Vous aimerez peut-être aussi
- La ecuación general de segundo grado en dos y tres variablesD'EverandLa ecuación general de segundo grado en dos y tres variablesPas encore d'évaluation
- 05 Cap IV Vector de CargasDocument45 pages05 Cap IV Vector de CargasMaxwell Galvez Chocce100% (1)
- Analisis Matricial de Estructuras Solucion Cap IVDocument37 pagesAnalisis Matricial de Estructuras Solucion Cap IVharol100% (3)
- Soluciòn Del Onceavo Capítulo de Anàlisis Estructural IiDocument26 pagesSoluciòn Del Onceavo Capítulo de Anàlisis Estructural IiLUis GuiLlermo GambOa ContreRasPas encore d'évaluation
- Solucion Cap Vii Combinado PDFDocument8 pagesSolucion Cap Vii Combinado PDFJhonn OrdoñezPas encore d'évaluation
- Soluciòn Del Tercer Capítulo de Anàlisis Estructural IiDocument13 pagesSoluciòn Del Tercer Capítulo de Anàlisis Estructural IiRafaelHuamanPas encore d'évaluation
- Analisis EstructuralDocument21 pagesAnalisis Estructuralcuchoquesera0% (1)
- Prob. Prop CAP III (Aguiar)Document16 pagesProb. Prop CAP III (Aguiar)harolPas encore d'évaluation
- Trabajo N5Document44 pagesTrabajo N5Jacob Morales QuispePas encore d'évaluation
- Cap 7Document9 pagesCap 7Anonymous 1fKeMfwFPas encore d'évaluation
- Solucionario Roberto AguiarDocument18 pagesSolucionario Roberto AguiarJacob Morales Quispe55% (11)
- Trabajo N2 Analisis Estructural PDFDocument20 pagesTrabajo N2 Analisis Estructural PDFJacob Morales QuispePas encore d'évaluation
- CAPITULO VI EstructurasDocument27 pagesCAPITULO VI EstructurasmaferojaPas encore d'évaluation
- Analisis Estructural Solucionario Roberto AguiarDocument12 pagesAnalisis Estructural Solucionario Roberto AguiarHans Lagos100% (2)
- Tabla de Empotramiento Perfecto: WL 30 WL 20 WL 12 WL 12Document1 pageTabla de Empotramiento Perfecto: WL 30 WL 20 WL 12 WL 12Fabiano PazPas encore d'évaluation
- Clase 05 VigasDocument35 pagesClase 05 VigasSantiago Suarez MoralesPas encore d'évaluation
- Vibración Libre - Ing. SismorresistenteDocument15 pagesVibración Libre - Ing. SismorresistenteAlcides Hermoza MejiaPas encore d'évaluation
- Informe de Trabajo SismosDocument44 pagesInforme de Trabajo SismosCONAN AURELIO PAUCAR CORONADOPas encore d'évaluation
- ANALISIS MATRICIAL DE ESTRUCTURAS CAP I (Aguiar)Document6 pagesANALISIS MATRICIAL DE ESTRUCTURAS CAP I (Aguiar)harol100% (1)
- Prob. Prop CAP II (Aguiar)Document9 pagesProb. Prop CAP II (Aguiar)harolPas encore d'évaluation
- Soluciòn Del Quinto Capítulo de Anàlisis Estructural IiDocument7 pagesSoluciòn Del Quinto Capítulo de Anàlisis Estructural IiRafaelHuamanPas encore d'évaluation
- Analisis-Estructural 2-Alejandro Muñoz PUCPDocument44 pagesAnalisis-Estructural 2-Alejandro Muñoz PUCPJorge Salas Chau100% (2)
- Trabajo n2 Analisis EstructuralDocument20 pagesTrabajo n2 Analisis EstructuralJacob Morales QuispePas encore d'évaluation
