Vous aimerez peut-être aussi
- Service Manual SS700Document72 pagesService Manual SS700David Kasamba100% (1)
- Meteoro GS100Document1 pageMeteoro GS100Vítor Ávila75% (4)
- Fuzz Factory 11 Knob Clone Manual V1Document4 pagesFuzz Factory 11 Knob Clone Manual V1gilgoosPas encore d'évaluation
- ZLX Input Board (Analog)Document3 pagesZLX Input Board (Analog)caballote6350% (2)
- Roland TR909 SchematicsDocument14 pagesRoland TR909 SchematicsAlfonso Santimone100% (1)
- 1159 To 11510 UpgradeDocument16 pages1159 To 11510 UpgradeMabu DbaPas encore d'évaluation
- Epicor10 NewInstallGuide 100700Document73 pagesEpicor10 NewInstallGuide 100700colreg0% (1)
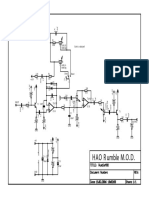
- HAO RumbleMODDocument1 pageHAO RumbleMODsoundsgrowPas encore d'évaluation
- Ecg 310aDocument1 pageEcg 310ajosuemax3Pas encore d'évaluation
- R4 Bat1 Q4 R10: Pedal de Trêmolo para Guitarra WR Kits Eng. Eletrônica 21/11/19Document1 pageR4 Bat1 Q4 R10: Pedal de Trêmolo para Guitarra WR Kits Eng. Eletrônica 21/11/19marco antonioPas encore d'évaluation
- HC2 DIY Handclap Schematics 1 0 SyntherjackDocument1 pageHC2 DIY Handclap Schematics 1 0 SyntherjackJoao Vitor Nava StorckPas encore d'évaluation
- AMIS60 Power AmpDocument1 pageAMIS60 Power AmparcocerPas encore d'évaluation
- Tweaker40 PowDocument1 pageTweaker40 PowDrazenPas encore d'évaluation
- Trinity 18watt Plexi MK - II Schematic v4Document1 pageTrinity 18watt Plexi MK - II Schematic v4Gregoria Cortes GarciaPas encore d'évaluation
- Neo400 SCHDocument1 pageNeo400 SCHEduardo FingerPas encore d'évaluation
- Asinkron PDFDocument1 pageAsinkron PDFAmelPas encore d'évaluation
- Asinkron PDFDocument1 pageAsinkron PDFAmelPas encore d'évaluation
- Orion Plus 2400-3000aDocument1 pageOrion Plus 2400-3000aArmandinho CaveroPas encore d'évaluation
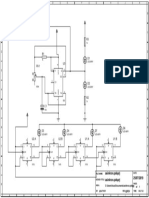
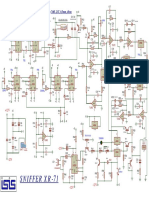
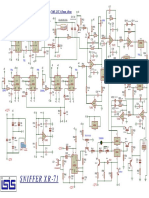
- XR 71 PDFDocument1 pageXR 71 PDFAdriano Andrade100% (1)
- XR-71 2Document1 pageXR-71 21hardwareguy67% (3)
- Detectorinduçãodepulso PDFDocument1 pageDetectorinduçãodepulso PDFAdriano AndradePas encore d'évaluation
- Con3 Con1 GND - B GND - A U1 LM386 1 2 3: VCC VCCDocument1 pageCon3 Con1 GND - B GND - A U1 LM386 1 2 3: VCC VCCMartijn van ToorPas encore d'évaluation
- GAIN +-6 DB Potensio Linier.: Decoupling Capacitor Untuk Op-Amp Tidak DigambarDocument1 pageGAIN +-6 DB Potensio Linier.: Decoupling Capacitor Untuk Op-Amp Tidak Digambar90d0n9 J4m8uPas encore d'évaluation
- Ibanez PQL SchematicsDocument1 pageIbanez PQL SchematicsSahilPas encore d'évaluation
- Ciclotron Ambw EsdDocument11 pagesCiclotron Ambw EsdTiago DiasPas encore d'évaluation
- 2 Way Crossover 24 DB-octaveDocument1 page2 Way Crossover 24 DB-octaveMamad SoheePas encore d'évaluation
- MULTIMETERS Schematic Diagram: ACV (9K /V) Dcma Batt DC (20K /V) SWDocument1 pageMULTIMETERS Schematic Diagram: ACV (9K /V) Dcma Batt DC (20K /V) SWqanhepPas encore d'évaluation
- WT631 SCHDocument1 pageWT631 SCHxxPas encore d'évaluation
- Bipolar v1Document1 pageBipolar v1Andika PrasetyaPas encore d'évaluation
- JBL Digital 12 Bu120e Pa 2000 SCHDocument1 pageJBL Digital 12 Bu120e Pa 2000 SCHbernardPas encore d'évaluation
- Low Pass Dual Ne5532Document1 pageLow Pass Dual Ne5532starly ariza collPas encore d'évaluation
