physico-Chemical Properties of Terna Dam Water Reservoir Dist. Osmanabad M.S. - IndiaDocument6 pages25-08-2022-1661426015-6-Impact - Ijrhal-8. Ijrhal - Study of Physico-Chemical Properties of Terna Dam Water Reservoir Dist. Osmanabad M.S. - IndiaImpact JournalsPas encore d'évaluation
- CA110396en 03Document78 pagesCA110396en 03nmnicolauPas encore d'évaluation
- 64 Kbit (8 K X 8) Autostore Nvsram: Features Functional DescriptionDocument23 pages64 Kbit (8 K X 8) Autostore Nvsram: Features Functional DescriptionAmine EminePas encore d'évaluation
- PVTRIN Training Course: Troubleshooting GuideDocument20 pagesPVTRIN Training Course: Troubleshooting GuideBeni Saputra100% (1)
- Electrical Load EstimationDocument8 pagesElectrical Load EstimationWidhi ImranovichPas encore d'évaluation
- Electronic ControllersDocument9 pagesElectronic ControllersMourougapragash SubramanianPas encore d'évaluation
- Switch: Types of Switches According To Installation MountingDocument39 pagesSwitch: Types of Switches According To Installation MountingFernan Ortiz GattocPas encore d'évaluation
- 2SD1691 SavantICDocument3 pages2SD1691 SavantICNana Dwi WahanaPas encore d'évaluation
- Installation Instructions: If in Doubt About Electrical Installation, Consult A Licensed Electrician!Document1 pageInstallation Instructions: If in Doubt About Electrical Installation, Consult A Licensed Electrician!dayshift5Pas encore d'évaluation
- 0460 443 301 GB (Caddy TIG 2200i - Manual 2019)Document28 pages0460 443 301 GB (Caddy TIG 2200i - Manual 2019)maverick kitaroPas encore d'évaluation
- Photoelectric TG e 8 3 PDFDocument17 pagesPhotoelectric TG e 8 3 PDFWahyu IkhsannudinPas encore d'évaluation
- Introduction To: Digital Signal ProcessingDocument11 pagesIntroduction To: Digital Signal Processingdeba_bhaPas encore d'évaluation
- Alternator NotesDocument24 pagesAlternator Notesarunima arunimaPas encore d'évaluation
- LCD Repair TipsDocument51 pagesLCD Repair Tipstiukaulei100% (1)
- Negative and Anomalous Refraction inDocument166 pagesNegative and Anomalous Refraction inDaniel MoránPas encore d'évaluation
- Sheet 2Document5 pagesSheet 2Hmbs HrPas encore d'évaluation
- EQC ACR User Manual Rev07 Apr2010 FinalDocument107 pagesEQC ACR User Manual Rev07 Apr2010 FinalHans SchellmannPas encore d'évaluation
- Experiment No 2Document7 pagesExperiment No 2Krishnaa SharmaPas encore d'évaluation
- 8000-Line/Spectra Motor Control Center: Renewal Parts BulletinDocument31 pages8000-Line/Spectra Motor Control Center: Renewal Parts BulletinJesus David Rueda Espinosa100% (1)
- Datasheet LD7523 PDFDocument18 pagesDatasheet LD7523 PDFIvica ConićPas encore d'évaluation
- Data Sheet: BD136 BD138 BD140Document9 pagesData Sheet: BD136 BD138 BD140alvaroo84Pas encore d'évaluation
- Sag and Tension CalculationDocument15 pagesSag and Tension CalculationRatana Kem0% (1)
- At Home With Electricity - Test YourselfDocument3 pagesAt Home With Electricity - Test YourselfshasagailPas encore d'évaluation
- An Integrated Control Algorithm For A Single-Stage PV Pumping System Using An Open-End Winding Induction MotorDocument10 pagesAn Integrated Control Algorithm For A Single-Stage PV Pumping System Using An Open-End Winding Induction MotorHashim KhanPas encore d'évaluation
- Why Is MOSFET Voltage and BJT Current Controlled - QuoraDocument12 pagesWhy Is MOSFET Voltage and BJT Current Controlled - Quoramanish fageriaPas encore d'évaluation
- Measure DC Voltage SubtitlesDocument2 pagesMeasure DC Voltage Subtitlesguasko9035Pas encore d'évaluation
- Evaluation of Electromagnetic MetamaterialsDocument17 pagesEvaluation of Electromagnetic Metamaterialspedro1fonzecaPas encore d'évaluation