Vous aimerez peut-être aussi
- The Art of Watch Repair - Including Descriptions of the Watch Movement, Parts of the Watch, and Common Stoppages of Wrist WatchesD'EverandThe Art of Watch Repair - Including Descriptions of the Watch Movement, Parts of the Watch, and Common Stoppages of Wrist WatchesPas encore d'évaluation
- Ackerman Steering MechanismDocument17 pagesAckerman Steering MechanismNinad Mirajgaonkar50% (2)
- The Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingD'EverandThe Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingPas encore d'évaluation
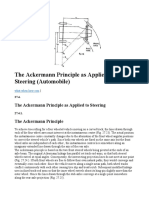
- What-When-How: The Ackermann Principle As Applied To Steering (Automobile)Document9 pagesWhat-When-How: The Ackermann Principle As Applied To Steering (Automobile)Pradyumn MangalPas encore d'évaluation
- The Ackermann Principle As Applied To SteeringDocument7 pagesThe Ackermann Principle As Applied To SteeringPS ENGINEERINGPas encore d'évaluation
- A Book of Helpful Tips on Overhauling a Vintage Engine - Including Car, Motorbike and Lawn Mower EnginesD'EverandA Book of Helpful Tips on Overhauling a Vintage Engine - Including Car, Motorbike and Lawn Mower EnginesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Steering Gears Steering Mechanisms: BY NIKHIL BAHL 2K7/ME/267 Raghav Saxena 2K7/Me/284Document34 pagesSteering Gears Steering Mechanisms: BY NIKHIL BAHL 2K7/ME/267 Raghav Saxena 2K7/Me/284Anonymous LFgO4WbIDPas encore d'évaluation
- Lab No 7 Meen21101037Document8 pagesLab No 7 Meen21101037Ali MunawarPas encore d'évaluation
- Ackermann Steering GeometryDocument3 pagesAckermann Steering Geometrydjaver100% (1)
- AutomobileDocument70 pagesAutomobileSanjay VaijPas encore d'évaluation
- Ackermann Part 1Document7 pagesAckermann Part 1NikolasPas encore d'évaluation
- AckermanDocument11 pagesAckermanVansh JainPas encore d'évaluation
- Ackermann Steering GeometryDocument3 pagesAckermann Steering Geometryanon_630379003Pas encore d'évaluation
- Mechanics Lab Assignment #3Document4 pagesMechanics Lab Assignment #3Farhan AminPas encore d'évaluation
- Chapter-Seven: Steering SystemDocument46 pagesChapter-Seven: Steering Systemyared admassuPas encore d'évaluation
- Tire Cornering Stiffness: Mchenry Software Homepage Mchenry Software Mirror SiteDocument7 pagesTire Cornering Stiffness: Mchenry Software Homepage Mchenry Software Mirror Sitetiago2fastPas encore d'évaluation
- Steering and Suspension SystemDocument15 pagesSteering and Suspension SystemVasantha SeelanPas encore d'évaluation
- 10 - Front Axle & Steering SystemDocument29 pages10 - Front Axle & Steering SystemDeep Umradiya100% (1)
- Chapter 7 Steering SystemDocument49 pagesChapter 7 Steering SystemBK MKPas encore d'évaluation
- Ackermann Steering GeometryDocument6 pagesAckermann Steering Geometry29 - Heaven JosiahPas encore d'évaluation
- The Service Manual For GearboxDocument96 pagesThe Service Manual For GearboxPeter Sanjaya100% (6)
- Steering and Suspension SystemDocument15 pagesSteering and Suspension SystemVasantha SeelanPas encore d'évaluation
- Steering Gears Steering MechanismsDocument36 pagesSteering Gears Steering MechanismsSapari VelPas encore d'évaluation
- Chapter-3 PTD NewDocument26 pagesChapter-3 PTD NewGODPas encore d'évaluation
- Castor Camber KingpinDocument7 pagesCastor Camber KingpinahamedPas encore d'évaluation
- Steering Design Investigation: Figure 1 - Ackermann Steering GeometryDocument4 pagesSteering Design Investigation: Figure 1 - Ackermann Steering GeometryHarsha SonicreignPas encore d'évaluation