- Resolución de Ejercicios Propuestos en El Segundo Capitulo Del Libro Análisis Matricial de Roberto Aguiar FalconiDocument28 pagesResolución de Ejercicios Propuestos en El Segundo Capitulo Del Libro Análisis Matricial de Roberto Aguiar FalconiEmiliano100% (1)
- Ex Susti 2015 2Document1 pageEx Susti 2015 2joel moreno carboneroPas encore d'évaluation
- Pontificia Universidad Catolica Del EcuaDocument62 pagesPontificia Universidad Catolica Del EcuaGino Simons100% (1)
- Solucion Cap VDocument42 pagesSolucion Cap VharolPas encore d'évaluation
- Soluciòn Del Onceavo Capítulo de Anàlisis Estructural IiDocument29 pagesSoluciòn Del Onceavo Capítulo de Anàlisis Estructural IiRafaelHuaman100% (1)
- Arquitectura 1er TrabajoDocument20 pagesArquitectura 1er TrabajoNilson Eduardo AyalaPas encore d'évaluation
- Ejercicios de Sismo ResueltoDocument14 pagesEjercicios de Sismo ResueltoLuis Ariel Marca MatiasPas encore d'évaluation
- Resolución de Roberto Aguiar Cap 7Document6 pagesResolución de Roberto Aguiar Cap 7Moises Vila ChocosPas encore d'évaluation
- Problemas de Dinamica Estructural Con Un Grado de LibertadDocument8 pagesProblemas de Dinamica Estructural Con Un Grado de LibertadSiglinda Adriana Cortez la FuentePas encore d'évaluation
- Ejercicios de Matriz de FlexibilidadDocument6 pagesEjercicios de Matriz de FlexibilidadEduardo Chavarry LlontopPas encore d'évaluation
- 0822 Transportes Clase 05 Analisis de Segmentos e InterseccionesDocument25 pages0822 Transportes Clase 05 Analisis de Segmentos e Interseccionesalexivan_cgPas encore d'évaluation
- Informe 1 Fluidos 1 FIC-UNIDocument39 pagesInforme 1 Fluidos 1 FIC-UNIRuben MelgarejoPas encore d'évaluation
- Trabajo de Analisis Estructural II n2Document12 pagesTrabajo de Analisis Estructural II n2Jhonatan Casafranca LuzaPas encore d'évaluation
- Ejercicios Propuestos de Alcantarillado PDFDocument13 pagesEjercicios Propuestos de Alcantarillado PDFThati Mendoza0% (1)
- Solucionario Del Segundo Trabajo de Análisis Estructural IIDocument7 pagesSolucionario Del Segundo Trabajo de Análisis Estructural IIkevinPas encore d'évaluation
- Tarea 2 FDC - Ejercicios Del Cap 4 Matriz de Rigidez-1Document17 pagesTarea 2 FDC - Ejercicios Del Cap 4 Matriz de Rigidez-1Jonathan Rodriguez MejiaPas encore d'évaluation
- Exámenes de Análisis EstructuralDocument4 pagesExámenes de Análisis EstructuralAlexander Edison Calsin Condori50% (4)
- Ejercicios de Resueltos Por Método de Tres Momentos (Resistencia de Materiales)Document27 pagesEjercicios de Resueltos Por Método de Tres Momentos (Resistencia de Materiales)Ronald CordovaPas encore d'évaluation
- Método de Las Fuerzas Pórtico HiperestáticoDocument2 pagesMétodo de Las Fuerzas Pórtico HiperestáticoMaximiliano ArrasinPas encore d'évaluation
- VIBRACIÓN LIBRE NO AMORTIGUADA - v1Document2 pagesVIBRACIÓN LIBRE NO AMORTIGUADA - v1Hermann0% (1)
- Libro - Analisis EstructuralDocument53 pagesLibro - Analisis EstructuralKatia Angela Hinostroza Tolentino100% (1)
- Clase 01 MECÁNICA DE SUELOS II UNSCHDocument14 pagesClase 01 MECÁNICA DE SUELOS II UNSCHRichard PalominoPas encore d'évaluation