- Schematic Set: 1. 8001 Display 2. 8001 Preamp 3. 8001 Relay Board 4. 8001 Power Supply 5. 8001 Output ModuleDocument6 pagesSchematic Set: 1. 8001 Display 2. 8001 Preamp 3. 8001 Relay Board 4. 8001 Power Supply 5. 8001 Output Modulepalprod100% (2)
- Xprotolab-Schematics1 4Document1 pageXprotolab-Schematics1 4morganferrariPas encore d'évaluation
- Ciclotron ENTERTECH 180L PDFDocument3 pagesCiclotron ENTERTECH 180L PDFTeles SilvaPas encore d'évaluation
- Schematic - 12V Battery Charger PDFDocument1 pageSchematic - 12V Battery Charger PDFShivu KumarPas encore d'évaluation
- Clap CKTDocument2 pagesClap CKTMunavir k100% (1)
- SHC Uart Sac24100Document2 pagesSHC Uart Sac24100bui thuy100% (1)
- 2.1 Tone Control MrigankaDocument2 pages2.1 Tone Control Mrigankaluis albertoPas encore d'évaluation
- Service Information Service Information: LaneyDocument5 pagesService Information Service Information: LaneyGladson GoesPas encore d'évaluation
- Pre Bass 3bandasDocument1 pagePre Bass 3bandasPaulo MonteiroPas encore d'évaluation
- Schematic Tpa3116d2-Xh-M543 Sheet 1 20191123193718Document1 pageSchematic Tpa3116d2-Xh-M543 Sheet 1 20191123193718dougftvc100% (2)
- Coba Tata BoardDocument1 pageCoba Tata BoardrifaiPas encore d'évaluation
- Coba Tata BoardDocument1 pageCoba Tata BoardrifaiPas encore d'évaluation
- HR MIN SEC: LDR Option (Not Included in Kit)Document1 pageHR MIN SEC: LDR Option (Not Included in Kit)Nathalis CortexPas encore d'évaluation
- مخطط شاحن شور30أمبيرDocument1 pageمخطط شاحن شور30أمبيرابراهيم حجار100% (1)
- PRE AMPLIFIER: Pre Amp - Board & Dispaly BoardDocument1 pagePRE AMPLIFIER: Pre Amp - Board & Dispaly BoardJuan FerchoPas encore d'évaluation
- TD-Java Reborn Ver.1Document5 pagesTD-Java Reborn Ver.1Nguyễn Huy ChungPas encore d'évaluation
- T Hile TransformDocument1 pageT Hile TransformPsd VisaPas encore d'évaluation
- 5V To 300B Filament 0V 5V To 300B Filament: GND GNDDocument2 pages5V To 300B Filament 0V 5V To 300B Filament: GND GNDNguyenThanhChuongPas encore d'évaluation
- 155 Od200Document2 pages155 Od200Alessandro Alcantara ReisPas encore d'évaluation
- Untitled2 PDFDocument1 pageUntitled2 PDFRenzoRiveroPas encore d'évaluation
- Plano 2 EcgDocument1 pagePlano 2 EcgDaniel Santiago Martinez VasquezPas encore d'évaluation
- Quad Channel SPP 2.2chDocument1 pageQuad Channel SPP 2.2chMushonif Marsholi100% (2)
- DDA Cs8-SchematicsDocument25 pagesDDA Cs8-SchematicsLEANDRO PINHEIRO PIUPIUPas encore d'évaluation
- C10 C12 C13 C14 C15 J5 C17: Peak On/offDocument1 pageC10 C12 C13 C14 C15 J5 C17: Peak On/offNiltoncientistaPas encore d'évaluation
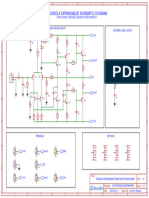
- Schematic - Videoke Set Up ROCKOLA EXPANDABLE - 2023!10!23Document1 pageSchematic - Videoke Set Up ROCKOLA EXPANDABLE - 2023!10!23Hemendra MenariaPas encore d'évaluation
- Battery BackupDocument1 pageBattery BackupLeonel MessiPas encore d'évaluation
- Schematic Rob Mods PreampDocument1 pageSchematic Rob Mods PreampArielPas encore d'évaluation
- Ciclotron Entertech DPDocument6 pagesCiclotron Entertech DPfabio VerasPas encore d'évaluation
- Generador Inductivo Y Digital: R1 R3 C3 Salida Digital. R13Document1 pageGenerador Inductivo Y Digital: R1 R3 C3 Salida Digital. R13Erick CorzoPas encore d'évaluation