- SEMINAR TOPIC:-Steering System, Ackermann and Davis Steering SystemsDocument6 pagesSEMINAR TOPIC:-Steering System, Ackermann and Davis Steering SystemsSimranjeet SinghPas encore d'évaluation
- Steering Report and Calculations 2Document12 pagesSteering Report and Calculations 2Vansh JainPas encore d'évaluation
- Design and Fabrication of Ackerman Steering Mechanism Combining With ABSDocument8 pagesDesign and Fabrication of Ackerman Steering Mechanism Combining With ABSŚhřëə ŠhřëəPas encore d'évaluation
- Ackermann Steering For Performance Race Cars PDFDocument22 pagesAckermann Steering For Performance Race Cars PDFr2d23Pas encore d'évaluation
- Good Morning .?: Presentation On Vehicle Steering Systems by Pari, D.J & K.CDocument29 pagesGood Morning .?: Presentation On Vehicle Steering Systems by Pari, D.J & K.CSrikar ChinmayaPas encore d'évaluation
- SteeringDocument36 pagesSteeringHimanshu Yadav100% (1)
- Parallelogram Steering LinkageDocument14 pagesParallelogram Steering Linkageiqbal665Pas encore d'évaluation
- Comparison With Drive Mechanisms: Cogs, Which Mesh With Another Toothed Part in Order To Transmit TorqueDocument23 pagesComparison With Drive Mechanisms: Cogs, Which Mesh With Another Toothed Part in Order To Transmit TorqueAshish DeotalePas encore d'évaluation
- Ackerman Erik ZapletalDocument23 pagesAckerman Erik ZapletalMrudula Amar WardePas encore d'évaluation
- Castor Camber KingpinDocument7 pagesCastor Camber KingpingagalixPas encore d'évaluation
- Sterring MechanismDocument3 pagesSterring MechanismPrabu BalakrishnanPas encore d'évaluation
- Study of Steering Mechanism MechanicalDocument9 pagesStudy of Steering Mechanism MechanicalSANURASAGARPas encore d'évaluation
- Steering SystemDocument15 pagesSteering Systemprasanth100% (1)
- Analysis of Hook JointsDocument13 pagesAnalysis of Hook JointsRohit GhulanavarPas encore d'évaluation
- MEEN 201101004 LAB 07 Adnan Rasheed...Document8 pagesMEEN 201101004 LAB 07 Adnan Rasheed...Zohaib Arif MehmoodPas encore d'évaluation
- Kinematics of Machines: P.Chinna Rao Assistant Professor Department of Mechanical Engineering Rgukt-Ap Iiit-SrikakulamDocument16 pagesKinematics of Machines: P.Chinna Rao Assistant Professor Department of Mechanical Engineering Rgukt-Ap Iiit-SrikakulamNarasimha KumarPas encore d'évaluation
- Ijirt154739 Paper PDFDocument4 pagesIjirt154739 Paper PDFAnuka VarshaPas encore d'évaluation
- Kart Steering, Physical Forces and Setup - Theory and PracticeDocument6 pagesKart Steering, Physical Forces and Setup - Theory and PracticeFausto TrentiniPas encore d'évaluation
- Steering FinalDocument7 pagesSteering FinalMayur PanchalPas encore d'évaluation
- Independent Front Suspension SystemDocument6 pagesIndependent Front Suspension SystemChetan SomashekarPas encore d'évaluation
- Six Bar Steering Mechanism Ijariie6847Document5 pagesSix Bar Steering Mechanism Ijariie6847SalvadorPas encore d'évaluation
- 12 Things To Know About Lifted' Suspension EngineeringDocument7 pages12 Things To Know About Lifted' Suspension EngineeringPeter SchmidtPas encore d'évaluation
- Seminar Topic:-Steering System, Ackermann and Davis Steering SystemsDocument6 pagesSeminar Topic:-Steering System, Ackermann and Davis Steering SystemsSimranjeet SinghPas encore d'évaluation
- AE Unit-3Document6 pagesAE Unit-3doddi.ajith2003Pas encore d'évaluation
- Front End Alignment - KartpediaDocument10 pagesFront End Alignment - KartpediaCODE0303456Pas encore d'évaluation
- Automobile Engineering Experiment 10: Study of Camber, Caster, Toe-In or Toe-Out CamberDocument4 pagesAutomobile Engineering Experiment 10: Study of Camber, Caster, Toe-In or Toe-Out Cambersai ChaitanyaPas encore d'évaluation