- Introduccion Al Analisis Matricial Tridimensional PDFDocument9 pagesIntroduccion Al Analisis Matricial Tridimensional PDFJuniorLeonPas encore d'évaluation
- Plantillan3 PDFDocument4 pagesPlantillan3 PDFJames Paul Garcia BendezuPas encore d'évaluation
- Capitulo 21 PDFDocument20 pagesCapitulo 21 PDFING.CIVILPas encore d'évaluation
- Evaluación Final - 2020-20ADocument3 pagesEvaluación Final - 2020-20AYeltsin SanabriaPas encore d'évaluation
- Ejercicios ResueltosDocument46 pagesEjercicios ResueltosDavid Acuña YarangaPas encore d'évaluation
- Resistencia de Materiales Clase 1Document7 pagesResistencia de Materiales Clase 1Jose Alberto Oporto ZeballosPas encore d'évaluation
- Solucionario Analisis Estructural IiDocument56 pagesSolucionario Analisis Estructural IiING.CIVILPas encore d'évaluation
- Tabla de Integrales InmediatasDocument2 pagesTabla de Integrales InmediatasLICEO SAMANIEGOPas encore d'évaluation
- Superposición Estabilidad 2Document5 pagesSuperposición Estabilidad 2Felix MarichalarPas encore d'évaluation
- Integracion de Funciones Trigonometricas: Curso: Cálculo IiDocument11 pagesIntegracion de Funciones Trigonometricas: Curso: Cálculo IiVargas MarcPas encore d'évaluation
- Tabla de IntegralesDocument4 pagesTabla de IntegralesJhon Brayan Quisbert CalderónPas encore d'évaluation
- Pauta Primera PruebaDocument3 pagesPauta Primera PruebaIGNACIO ARAYA JAMETTPas encore d'évaluation
- Cuadernillo Cálculo Integral 3er Parcial 2022Document8 pagesCuadernillo Cálculo Integral 3er Parcial 2022Aris OrtizPas encore d'évaluation
- Sesión 7 (Volumen de Un Solido de Revolución)Document9 pagesSesión 7 (Volumen de Un Solido de Revolución)Edilberto ChambiPas encore d'évaluation
- Centro Temporal Covid-REV 03Document1 pageCentro Temporal Covid-REV 03Hans LagosPas encore d'évaluation
- PLAN COVID 19 - Contruccion de Centro de Salud de PichariDocument86 pagesPLAN COVID 19 - Contruccion de Centro de Salud de Picharijulio vPas encore d'évaluation
- GOB-IN-001-17 Panel Fotografico UranmarcaDocument4 pagesGOB-IN-001-17 Panel Fotografico UranmarcaHans LagosPas encore d'évaluation
- 1.0 Planilla de Metrados Adicional 10Document5 pages1.0 Planilla de Metrados Adicional 10Hans LagosPas encore d'évaluation
- Calendario Cocharcas ReduccionDocument5 pagesCalendario Cocharcas ReduccionHans LagosPas encore d'évaluation
- Separadores 04Document28 pagesSeparadores 04Hans LagosPas encore d'évaluation
- VM 4X2 R Muelles E5 3950Document2 pagesVM 4X2 R Muelles E5 3950Hans LagosPas encore d'évaluation
- Cronograma CPM CanariaDocument2 pagesCronograma CPM CanariaHans LagosPas encore d'évaluation
- Acero y MaderaDocument62 pagesAcero y MaderaHans LagosPas encore d'évaluation
- Canal de Derivacion Yanama Con Topo Del et-PCE-01 (A1)Document1 pageCanal de Derivacion Yanama Con Topo Del et-PCE-01 (A1)Hans LagosPas encore d'évaluation
- 6.0.4 SECCION TIPO-Layout3Document1 page6.0.4 SECCION TIPO-Layout3Hans LagosPas encore d'évaluation
