Vous aimerez peut-être aussi
- Member resistance under combined bi-axial bending and axial compressionDocument12 pagesMember resistance under combined bi-axial bending and axial compressionrd radenPas encore d'évaluation
- Mathcad - 06. Analysis of T BeamDocument3 pagesMathcad - 06. Analysis of T BeamMrAlittle FingerPas encore d'évaluation
- Example 1.1: Reinforced Concrete Design IV-Fourth Year-Civil EngineeringDocument12 pagesExample 1.1: Reinforced Concrete Design IV-Fourth Year-Civil EngineeringAhmed NasratPas encore d'évaluation
- Som FormulasDocument20 pagesSom FormulasAnil NethaPas encore d'évaluation
- Transverse Shear-Build Up SectionsDocument8 pagesTransverse Shear-Build Up SectionsKavish DayaPas encore d'évaluation
- Frame Analysis: Determine Natural Periods and Design Base Shear ForcesDocument6 pagesFrame Analysis: Determine Natural Periods and Design Base Shear Forcesnial69100% (1)
- Structural dynamics problems and solutionsDocument8 pagesStructural dynamics problems and solutionsamadeus135Pas encore d'évaluation
- Module 6Document104 pagesModule 6rabih87Pas encore d'évaluation
- (1972) Plastic Analysis of Castellated Beams-II. Analysis and TestsDocument30 pages(1972) Plastic Analysis of Castellated Beams-II. Analysis and TestsmikarcePas encore d'évaluation
- Earthquake Load Calculation (Base Shear Method) : Rigid FrameDocument4 pagesEarthquake Load Calculation (Base Shear Method) : Rigid FrameJohn Rheynor MayoPas encore d'évaluation
- Chapter6 StiffnessMethodDocument11 pagesChapter6 StiffnessMethodkaranfilhasanPas encore d'évaluation
- تصميم الكمرات بطريقة ultimate PDFDocument42 pagesتصميم الكمرات بطريقة ultimate PDFqaisalkurdyPas encore d'évaluation
- Deep Beam PPT SeminarDocument30 pagesDeep Beam PPT SeminarKrishan Dutt YadavPas encore d'évaluation
- Beam Column Joint IIT RoorkeeDocument109 pagesBeam Column Joint IIT RoorkeeMayank RajputPas encore d'évaluation
- 139C-Modelling of Reinforced Concrete structures-KAMIŃSKI-2011Document14 pages139C-Modelling of Reinforced Concrete structures-KAMIŃSKI-2011Ziyad12Pas encore d'évaluation
- On Finite Element Analysis of Nonlinear Consolidation by Himawan SupangkatDocument88 pagesOn Finite Element Analysis of Nonlinear Consolidation by Himawan Supangkatde_wightPas encore d'évaluation
- M.Tech Civil (Structural Engineering) Course DetailsDocument25 pagesM.Tech Civil (Structural Engineering) Course DetailspraveennagarajanPas encore d'évaluation
- Elastic Lateral Torsional BucklingDocument3 pagesElastic Lateral Torsional BucklingRuchit ParmarPas encore d'évaluation
- Ib RCC StructuresDocument12 pagesIb RCC StructuresRaj BakhtaniPas encore d'évaluation
- Moment Curvature CharacteristicsDocument17 pagesMoment Curvature CharacteristicsAlex100% (1)
- Mathcad - 04. Analysis of Doubly Reinforced Concrete BeamDocument3 pagesMathcad - 04. Analysis of Doubly Reinforced Concrete BeamMrAlittle FingerPas encore d'évaluation
- 2-Design For Action Effects - M & N (2014)Document15 pages2-Design For Action Effects - M & N (2014)george santiagoPas encore d'évaluation
- 1 - Matrix Method of Structural AnalysisDocument5 pages1 - Matrix Method of Structural AnalysistrixiaPas encore d'évaluation