- Gears HandoutDocument28 pagesGears Handoutapi-3827852100% (3)
- Steering SystemDocument37 pagesSteering SystemSandeep Magapu100% (1)
- Ackerman Angle CalculationsDocument17 pagesAckerman Angle CalculationsSiva Murugesan50% (2)
- VD Exp-8 Q2Document3 pagesVD Exp-8 Q2UMESH HARCHANDANIPas encore d'évaluation
- MCT 311 Lesson 5Document16 pagesMCT 311 Lesson 5Moussa SaidPas encore d'évaluation
- NDT VTL-3-3Document2 pagesNDT VTL-3-3Priyesh MauryaPas encore d'évaluation
- DPP 01 Periodic Table JH Sir-3576 PDFDocument5 pagesDPP 01 Periodic Table JH Sir-3576 PDFChessPas encore d'évaluation
- System Administration JakartaDocument347 pagesSystem Administration JakartaLorena Castillero80% (10)
- Inserting Images - ShareLaTeX, Online LaTeX EditorDocument11 pagesInserting Images - ShareLaTeX, Online LaTeX EditorAviraj3892Pas encore d'évaluation
- 23-Article Text-89-3-10-20200704Document16 pages23-Article Text-89-3-10-20200704cholifah agumPas encore d'évaluation
- Tutorial - How To Use The Poser Format ExporterDocument7 pagesTutorial - How To Use The Poser Format ExporterMimhypopbummilha SwuPas encore d'évaluation
- Concrete Mix DesignDocument11 pagesConcrete Mix DesignV Vinoth Edac100% (1)
- 04 Extended Graphics DesignDocument34 pages04 Extended Graphics DesignEngenheiro AmoedoPas encore d'évaluation
- ReadmeRC8007 PDFDocument2 pagesReadmeRC8007 PDFمنير أحمدPas encore d'évaluation
- Earthquake EnginneringDocument11 pagesEarthquake EnginneringkkkPas encore d'évaluation
- Access Workshop 01Document8 pagesAccess Workshop 01movogonPas encore d'évaluation
- Diagbootx: // Public Release 1Document4 pagesDiagbootx: // Public Release 1Tedy AdhinegoroPas encore d'évaluation
- Autodesk REVIT: Training DetailsDocument3 pagesAutodesk REVIT: Training DetailsMohamed ElFarranPas encore d'évaluation
- B28 VivaDocument27 pagesB28 VivashubhamPas encore d'évaluation
- Deductive ReasoningDocument2 pagesDeductive ReasoningMariel C. BombitaPas encore d'évaluation
- LS Retail Data Director User GuideDocument28 pagesLS Retail Data Director User GuideJad EL HittiPas encore d'évaluation
- Whinner y 1990Document5 pagesWhinner y 1990LGPas encore d'évaluation
- Sensor Gaurd Installation and Maintenance ManualDocument57 pagesSensor Gaurd Installation and Maintenance ManualCapacitacion TodocatPas encore d'évaluation
- Ordered Groups and Infinite Permutation Groups PDFDocument252 pagesOrdered Groups and Infinite Permutation Groups PDFmc180401877Pas encore d'évaluation
- Lecture 4: Expert Systems: What Is An Expert System?Document5 pagesLecture 4: Expert Systems: What Is An Expert System?Zerihun BekelePas encore d'évaluation
- The Mathematical Society of Serbia - 60 YearsDocument23 pagesThe Mathematical Society of Serbia - 60 YearsBranko Ma Branko TadicPas encore d'évaluation
- Oral Histology & Embryology-FikreDocument240 pagesOral Histology & Embryology-FikreHeran A AlhadiPas encore d'évaluation
- DC DC BoostDocument21 pagesDC DC BoosttrshaaaPas encore d'évaluation
- 1SC0 2PF Exam-Paper 20180616Document20 pages1SC0 2PF Exam-Paper 20180616Thasanya AlgamaPas encore d'évaluation
- P103154 - 7.00 - Doc - Manual - 8000 WindlassDocument43 pagesP103154 - 7.00 - Doc - Manual - 8000 WindlassDanPas encore d'évaluation
- 07 Bubble BreakDocument25 pages07 Bubble BreakWeb LogueandoPas encore d'évaluation
- National Telecommunication Corporation (NTC)Document40 pagesNational Telecommunication Corporation (NTC)Faheem Sajid100% (1)
- Unit 1Document29 pagesUnit 1Biswajit MishraPas encore d'évaluation
