Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Neural Network Vs Regression AnalysisDocument14 pagesNeural Network Vs Regression AnalysisAhmadA.SwidanPas encore d'évaluation
- Techno-Economic Analysis of Combined Concentrating Solar Power and Desalination Plant Configurations in Israel..Document19 pagesTechno-Economic Analysis of Combined Concentrating Solar Power and Desalination Plant Configurations in Israel..AhmadA.SwidanPas encore d'évaluation
- Jee 483 Maritime Engineering Design: Virtual Conference Paper - Individual TaskDocument3 pagesJee 483 Maritime Engineering Design: Virtual Conference Paper - Individual TaskAhmadA.SwidanPas encore d'évaluation
- Ship StabilityDocument63 pagesShip StabilityAhmadA.SwidanPas encore d'évaluation
- Jee350 Rhino IntroDocument20 pagesJee350 Rhino IntroAnwarul Shafiq AwalludinPas encore d'évaluation
- Sample Paper Assignment 3Document9 pagesSample Paper Assignment 3AhmadA.SwidanPas encore d'évaluation
- Boundary Layer Chpter 7Document51 pagesBoundary Layer Chpter 7Mohamed Sayed SolimanPas encore d'évaluation
- Job Safety Analysis: Task: Location: Class: DateDocument6 pagesJob Safety Analysis: Task: Location: Class: DateAhmadA.SwidanPas encore d'évaluation
- Job Safety Analysis: Task: Location: Class: DateDocument6 pagesJob Safety Analysis: Task: Location: Class: DateAhmadA.SwidanPas encore d'évaluation
- Karman 1929Document7 pagesKarman 1929AhmadA.SwidanPas encore d'évaluation
- CrosswordDocument3 pagesCrosswordAhmadA.SwidanPas encore d'évaluation
- Gear Geometry PDFDocument5 pagesGear Geometry PDFAhmadA.SwidanPas encore d'évaluation
- 7748655w (1) Installation D5 - D16 PDFDocument212 pages7748655w (1) Installation D5 - D16 PDFAhmadA.SwidanPas encore d'évaluation
- Marine DesignDocument123 pagesMarine DesignDEEPAK100% (2)
- Brocken Improving The Reliability of Ship MachineryDocument140 pagesBrocken Improving The Reliability of Ship MachineryAhmadA.SwidanPas encore d'évaluation
- Governors Front PageDocument1 pageGovernors Front PageAhmadA.SwidanPas encore d'évaluation
- Experimental Methods in Marine DynamicsDocument182 pagesExperimental Methods in Marine DynamicsMULLAI100% (1)
- Brocken Improving The Reliability of Ship MachineryDocument140 pagesBrocken Improving The Reliability of Ship MachineryAhmadA.SwidanPas encore d'évaluation
- MSM 01 IntroductionDocument24 pagesMSM 01 IntroductionAhmadA.SwidanPas encore d'évaluation
- B015Document8 pagesB015marcos1corralPas encore d'évaluation
- Air Independent Propulsion PDFDocument10 pagesAir Independent Propulsion PDFAhmadA.SwidanPas encore d'évaluation
- From: Marine Engineering Chapter IX Reduction Gears, by Gary P. Mowers, (SNAME)Document1 pageFrom: Marine Engineering Chapter IX Reduction Gears, by Gary P. Mowers, (SNAME)AhmadA.SwidanPas encore d'évaluation
- Sa 1261Document23 pagesSa 1261AhmadA.SwidanPas encore d'évaluation
- 2Document5 pages2AhmadA.SwidanPas encore d'évaluation
- SKF Okf & Okfa CouplingDocument12 pagesSKF Okf & Okfa CouplingJurun_BidanshiPas encore d'évaluation
- Shipboard Operations II Parts 1A & 1B: Discharge of Coal at Port of Kakinada IndiaDocument10 pagesShipboard Operations II Parts 1A & 1B: Discharge of Coal at Port of Kakinada IndiaAhmadA.SwidanPas encore d'évaluation
- Reading Notes - AC SystemsDocument22 pagesReading Notes - AC SystemsAhmadA.SwidanPas encore d'évaluation
- Maritime Engineering Design JEE483 Analytic Hierarchy ProcessDocument23 pagesMaritime Engineering Design JEE483 Analytic Hierarchy ProcessAhmadA.SwidanPas encore d'évaluation
- Ship Design Procedure BookletDocument66 pagesShip Design Procedure BookletJolly Jack80% (10)