- BEKO Z1J194-11 PSU Schematic For Chassis LX LCD TV PDFDocument2 pagesBEKO Z1J194-11 PSU Schematic For Chassis LX LCD TV PDFreza dian humkiPas encore d'évaluation
- DC-DC Step Down On XL4016Document1 pageDC-DC Step Down On XL4016Raghu Vutukuru100% (3)
- Bogen Amplifier - Gs-SeriesDocument20 pagesBogen Amplifier - Gs-SeriesBenjamin DoverPas encore d'évaluation
- TV Rptrs RPTR 135Document11 pagesTV Rptrs RPTR 135Benjamin DoverPas encore d'évaluation
- TV Rptrs RPTR 120revDocument12 pagesTV Rptrs RPTR 120revBenjamin DoverPas encore d'évaluation
- TV Rptrs RPTR 118Document10 pagesTV Rptrs RPTR 118Benjamin DoverPas encore d'évaluation
- TV Rptrs RPTR 121 1Document12 pagesTV Rptrs RPTR 121 1Benjamin DoverPas encore d'évaluation
- Battleship IOWA EventDocument1 pageBattleship IOWA EventBenjamin DoverPas encore d'évaluation
- Merci Train Box CarsDocument2 pagesMerci Train Box CarsBenjamin DoverPas encore d'évaluation
- TV Rptrs RPTR 122Document10 pagesTV Rptrs RPTR 122Benjamin DoverPas encore d'évaluation
- Radio Shack Pro-2040Document44 pagesRadio Shack Pro-2040Benjamin DoverPas encore d'évaluation
- ZyXEL - NAS326 - V5.21 - Ed4Document341 pagesZyXEL - NAS326 - V5.21 - Ed4Benjamin DoverPas encore d'évaluation
- M Audio Fast Track Pro ManualDocument17 pagesM Audio Fast Track Pro Manualandre2771Pas encore d'évaluation
- HR9670 Amateur Radio Emergency Preparedness ActDocument14 pagesHR9670 Amateur Radio Emergency Preparedness ActBenjamin DoverPas encore d'évaluation
- Nature Power 110 Watt Solar Panel KitDocument10 pagesNature Power 110 Watt Solar Panel KitBenjamin DoverPas encore d'évaluation
- Rca Remote Rcr412s - OmDocument21 pagesRca Remote Rcr412s - OmBenjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-111revDocument9 pagesBoulder Amateur TV Repeater's Newsletter-111revBenjamin DoverPas encore d'évaluation
- ZyXEL - NAS326 - 6Document6 pagesZyXEL - NAS326 - 6Benjamin DoverPas encore d'évaluation
- Camera Lens Sizes, Mounts & AdaptersDocument11 pagesCamera Lens Sizes, Mounts & AdaptersBenjamin DoverPas encore d'évaluation
- Hoshizaki IM-500SAA Icemaker Service ManualDocument39 pagesHoshizaki IM-500SAA Icemaker Service ManualBenjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-108Document9 pagesBoulder Amateur TV Repeater's Newsletter-108Benjamin DoverPas encore d'évaluation
- LamOmegAlph OriginalDocument2 pagesLamOmegAlph OriginalJohn Derick Bojo Hugo SabioPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-112Document13 pagesBoulder Amateur TV Repeater's Newsletter-112Benjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-110Document11 pagesBoulder Amateur TV Repeater's Newsletter-110Benjamin DoverPas encore d'évaluation
- TV Rptrs RPTR 113Document11 pagesTV Rptrs RPTR 113Benjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-109Document9 pagesBoulder Amateur TV Repeater's Newsletter-109Benjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-105Document10 pagesBoulder Amateur TV Repeater's Newsletter-105Benjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-103Document9 pagesBoulder Amateur TV Repeater's Newsletter-103Benjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-106-2Document13 pagesBoulder Amateur TV Repeater's Newsletter-106-2Benjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-107Document11 pagesBoulder Amateur TV Repeater's Newsletter-107Benjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-104Document14 pagesBoulder Amateur TV Repeater's Newsletter-104Benjamin DoverPas encore d'évaluation