- Measurement of Earthing Systems: Central Networks Earthing Manual Section E4Document45 pagesMeasurement of Earthing Systems: Central Networks Earthing Manual Section E4ahmed_k7117Pas encore d'évaluation
- HPLC and GC by S NarwadiyaDocument8 pagesHPLC and GC by S Narwadiyasnarwadiya100% (2)
- The ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemD'EverandThe ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemPas encore d'évaluation
- Electrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70ED'EverandElectrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70EÉvaluation : 3 sur 5 étoiles3/5 (6)
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisD'EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisÉvaluation : 5 sur 5 étoiles5/5 (1)
- Strong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerD'EverandStrong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerÉvaluation : 4 sur 5 étoiles4/5 (5)
- The Darkest White: A Mountain Legend and the Avalanche That Took HimD'EverandThe Darkest White: A Mountain Legend and the Avalanche That Took HimÉvaluation : 4 sur 5 étoiles4/5 (1)
- Practical Industrial Safety, Risk Assessment and Shutdown SystemsD'EverandPractical Industrial Safety, Risk Assessment and Shutdown SystemsÉvaluation : 4 sur 5 étoiles4/5 (11)
- The Art of Fear: Why Conquering Fear Won't Work and What to Do InsteadD'EverandThe Art of Fear: Why Conquering Fear Won't Work and What to Do InsteadÉvaluation : 4 sur 5 étoiles4/5 (10)
- Fire Fighting Pumping Systems at Industrial FacilitiesD'EverandFire Fighting Pumping Systems at Industrial FacilitiesÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Fire Protection Engineering in Building DesignD'EverandFire Protection Engineering in Building DesignÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Workbook to Accompany Maintenance & Reliability Best PracticesD'EverandWorkbook to Accompany Maintenance & Reliability Best PracticesÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- A Complete Guide to Safety Officer Interview Questions and AnswersD'EverandA Complete Guide to Safety Officer Interview Questions and AnswersÉvaluation : 4 sur 5 étoiles4/5 (1)
- Redefining Work Health and Safety: Systems, Strategies, and Progressive ApproachesD'EverandRedefining Work Health and Safety: Systems, Strategies, and Progressive ApproachesPas encore d'évaluation
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsD'EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsPas encore d'évaluation
- Higher Love: Climbing and Skiing the Seven SummitsD'EverandHigher Love: Climbing and Skiing the Seven SummitsÉvaluation : 5 sur 5 étoiles5/5 (5)
- Rules of Thumb for Maintenance and Reliability EngineersD'EverandRules of Thumb for Maintenance and Reliability EngineersÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- The Invisible Rainbow: A History of Electricity and LifeD'EverandThe Invisible Rainbow: A History of Electricity and LifeÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- Fundamentals of Risk Management for Process Industry EngineersD'EverandFundamentals of Risk Management for Process Industry EngineersPas encore d'évaluation
- Introduction to Petroleum Process SafetyD'EverandIntroduction to Petroleum Process SafetyÉvaluation : 3 sur 5 étoiles3/5 (2)
- Climb to Conquer: The Untold Story of WWII's 10th Mountain Division Ski TroopsD'EverandClimb to Conquer: The Untold Story of WWII's 10th Mountain Division Ski TroopsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Culture, Health and Illness: An Introduction for Health ProfessionalsD'EverandCulture, Health and Illness: An Introduction for Health ProfessionalsPas encore d'évaluation