- Modeling SCB Frames Using Beam-Column Elements: January 2013Document28 pagesModeling SCB Frames Using Beam-Column Elements: January 2013Maha Moddather Hassan100% (1)
- Fundamentals of Photoelastic Stress AnalysisDocument48 pagesFundamentals of Photoelastic Stress AnalysiserickPas encore d'évaluation
- MEEN 673 Nonlinear Finite Element Analysis: Read: Nonlinear Bending of Strait BeamsDocument39 pagesMEEN 673 Nonlinear Finite Element Analysis: Read: Nonlinear Bending of Strait Beams曲健Pas encore d'évaluation
- Buckling of Column: Saifulnizan JamianDocument24 pagesBuckling of Column: Saifulnizan JamianNazhan HaziqPas encore d'évaluation
- Design of Doubly Reinforced BeamDocument7 pagesDesign of Doubly Reinforced BeamAmrutha SivaramanPas encore d'évaluation
- Beams On Elastic FoundationDocument20 pagesBeams On Elastic FoundationShashi Bhushan KumarPas encore d'évaluation
- Fig. 8.5.2a-Typical Stirrup Shapes For Girders and Beams. Fig. 8.5.2b-Typical Stirrup Shape For Joists, in Addition To Fig. 8.5.2aDocument4 pagesFig. 8.5.2a-Typical Stirrup Shapes For Girders and Beams. Fig. 8.5.2b-Typical Stirrup Shape For Joists, in Addition To Fig. 8.5.2aAdolfo OrellanaPas encore d'évaluation
- DESIGN & DETAILING OF THE SHEAR WALL - FINAL - WITH EXAMPLE (Autosaved)Document32 pagesDESIGN & DETAILING OF THE SHEAR WALL - FINAL - WITH EXAMPLE (Autosaved)Danie Roy100% (1)
- Mat Chapter 18Document29 pagesMat Chapter 18hemant_durgawalePas encore d'évaluation
- Composite Columns Design GuideDocument66 pagesComposite Columns Design Guideabdelrahman emadPas encore d'évaluation
- Pankow Report 1 - Purdue University - Dual Plate Composite Shear WallDocument350 pagesPankow Report 1 - Purdue University - Dual Plate Composite Shear Wallvodugu123Pas encore d'évaluation
- Solved Examples On Seismic Evaluation-V1.0Document45 pagesSolved Examples On Seismic Evaluation-V1.0sanket100% (1)
- BeamExamples 368Document13 pagesBeamExamples 368Brian VisserPas encore d'évaluation
- Finite Element Analysis of Eccentric R.C.C FootingDocument72 pagesFinite Element Analysis of Eccentric R.C.C FootingJunaidAhmedPas encore d'évaluation
- Introduction To Seismic Essentials in GroningenDocument14 pagesIntroduction To Seismic Essentials in GroningenKay Chan SothearaPas encore d'évaluation
- British Problem 5 PDFDocument5 pagesBritish Problem 5 PDFelixnzPas encore d'évaluation
- Pile Capacity Calculation As Per IS2911 For Ø600mm-24mDocument33 pagesPile Capacity Calculation As Per IS2911 For Ø600mm-24mPrakash Singh RawalPas encore d'évaluation
- Beam Analysis Using Stiffness MethodDocument148 pagesBeam Analysis Using Stiffness MethodArif WaitsPas encore d'évaluation
- Moment Redistribution in BeamsDocument12 pagesMoment Redistribution in BeamsChukwuka WayemeruPas encore d'évaluation
- DDA 3164 BEAM Shear Deflection and CrackDocument20 pagesDDA 3164 BEAM Shear Deflection and CrackZayyan RomjonPas encore d'évaluation
- Elastic Analysis & Application Tables of Rectangular Plates (Artigo-Papanikolaou)Document20 pagesElastic Analysis & Application Tables of Rectangular Plates (Artigo-Papanikolaou)MelekeenPas encore d'évaluation