- Camara de Inpeccion TapaDocument1 pageCamara de Inpeccion TapaHans LagosPas encore d'évaluation
- Charla HoyDocument1 pageCharla HoyHans LagosPas encore d'évaluation
- CAO Valorizado CanariaDocument8 pagesCAO Valorizado CanariaHans LagosPas encore d'évaluation
- Metrados Churrulla Junio 04Document6 pagesMetrados Churrulla Junio 04Hans LagosPas encore d'évaluation
- Diapocitiva-Arquitectura LegalllllllllllllllllDocument18 pagesDiapocitiva-Arquitectura LegalllllllllllllllllHans LagosPas encore d'évaluation
- PL Ubicacion Pu-01 - A2-1Document1 pagePL Ubicacion Pu-01 - A2-1Hans LagosPas encore d'évaluation
- Cropwat ManualDocument2 pagesCropwat ManualHans LagosPas encore d'évaluation
- Topografico Autocad TP A1Document1 pageTopografico Autocad TP A1Hans LagosPas encore d'évaluation
- Unidad 02.2 Series de TiempoDocument14 pagesUnidad 02.2 Series de TiempoHans LagosPas encore d'évaluation
- Manual de Usuario CROPWATDocument29 pagesManual de Usuario CROPWATapi-3708264100% (5)
- Modelo DiapositivaDocument11 pagesModelo DiapositivaHans LagosPas encore d'évaluation
- Caratula - SrecursosDocument2 pagesCaratula - SrecursosHans LagosPas encore d'évaluation
- Modelo DiapositivaDocument15 pagesModelo DiapositivaHans LagosPas encore d'évaluation
- Diapocitiva ArquitecturaDocument24 pagesDiapocitiva ArquitecturaHans LagosPas encore d'évaluation
- 013 Planilla de Metrado Especialidad Estructuras - IiDocument205 pages013 Planilla de Metrado Especialidad Estructuras - IiLenin SmithPas encore d'évaluation
- LagosDocument1 pageLagosHans LagosPas encore d'évaluation
- Memoria CalculoDocument46 pagesMemoria CalculoHans LagosPas encore d'évaluation
- Memoria CalculoDocument46 pagesMemoria CalculoHans LagosPas encore d'évaluation
- Informe Legal Alba IleriaDocument58 pagesInforme Legal Alba IleriaHans LagosPas encore d'évaluation
- S, Uelso TeoriaDocument282 pagesS, Uelso TeoriaLenny Arias QPas encore d'évaluation
- Instructivo - Nota 4 - Investigacion - ActualizadaDocument3 pagesInstructivo - Nota 4 - Investigacion - ActualizadaNancy Castro100% (1)
- Alteraciones en Las Funciones Ejecutivas en Helen KellerDocument2 pagesAlteraciones en Las Funciones Ejecutivas en Helen KellerKaren KyllianPas encore d'évaluation
- Ficha Valor Posicional para Tercero de PrimariaDocument7 pagesFicha Valor Posicional para Tercero de PrimariaToya Angarita Camargo100% (1)
- Actividad 3 - Los ConectoresDocument2 pagesActividad 3 - Los ConectoresArnaldo Serna17Pas encore d'évaluation
- Itinerario-Salida-Pedagogica-Parque Amaru 2019Document8 pagesItinerario-Salida-Pedagogica-Parque Amaru 2019PABLO ANDRES VIRI AVILAPas encore d'évaluation
- Hexacta Austral PDFDocument38 pagesHexacta Austral PDFJuan Manuel GutierrezPas encore d'évaluation
- ?3° EDU-VACACIONES - CUADERNILLO VACACIONAL - ?esmeralda Te Enseña? - ?Document22 pages?3° EDU-VACACIONES - CUADERNILLO VACACIONAL - ?esmeralda Te Enseña? - ?Axel HernándezPas encore d'évaluation