- Boulder Amateur TV Repeater's Newsletter-102Document10 pagesBoulder Amateur TV Repeater's Newsletter-102Benjamin DoverPas encore d'évaluation
- D87C257 200v10Document13 pagesD87C257 200v10viv93Pas encore d'évaluation
- 15 Common PC Problems and How To Troubleshoot Them - HongkiatDocument18 pages15 Common PC Problems and How To Troubleshoot Them - Hongkiatያሲን ሁሴንPas encore d'évaluation
- Ziehm Vision R, Ziehm ImagingDocument2 pagesZiehm Vision R, Ziehm ImagingCiencia CreativaPas encore d'évaluation
- 5100 Memory Controller Hub Chipset DatasheetDocument434 pages5100 Memory Controller Hub Chipset DatasheetEdris NasihatkonPas encore d'évaluation
- Actividad 2Document19 pagesActividad 2ricardo monteroPas encore d'évaluation
- Azure DevOps Explained Get Started With Azure DevOps and Develop Your DevOps PracticesDocument497 pagesAzure DevOps Explained Get Started With Azure DevOps and Develop Your DevOps Practicesvishal jain100% (1)
- CRJQ190N65GCFDocument9 pagesCRJQ190N65GCFVadim PopovichPas encore d'évaluation
- IANA IPv4 Special-Purpose Address RegistryDocument2 pagesIANA IPv4 Special-Purpose Address RegistryEsso ProvedorPas encore d'évaluation
- Lab 3 ProcessesDocument3 pagesLab 3 ProcessesSan DipPas encore d'évaluation
- Decision Making and LoopingDocument13 pagesDecision Making and LoopingVinothini100% (1)
- BCU TR - 6MD85.rv1Document5 pagesBCU TR - 6MD85.rv1PằngPằngChiuChiuPas encore d'évaluation
- Handling of Sensor Bridge OffsetDocument6 pagesHandling of Sensor Bridge OffsetAsdrubale Mancupacapa ArrivoPas encore d'évaluation
- openSCADA ReferenceDocument6 pagesopenSCADA ReferenceVikas PhatakPas encore d'évaluation
- Air Mouse CodeDocument19 pagesAir Mouse CodeBakhtiar TiarPas encore d'évaluation
- MD070 Wells Fargo ACH 1.0Document20 pagesMD070 Wells Fargo ACH 1.0harshaPas encore d'évaluation
- TSCALE Kw-Instruktionsmanual EngDocument15 pagesTSCALE Kw-Instruktionsmanual EngSolutnor EirlPas encore d'évaluation
- Demux, Encoder, Decoder, ALUDocument25 pagesDemux, Encoder, Decoder, ALUAllan RobeyPas encore d'évaluation
- 81101a Pulse GeneratorDocument4 pages81101a Pulse GeneratorjijoviPas encore d'évaluation
- CA2E StandardsGuide ENUDocument362 pagesCA2E StandardsGuide ENUSumathi SPas encore d'évaluation
- RC10PRD 10 11 AwrDocument52 pagesRC10PRD 10 11 AwrAnonymous URVO3VDKPas encore d'évaluation
- Epicor10 MigrationGuide SQL 100700 PDFDocument115 pagesEpicor10 MigrationGuide SQL 100700 PDFVictor MotoliniaPas encore d'évaluation
- MechatronicsDocument8 pagesMechatronicsJeslet JoyPas encore d'évaluation
- HUAWEI JKM-LX1 8.2.0.102 (C185) Release NotesDocument10 pagesHUAWEI JKM-LX1 8.2.0.102 (C185) Release NotesHafiz UsmanPas encore d'évaluation
- SO65790Document5 pagesSO65790Julius NkrumahPas encore d'évaluation
- Srs of E - Book ShoppingDocument26 pagesSrs of E - Book Shoppingmahanmalik69% (29)
- L02-2LC Weighing Module InstructionDocument11 pagesL02-2LC Weighing Module InstructionRicardo Javier ZapataPas encore d'évaluation
- PSD1Document39 pagesPSD1Swati DevPas encore d'évaluation