- Ultimate Strength Design USD of BeamDocument15 pagesUltimate Strength Design USD of BeamJohn Carl Salas100% (1)
- Compression Members Problems - PDFDocument15 pagesCompression Members Problems - PDFNIKHIL BANDWALPas encore d'évaluation
- Ramset Specifiers Anchoring Resource Book ANZ - TruBolt Mechanical AnchoringDocument10 pagesRamset Specifiers Anchoring Resource Book ANZ - TruBolt Mechanical AnchoringjlolhnpPas encore d'évaluation
- "Rectbeam" - Rectangular Concrete Beam Analysis/Design: Program DescriptionDocument46 pages"Rectbeam" - Rectangular Concrete Beam Analysis/Design: Program DescriptionOswaldo SuarezPas encore d'évaluation
- Design and Behavior of Gusset Plate Connections PDFDocument12 pagesDesign and Behavior of Gusset Plate Connections PDFAnkit GuptaPas encore d'évaluation
- Modal Analysis of a Three-Story BuildingDocument7 pagesModal Analysis of a Three-Story Buildingingeni0sPas encore d'évaluation
- Structural Dynamics UpdatedDocument24 pagesStructural Dynamics UpdatedatifPas encore d'évaluation
- Short Notes Unit - 2-FEMDocument33 pagesShort Notes Unit - 2-FEMgurumahesh gPas encore d'évaluation
- Pre Stressed Modal Analysis Using FiniteDocument8 pagesPre Stressed Modal Analysis Using Finitegreat2008Pas encore d'évaluation
- Variational NBDocument19 pagesVariational NBSimon SiuPas encore d'évaluation
- P. Sollero and M. H. Aliabadi. 1993. Fracture Mechanics Analysis of Anisotropic Plates by The Boundary Element Method.Document16 pagesP. Sollero and M. H. Aliabadi. 1993. Fracture Mechanics Analysis of Anisotropic Plates by The Boundary Element Method.Leonardo BernardoPas encore d'évaluation
- Computational Solid Mechanics Project 4 - Simplicial ElementsDocument3 pagesComputational Solid Mechanics Project 4 - Simplicial ElementsSuraj JayswalPas encore d'évaluation
- Paper Papp Szalai FinalDocument7 pagesPaper Papp Szalai FinalGrzesiek GórnikPas encore d'évaluation
- Solving Underdetermined Nonlinear Equations by Newton-Like MethodDocument22 pagesSolving Underdetermined Nonlinear Equations by Newton-Like MethodMr. KPas encore d'évaluation
- Optimal Truss Design Including Plastic Collapse ConstraintsDocument8 pagesOptimal Truss Design Including Plastic Collapse Constraintscasoj29Pas encore d'évaluation
- ADMM For Combinatorial Graph Problems: PreprintDocument20 pagesADMM For Combinatorial Graph Problems: Preprintrupaj nayakPas encore d'évaluation
- Antenna Product Specifications: Electric PerformanceDocument1 pageAntenna Product Specifications: Electric PerformanceJulián GiménezPas encore d'évaluation
- A07S06HAC Datasheet: Quick SpecsDocument3 pagesA07S06HAC Datasheet: Quick SpecsflacocPas encore d'évaluation
- A15S12HAC Datasheet: Order Now Get A QuoteDocument1 pageA15S12HAC Datasheet: Order Now Get A QuoteflacocPas encore d'évaluation
- 5NPX1006FDocument3 pages5NPX1006FVishwa Sathanjaya AnandawanshaPas encore d'évaluation
- Bxa 80063 8CFDocument1 pageBxa 80063 8CFFrancisco NascimentoPas encore d'évaluation
- Get the A23S06HAC Microwave Antenna DatasheetDocument3 pagesGet the A23S06HAC Microwave Antenna DatasheethadiPas encore d'évaluation