- Actividad TareaDocument6 pagesActividad TareaJeisson MendozaPas encore d'évaluation
- El Yo Social (Tutoria)Document33 pagesEl Yo Social (Tutoria)Liliana Carrillo Lopez100% (2)
- LA CAMARA DE REFLEXION 2 ParteDocument7 pagesLA CAMARA DE REFLEXION 2 ParteripichipPas encore d'évaluation
- Función Biológica, Educativa, Economica, SocializadoraDocument3 pagesFunción Biológica, Educativa, Economica, SocializadoraLorenz Alvarado50% (2)
- Software de Cómputo NuméricoDocument3 pagesSoftware de Cómputo NuméricoRedes Computadores Sena TunjaPas encore d'évaluation
- 05 - Sistema Osteomuscular-4 PDFDocument5 pages05 - Sistema Osteomuscular-4 PDFJacqueline Lorena Gonzalez DuartePas encore d'évaluation
- 3 Propiedades de La Roca IntactaDocument45 pages3 Propiedades de La Roca IntactafranciscoPas encore d'évaluation
- Párrafos y Oraciones-30 de NoviembreDocument2 pagesPárrafos y Oraciones-30 de NoviembreFlor CorreaPas encore d'évaluation
- Tyley y TabaDocument1 pageTyley y TabaPers TalaveraPas encore d'évaluation
- 1.0 Resolucion GCI 501 Manual Manto InfraestructuraDocument25 pages1.0 Resolucion GCI 501 Manual Manto Infraestructura245470Pas encore d'évaluation
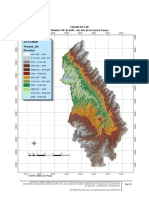
- CUENCA DEL RIO ICA ofDocument16 pagesCUENCA DEL RIO ICA ofJanny McjPas encore d'évaluation
- Diagnóstico - LeeDocument5 pagesDiagnóstico - LeeMatias DesposorioPas encore d'évaluation
- Análisis Del Plan de Control y Seguimiento en La Ejecución de Obras Civiles de Grades SuperficiesDocument5 pagesAnálisis Del Plan de Control y Seguimiento en La Ejecución de Obras Civiles de Grades SuperficiesLuigui OrosteguiPas encore d'évaluation
- Eficiencia Luminosa Espectral PDFDocument5 pagesEficiencia Luminosa Espectral PDFAgustin NuñezPas encore d'évaluation
- Sociedad Tradicional VigenteDocument5 pagesSociedad Tradicional VigenteRafaelPas encore d'évaluation
- Equipos para El Proceso de Filtración de TortaDocument5 pagesEquipos para El Proceso de Filtración de TortaFranco Gonzales CarasasPas encore d'évaluation
- Tesis Doctoral para CgpiDocument245 pagesTesis Doctoral para Cgpikov709324Pas encore d'évaluation
- Cómo Convertir La Falta de Experiencia Por Ser Joven en Una Virtud para La Empresa - HBRDocument4 pagesCómo Convertir La Falta de Experiencia Por Ser Joven en Una Virtud para La Empresa - HBRJesus BriceñoPas encore d'évaluation
- Ciencias Sociales Once Guía 2 Unidad 1Document20 pagesCiencias Sociales Once Guía 2 Unidad 1sofia gallego mejiaPas encore d'évaluation
- 01 Charlas de 5 Minutos SST-Enero 2014Document24 pages01 Charlas de 5 Minutos SST-Enero 2014Jubert A Yangali SotoPas encore d'évaluation
- Tema 3 Aprendizaje Asociativo Mediante Condicionamiento ClasicoDocument64 pagesTema 3 Aprendizaje Asociativo Mediante Condicionamiento ClasicoIrene RodriguezPas encore d'évaluation
- Acuse - CITA2023 VIB 000001904722Document2 pagesAcuse - CITA2023 VIB 000001904722Gaspar BalderramaPas encore d'évaluation