- Design EquationsDocument4 pagesDesign EquationsAhmadA.SwidanPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Facility Planning - Layout Process 4Document102 pagesFacility Planning - Layout Process 4nouman khan100% (1)
- Ventures Priamry Heritage-Social StudiesDocument128 pagesVentures Priamry Heritage-Social StudiesWryter Business100% (2)
- Jchps 6 (4) 15 Page 286-292 MsreddyDocument7 pagesJchps 6 (4) 15 Page 286-292 MsreddydwahyusafriPas encore d'évaluation
- Engaging MathematicsDocument48 pagesEngaging MathematicsDani ChiriacPas encore d'évaluation
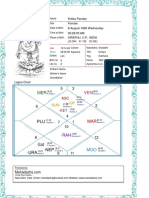
- Kritika Pandey (Kaushambi)Document15 pagesKritika Pandey (Kaushambi)nishink9Pas encore d'évaluation
- The Age of EnlightenmentDocument3 pagesThe Age of EnlightenmentIoana Botar100% (3)
- Nlaa Siam.2010Document1 pageNlaa Siam.2010YesicaAquinoPas encore d'évaluation
- C Test Questions and Answers PDFDocument15 pagesC Test Questions and Answers PDFVikas Bakoliya100% (1)
- Aunty Maria': Come Home For A Coffee: Teaching NoteDocument4 pagesAunty Maria': Come Home For A Coffee: Teaching NoteAditya DesaiPas encore d'évaluation
- 9348 26140 1 PBDocument8 pages9348 26140 1 PBALIS TEBALPas encore d'évaluation
- Punjab UNiversity MSC Hons. School Physics ElectronicsDocument41 pagesPunjab UNiversity MSC Hons. School Physics ElectronicsDarrenLovelockPas encore d'évaluation
- Iso 14520 5 2019Document9 pagesIso 14520 5 2019salazarafael0% (1)
- Renalyn N. Selloga Housekeeping NC IiDocument9 pagesRenalyn N. Selloga Housekeeping NC IiAlex GinPas encore d'évaluation
- Sustainable Architecture WikiDocument9 pagesSustainable Architecture WikisiddiqueaquibPas encore d'évaluation
- INGOLD, Tim. Perceiving The EnviromentDocument15 pagesINGOLD, Tim. Perceiving The EnviromentCassiana Oliveira da SilvaPas encore d'évaluation
- WebSphere Application Server AMI Cheatsheet For DemoDocument2 pagesWebSphere Application Server AMI Cheatsheet For DemoYakura CoffeePas encore d'évaluation
- MaseeiDocument34 pagesMaseeivikrant100% (1)
- Poly Suga BetaineDocument4 pagesPoly Suga Betainemndmatt100% (1)
- Happy Learn Haskell Tutorial Vol 1Document243 pagesHappy Learn Haskell Tutorial Vol 1joorcePas encore d'évaluation
- Space Lab 1Document4 pagesSpace Lab 1kael kwanPas encore d'évaluation
- Applied Thermodynamics IIDocument124 pagesApplied Thermodynamics IIHimanshu1712100% (2)
- Journal of Building Information Modeling - Fall 2010Document40 pagesJournal of Building Information Modeling - Fall 2010bimpirePas encore d'évaluation
- Course 5 - Cooperative Principle and ImplicatureDocument6 pagesCourse 5 - Cooperative Principle and ImplicatureAnca Ionela ManolePas encore d'évaluation
- 2009 S+S BrochureDocument45 pages2009 S+S BrochureSMITH+SMITHPas encore d'évaluation
- C#Document3 pagesC#Dung RieuPas encore d'évaluation
- The Green Marketing "Revolution" - Is It WorthDocument12 pagesThe Green Marketing "Revolution" - Is It WorthAndrew SmithPas encore d'évaluation
- Control Exceptions and Deficiencies Evaluation FrameworkDocument22 pagesControl Exceptions and Deficiencies Evaluation Frameworkmarinas80100% (1)
- Circular QueueDocument10 pagesCircular QueuesalembalkiPas encore d'évaluation
- Wolves, Witches, and Werewolves - Lycanthropy and Witchcraft From 1423 To 1700 PDFDocument28 pagesWolves, Witches, and Werewolves - Lycanthropy and Witchcraft From 1423 To 1700 PDFshotoshPas encore d'évaluation
- More Success by Doing Less - The Art of DelegationDocument6 pagesMore Success by Doing Less - The Art of DelegationWendel RharaelPas encore d'évaluation