- A11D18HS Datasheet: Order Now Get A QuoteDocument1 pageA11D18HS Datasheet: Order Now Get A QuoteflacocPas encore d'évaluation
- A07S06HAC Datasheet: Quick SpecsDocument3 pagesA07S06HAC Datasheet: Quick SpecsflacocPas encore d'évaluation
- A11D18HS Datasheet: Order Now Get A QuoteDocument1 pageA11D18HS Datasheet: Order Now Get A QuoteflacocPas encore d'évaluation
- A07D30HSDocument1 pageA07D30HSGilmerPas encore d'évaluation
- Antenna Product Specifications: Electric PerformanceDocument1 pageAntenna Product Specifications: Electric PerformanceAntony López GálvezPas encore d'évaluation
- A07D06HAC Datasheet: Order Now Get A QuoteDocument1 pageA07D06HAC Datasheet: Order Now Get A QuoteflacocPas encore d'évaluation
- COORDENADASDocument3 pagesCOORDENADASflacocPas encore d'évaluation
- vhlpx2 15 Rr1aDocument1 pagevhlpx2 15 Rr1aflacocPas encore d'évaluation
- DS Ant Tna990a10ri 180914 enDocument3 pagesDS Ant Tna990a10ri 180914 enMartín Córdoba GetarPas encore d'évaluation
- Creedence Clearwater Revival - Guitar AnthologyDocument90 pagesCreedence Clearwater Revival - Guitar Anthologyapepe987100% (2)
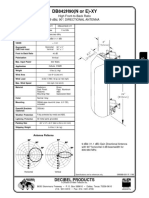
- DB842H90 (N or E) - XYDocument1 pageDB842H90 (N or E) - XYflacocPas encore d'évaluation
- Azimuth de AntenasDocument7 pagesAzimuth de AntenasflacocPas encore d'évaluation
- Vulnerabilidad Eolica PDFDocument55 pagesVulnerabilidad Eolica PDFMultiproposito MultipropositoPas encore d'évaluation
- Plate shear rupture strength limitDocument6 pagesPlate shear rupture strength limitflacocPas encore d'évaluation
- Datasheet Antenas RfsDocument24 pagesDatasheet Antenas RfsJesús'MacuarePas encore d'évaluation
- Analisis Edificio FEMA P-752 - Unit4Document505 pagesAnalisis Edificio FEMA P-752 - Unit4alexmolina3Pas encore d'évaluation
- Antena RFS - SB4W60AD PDFDocument2 pagesAntena RFS - SB4W60AD PDFflacocPas encore d'évaluation
- SEISMIC-Provision For Structural Steel Buildings-Suppl-2 PDFDocument35 pagesSEISMIC-Provision For Structural Steel Buildings-Suppl-2 PDFutsav_koshtiPas encore d'évaluation
- Dolsek VEESD PaperID 480Document9 pagesDolsek VEESD PaperID 480flacocPas encore d'évaluation
- Earthquake-Resistant Design ConceptsDocument14 pagesEarthquake-Resistant Design ConceptsvjekosimPas encore d'évaluation
- Earth Eqake Resistence-Buidng Tips-IIT KANPUR-BESTDocument2 pagesEarth Eqake Resistence-Buidng Tips-IIT KANPUR-BESTbasavarajkvPas encore d'évaluation
- P-749 Chapter3 PDFDocument8 pagesP-749 Chapter3 PDFflacocPas encore d'évaluation
- Future Directions in Earthquake EngineeringDocument4 pagesFuture Directions in Earthquake EngineeringflacocPas encore d'évaluation
- P 749 Chapter2Document22 pagesP 749 Chapter2flacocPas encore d'évaluation
- Models 69NT40-511-300 To 309, 69NT40-511-311 To 399Document117 pagesModels 69NT40-511-300 To 309, 69NT40-511-311 To 399cloviskrelling100% (2)
- What is TDB, TWB & PsychrometricsDocument1 pageWhat is TDB, TWB & PsychrometricsYasna Guiñez HerreraPas encore d'évaluation
- Citizen A16VI Machine SpecificationsDocument2 pagesCitizen A16VI Machine SpecificationscmganklPas encore d'évaluation
- B21et Pea BOMDocument9 pagesB21et Pea BOMvanapeerPas encore d'évaluation
- (PDF) Metal Casting Processes QUALITATIVE PROBLEMS Trien Nguyen - Academia - EduDocument1 page(PDF) Metal Casting Processes QUALITATIVE PROBLEMS Trien Nguyen - Academia - EduAlii AlliPas encore d'évaluation
- Grain Drying Fundamentals: Chapter ContentsDocument27 pagesGrain Drying Fundamentals: Chapter Contentsdeepu1009Pas encore d'évaluation
- Basic Pneumatic System ApplicationsDocument33 pagesBasic Pneumatic System Applicationsnarkuys syukranPas encore d'évaluation
- Jenbacher: 5.1.1 DescriptionDocument12 pagesJenbacher: 5.1.1 DescriptionJamil Ahmed100% (1)
- Ambato Psv-13 High Performance Series Rev1-40cDocument8 pagesAmbato Psv-13 High Performance Series Rev1-40cAlfredo OrellanaPas encore d'évaluation
- Morgana Digifold Service ManualDocument55 pagesMorgana Digifold Service Manualpfequip100% (1)
- Training ProjectDocument43 pagesTraining ProjectlokeshkrkushwahaPas encore d'évaluation
- Diagrama Vibrocompactador 533E PDFDocument17 pagesDiagrama Vibrocompactador 533E PDFdanflocaPas encore d'évaluation
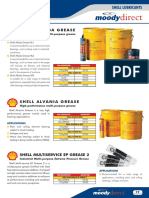
- Shell Lubricants Albida Alvania Multiservice GreasesDocument1 pageShell Lubricants Albida Alvania Multiservice GreasesvinothPas encore d'évaluation
- AT6504 AFL Notes PDFDocument52 pagesAT6504 AFL Notes PDFmeetbalakumarPas encore d'évaluation
- Re 79093Document4 pagesRe 79093Anonymous lIJl27QBXLPas encore d'évaluation
- Natco Fire-Coil: Model 175-400 Volume Water HeatersDocument32 pagesNatco Fire-Coil: Model 175-400 Volume Water Heatersadewunmi olufemiPas encore d'évaluation
- Knuckle Joints DesignDocument10 pagesKnuckle Joints DesignKvrd Prasad100% (1)
- 2002 Yamaha FZS1000 Service Repair Manual PDFDocument30 pages2002 Yamaha FZS1000 Service Repair Manual PDFjhjnsemmemPas encore d'évaluation
- 02 Dividing Head 1Document22 pages02 Dividing Head 1farid said errahmaniPas encore d'évaluation
- Guy Ropes DesignDocument8 pagesGuy Ropes DesignVenkatasubramanian IyerPas encore d'évaluation
- Manual Recambios 3.152.4 (CM51027) PDFDocument149 pagesManual Recambios 3.152.4 (CM51027) PDFValoys MirandaPas encore d'évaluation
- 9991013Document16 pages9991013dsn_sarmaPas encore d'évaluation
- Conditionals 20.3.Document32 pagesConditionals 20.3.Stefan PetrovićPas encore d'évaluation
- Force and Acceleration WorksheetDocument2 pagesForce and Acceleration WorksheetMIS NURUL IMAN JakbarPas encore d'évaluation
- Boncardo Freytag Mech 403 Final Project PresentationDocument8 pagesBoncardo Freytag Mech 403 Final Project Presentationapi-568978327Pas encore d'évaluation
- Design Chapter StaircaseDocument4 pagesDesign Chapter StaircaseAsish Seeboo100% (1)
- PACCAR MX Engine Reference Sheet PDFDocument2 pagesPACCAR MX Engine Reference Sheet PDFMalique ChamaunePas encore d'évaluation
- Spirax Sarco - Non Return Valve Type DCV3Document4 pagesSpirax Sarco - Non Return Valve Type DCV3jimmiilongPas encore d'évaluation
- MAB 103B-24 - Parts - 2011Document60 pagesMAB 103B-24 - Parts - 2011Centrifugal SeparatorPas encore d'évaluation
- Quadracci Pavilion - Hind Bitar PDFDocument10 pagesQuadracci Pavilion - Hind Bitar PDFHeind BitarPas encore d'évaluation